二轮平衡车的神经元控制算法及仿真
2022-10-25沈浩宇江先志冯涛
沈浩宇,江先志,冯涛
(1.浙江理工大学机械与自动控制学院,浙江杭州 310000;2.深圳海关工业品检测技术中心,广东深圳 518000)
0 前言
二轮平衡车是一种特殊的轮式机器人,它是一个融合了动力学、自动控制理论、电子技术、电机技术的综合性研究课题。它利用车体内部的陀螺仪和加速度传感器检测车体姿态的变化,并利用伺服控制系统精确地驱动电机进行相应的调整,以保持系统平衡。二轮平衡车本质上是一个可移动的倒立摆系统,具有多变量、强耦合性、非线性、动态不稳定的特点。
目前二轮平衡车采用的控制算法有PID控制、模糊控制、滑模控制、预测控制、H控制、LQR控制等。文中采用神经元PID控制算法控制二轮平衡车,以测试神经元PID控制的效果。PID控制是迄今为止在过程控制中应用最广泛的控制方法。但是在实际应用中,经典PID控制器的控制参数为人工整定后固定不变,要想将其调节到较为理想的状态,整定过程费时费力。实际被控对象往往具有非线性、时变不确定性,难以建立精确的数学模型,常规的PID控制器不能达到理想的控制效果。
近年来,神经网络算法迅速发展,引起了人们越来越多的兴趣和普遍重视。由于BP神经网络能够通过神经元反馈进行学习,不断调整各层神经元之间的连接权重,适应被控系统的不确定性和非线性 ,由神经元构成的控制器具有更好的灵活性和适应性。
1 二轮自平衡车分析
二轮平衡车三维模型如图1(a)所示,二轮平衡车简图如图1(b)所示。在图1(b)中,跟随车身的动坐标系原点建立在车轴的中心处,轴正方向为二轮平衡车的前进方向,轴与重力方向的反方向重合,轮子绕轴转动。为二轮平衡车绕轴旋转的角度,为二轮平衡车的倾角,和分别为二轮平衡车左轮和右轮的输入转矩。
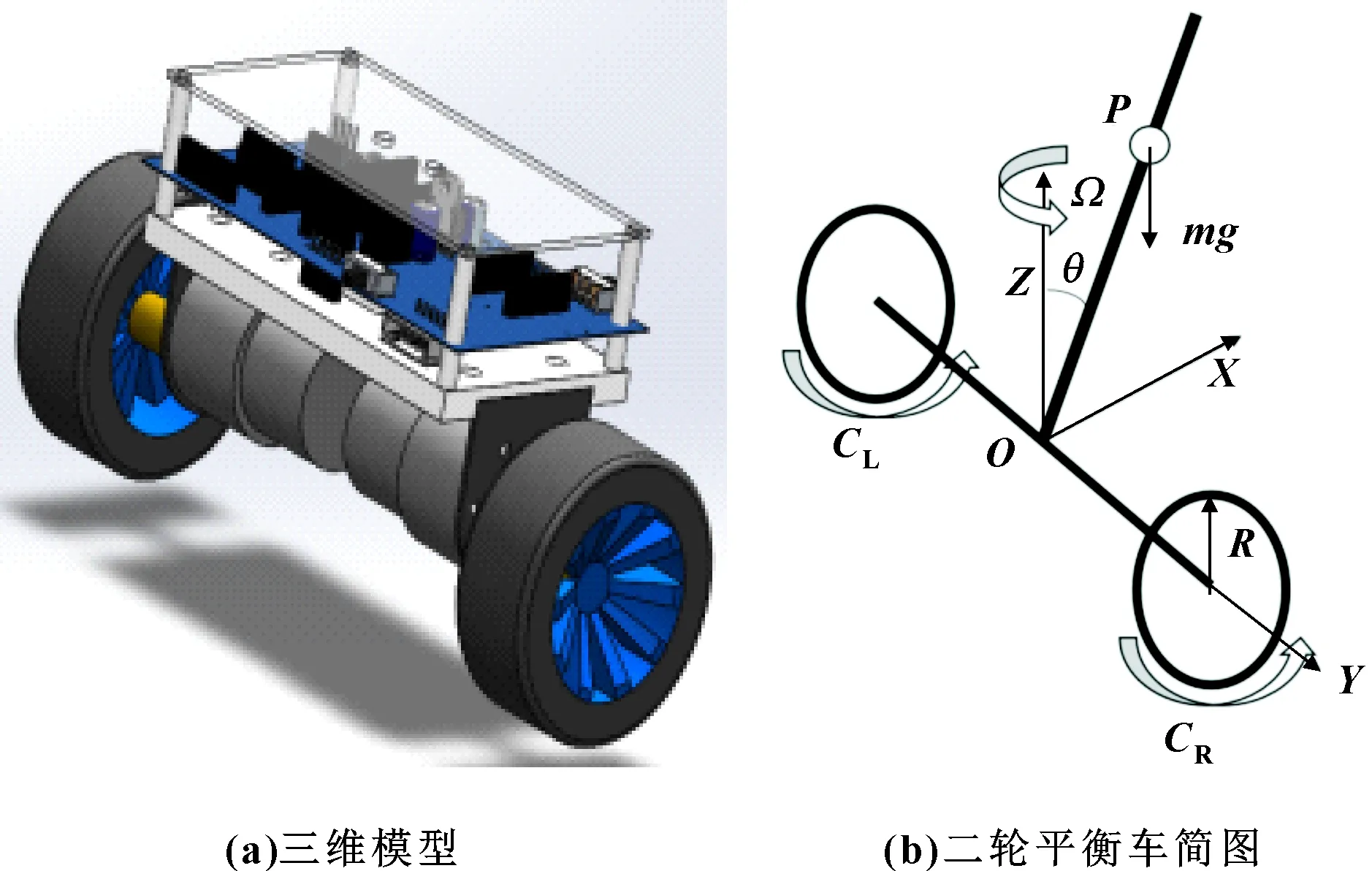
图1 二轮平衡车三维模型及简图
二轮平衡车的重心位于车轮轮轴上方的点,由于点位于车体上部,在无外力的作用下,车体将会发生倾倒,故二轮平衡车属于动态不稳定系统。二轮平衡车的车轮采用共轴对置放置的方式,并且两轮由2个电机相互独立驱动。二轮平衡车通过调整前后运动的加速度来保持自身平衡,还具备通过控制左右车轮转速差实现转向的功能。
2 二轮平衡车控制系统设计
二轮平衡车需要被控制的变量有车体运行速度、倾斜角度和偏航角度,而控制输入量只有作用于左右两轮的电机输出扭矩,所以二轮平衡车是一个典型的欠驱动系统。各个被控变量和控制输入量之间的关系是非线性的,各个被控变量之间具有强耦合性。针对二轮平衡车欠驱动、多变量、强耦合、非线性等特性,采用神经元PID控制器进行控制。神经元PID控制器是一种自适应智能控制器,能够针对不同的工况自动整定PID参数,具有自学习自适应能力,使被控对象达到良好的控制效果。
2.1 神经元PID控制器
在神经网络理论中,神经元模型可模拟生物神经元的3种基本功能。首先,根据不同的权重对所有输入信号进行不同程度的加权,然后将这些信号相加以获得组合效果。最后,利用神经元输出函数进行信息输出。神经元PID控制器是采用人工神经元建立的PID控制器模型,通过BP神经网络算法调整PID参数。神经元网络计算量小、运行速度快,且可自适应调整权值。将它用在PID闭环控制中,形成单神经元PID控制器。这样PID参数整定过程就相当于单神经元网络的权值调整过程。人工神经元PID控制器的结构如图2所示,单神经元控制原理如下:
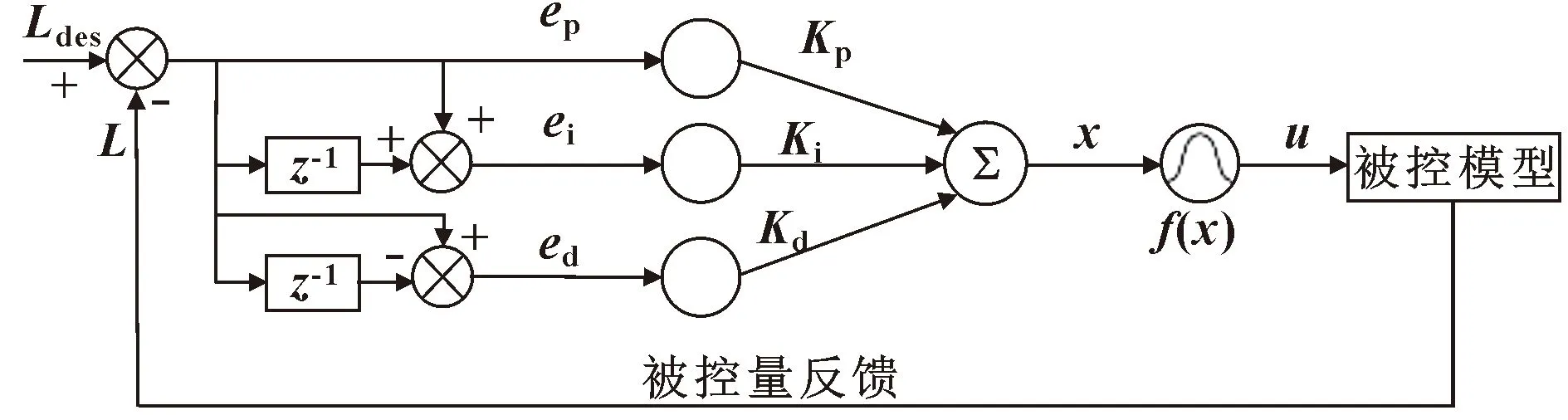
图2 神经元PID控制算法原理
由图2得到神经元PID控制器的前向传播过程:
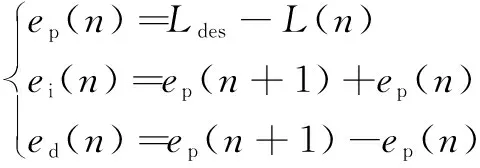
(1)
=++
(2)
采用Sigmoid型函数,对进行限幅输出,使得输出值限制在合理的范围:
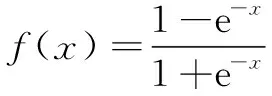
(3)
=()
(4)
误差指标为

(5)
BP算法采用的误差反向传播是按照误差指标函数()的负梯度方向不断修正权值以达到神经元的输出逼近期望的目的。根据前向传播过程,得:
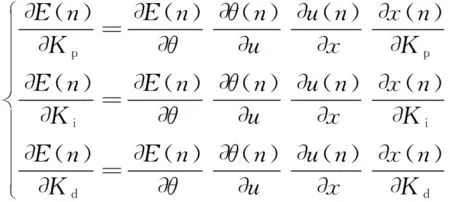
(6)
控制器的目标是让实际当前值与目标值的误差指标最小。根据BP算法进行PID参数的更新,PID参数的迭代使得系统的误差指标尽可能小。迭代公式为(7),其中、、分别为比例增益、积分增益和微分增益的学习步长。

(7)
由式(5)得神经元控制指标对被控制量的偏导为

(8)
由式(3)得到限幅函数()对神经元输出量的偏导为

(9)
被控系统对控制信号的偏导可以设为

(10)
由式(2)得神经元输出量对比例增益、积分增益、微分增益的偏导为

(11)
将式(8)—(11)代入式(6),再根据式(7)得神经元PID控制器的比例增益、积分增益和微分增益的迭代更新算法:
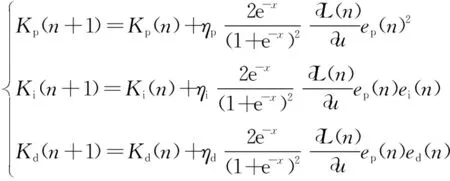
(12)
2.2 神经元PD平衡控制器
二轮平衡车的平衡是通过前后移动保持的。将平衡车偏离平衡位置的角度作为偏差,通过负反馈控制消除偏差。
在仅有比例控制的情况下,二轮平衡车处于平衡位置时,因为偏差为0,所以控制器输出也为0。但是,车体绕车轴转动时具有惯性,平衡车会往另一个方向倒去,如此反复,平衡车会在平衡位置出现振荡且无法停止。由于平衡车绕轮轴的转动惯量客观存在,控制平衡车平衡不仅需要施加和倾角成正比的回复力,还需要和角速度方向相反的阻尼力进行叠加,才能达到控制平衡的效果。
平衡车的平衡控制需要快速性,故比例系数较大。当比例系数较大时,系统几乎不存在静差。因为PID控制器中积分的作用是消除静差,所以静差对于直立控制的影响很小,自然就不需要积分。实际上,平衡车并不一定要完全处于机械中值,略微的偏移不会有太大影响。因此,对于准确性要求不高的系统可以不引入积分控制,平衡车只需PD控制即可实现直立。因此,将平衡控制器设计为PD平衡控制器。
构建PD平衡控制器,如图3所示。
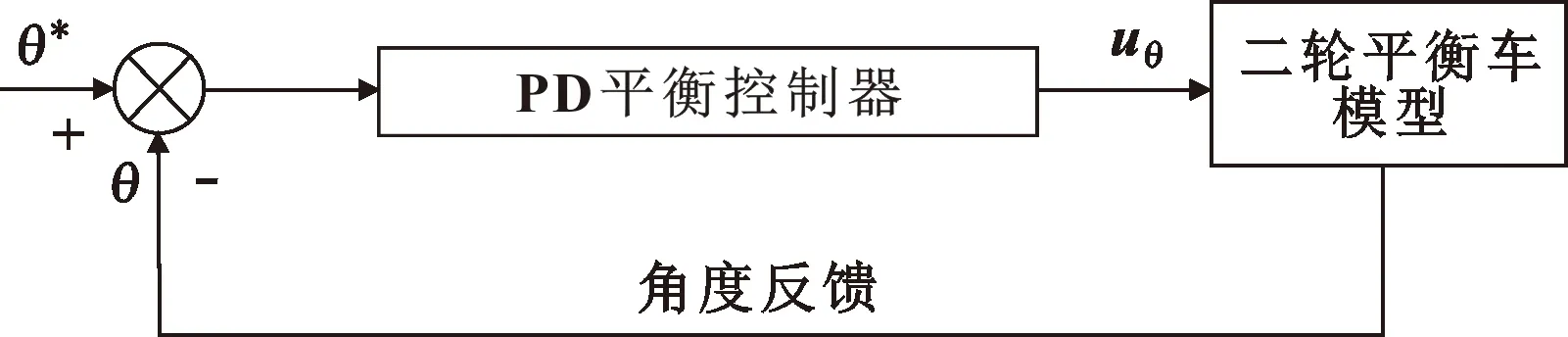
图3 PD平衡控制器
为实现PD参数可调,引入神经元PD平衡控制器,如图4所示。
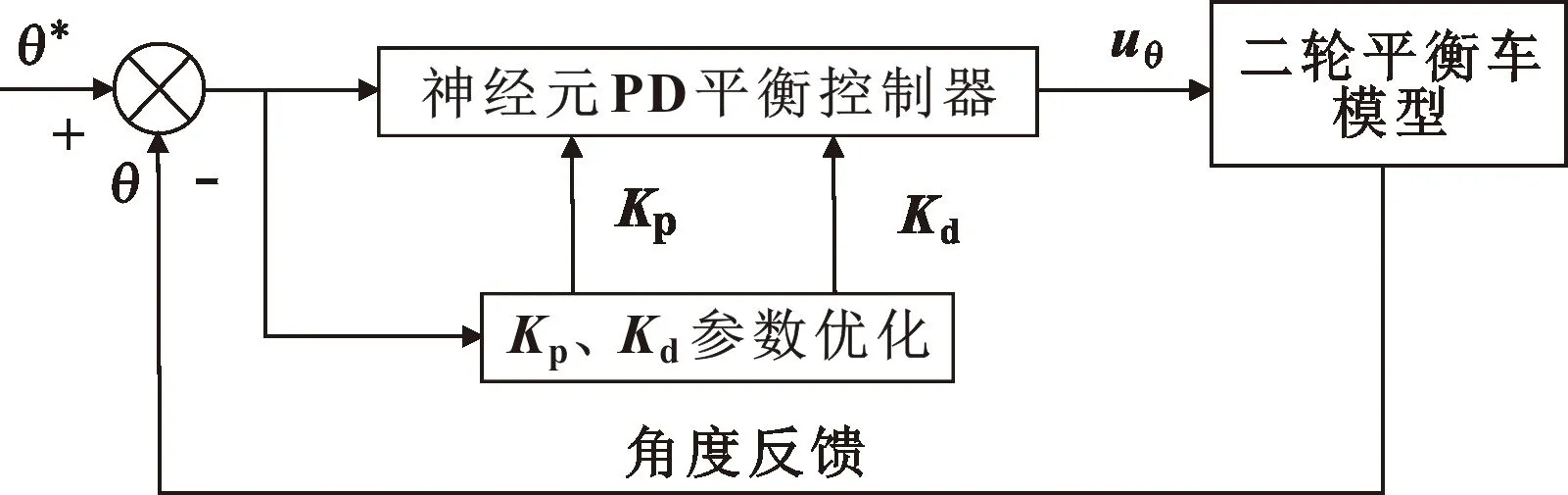
图4 神经元PD平衡控制器
根据式(4),神经元PD平衡控制器的前向传播过程如下:
=(pp+dd)
(13)
由式(5),设置平衡控制器的误差函数为

(14)
其中:代表目标值;()代表传感器的检测值。
由式(6)—(11)可知神经元PD平衡控制器的PD参数的更新过程如下:
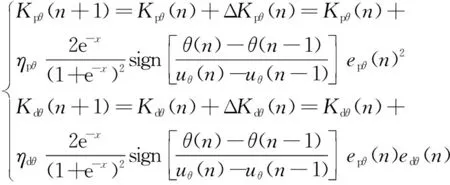
(15)
2.3 神经元PI速度控制器
因为平衡车的速度控制是在平衡车进行直立控制的前提下进行的,所以速度控制相比直立控制更加复杂。为保证直立控制的优先级,把速度控制器放在直立控制器的前面,即速度控制调节的结果仅仅是改变平衡控制的目标值。平衡车运行的加速度与平衡车倾角相关。若要提高平衡车向前行驶的速度,就需要平衡车向前倾斜,车轮在直立控制的作用下向前运动保持平衡车平衡。反之亦然,因此速度控制可以通过调节平衡控制的目标值来实现。根据上述过程,将速度控制器与直立控制器进行串联。将速度控制器的输出作为直立控制的输入,将直立控制的输出作为系统输出。设计出串联的平衡车控制器,如图5所示,这其实就是一个串级速度控制系统。
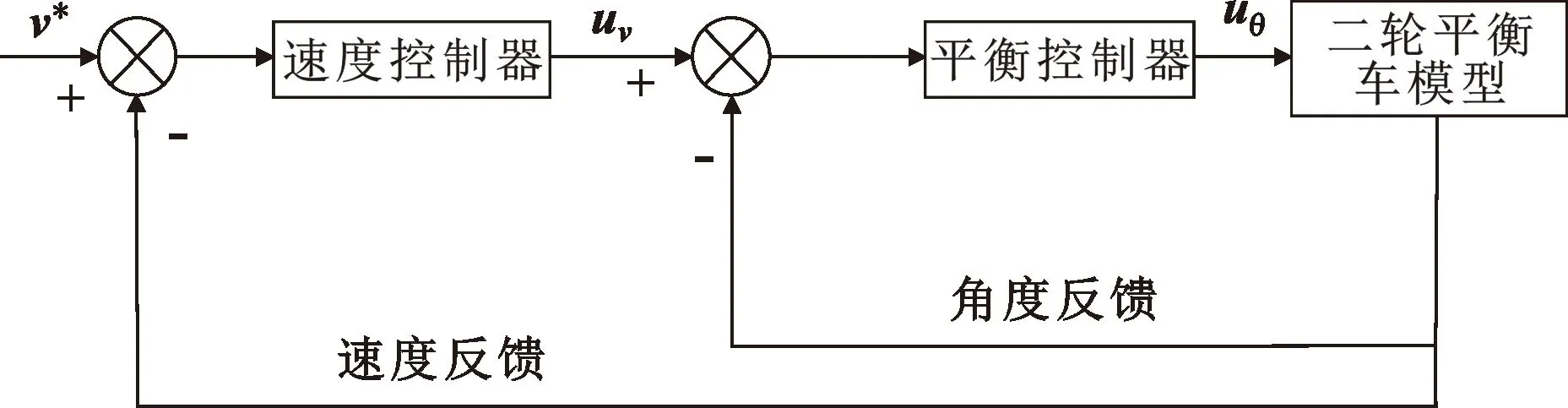
图5 串级PI速度控制
测量的机械中值与实际值存在误差,若只有平衡控制器,平衡车会一直前进或后退来维持有误差的测量中值,此时,速度控制器的输出将修正平衡控制器的目标值。当平衡车一直前进或后退,速度与目标速度之间存在静差。PI控制器具有消除静差的特点,使得平衡车可以稳定在原点,故速度控制器选用PI控制器。
为了实现速度控制器的PI参数可调节,速度控制器采用神经元PI控制器,如图6所示。
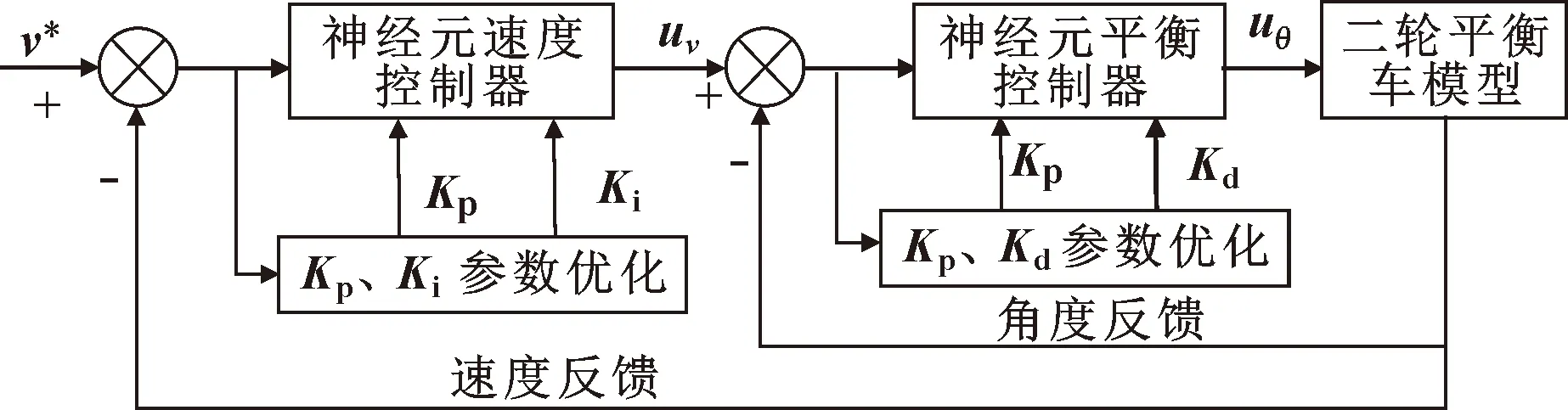
图6 串级神经元PI速度控制
神经元平衡控制器的前向传播算法公式:
=p(p-)+dd
(16)
=(pp+ii)
(17)
将式(17)代入式(16)得到:
=p[p-(pp+ii)]+dd
(18)
由式(5),设置神经元速度控制器的误差函数为

(19)
由式(6)—(11)可知PI参数的更新过程如下

(20)
2.4 PD转向控制器
由于平衡车对转向控制的响应要求不高,故转向控制器为简单的PD控制器。若设轴目标角度为0,则平衡车沿一条直线行走。
根据式(1)得到转向控制器的算法:
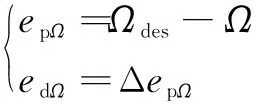
(21)
=pp+dd
(22)
二轮平衡车由左右轮的差速来控制方向,故将转向控制器的输出值作为速度控制器输出值的调整值,分别输出给左右轮的电机驱动
(23)
将转向控制器与串级速度控制器串联,构建了二轮平衡车的神经元PID控制系统,如图7所示。

图7 二轮平衡车神经元PID控制系统
3 搭建二轮平衡车仿真环境
在Simulink环境中通过组装Simscape提供的基本部件或运用基于Simscape基本组件创建新组件,可以快速创建电机、桥梁、整流器、液压执行器和制冷器等物理系统。Simscape的基本组件可以使用MATLAB变量和表达式参数化模型。Simscape可帮助开发控制系统并测试控制系统的性能。
如图8所示,Simscape中的Multibody主要包含带和缆绳、形状元素、约束限制、曲线和曲面、力和扭矩、坐标转换、齿轮和配合、运动关节、机械配置九大基本组件集合。Multibody为机器人、车辆悬架、建筑设备和飞机起落架等3D机械系统提供仿真基本组件,可以表示身体、关节、约束、力和传感器的基本组件,以对系统进行建模。Simscape可以将完整的CAD组件(包括质量、惯性、接头、约束和3D几何形状)导入模型,为整个机械系统制定和解决运动方程,仿真运行时自动生成3D动画来实现系统动态可视化。
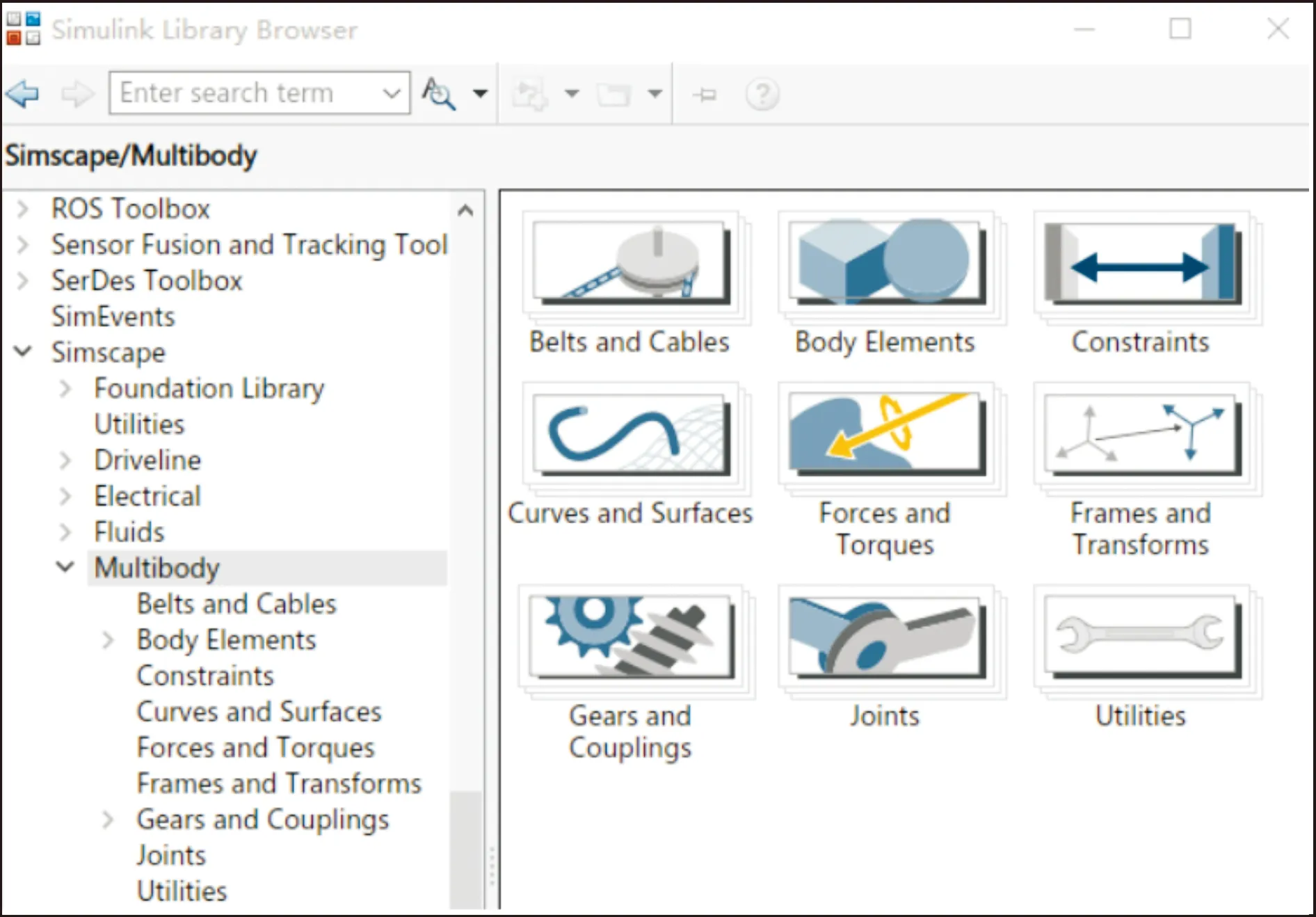
图8 Multibody集合
3.1 搭建二轮平衡车仿真模型
根据实物在SolidWorks中构建出车体零件,并进行装配。将构建的各个零件转换为STEP格式,导入形状元素组件集的文件实体组件中。二轮平衡车主要包含的零部件如表2所示。编写M文件,将零部件的颜色、质量等参数合存储为工作区变量,可以在仿真的实体组件中引用变量作为零件的属性参数。
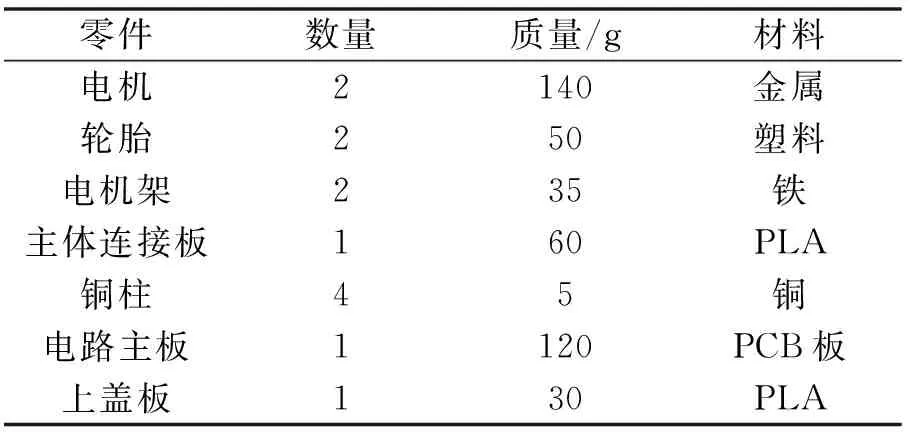
表2 DWC机器人零件
如图9所示,设置重力环境、世界坐标系、仿真求解器组件,三者缺一不可。世界坐标系原点为车轴的中心,通过设置坐标变换组件将地面放置在合适的位置,地面与车轮之间连接有接触应力组件;通过滑动关节组件与平面关节组件连接,首先保证左右车轮具有固定的相对位置,其次平面关节保证车轮具有前后、左右2个自由度,滑动关节保证二轮平衡车沿受重力落在地面上,在车轮与地面之间接触形成压力。如图10所示,以右轮为例,将转动关节组件安置在合适的位置,将车轮进行坐标转换与转动关节组件连接。转动关节组件接收转矩的输入与转动关节的角速度输出,并保证轮子的旋转自由度;如图11所示,车轮轴线与车体之间由转动关节组件连接,该转动关节接收扭矩的输入和角度输出。车体分为左右电机、电机架、电路主板、主体连接板、上盖板、铜柱等。

图9 二轮平衡车系统
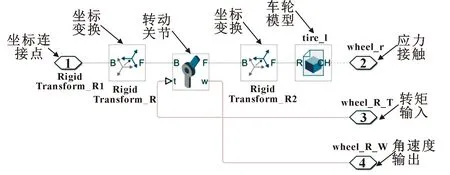
图10 右轮模型

图11 倾角关节
3.2 搭建控制系统
运用Simulink搭建仿真控制系统,如图12所示,图右边部分为二轮平衡车的控制系统。根据图5所示的控制系统结构,搭建仿真模型,通过左边的仿真模型采集模型的倾角信息、转向角信息、轮速信息并进行单位转换。
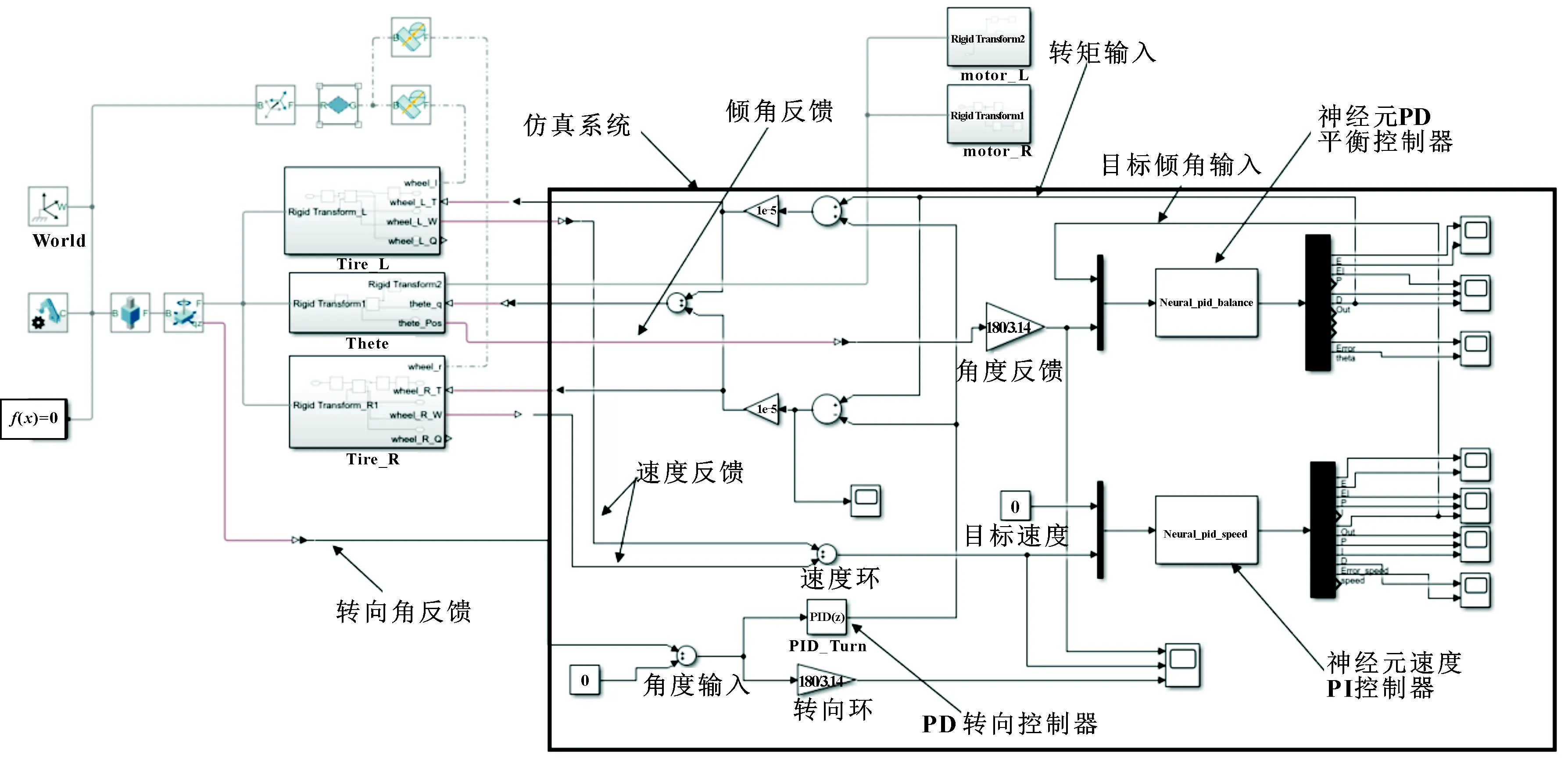
图12 Simulink仿真系统
S-Function全称System-Function,S-Function能够与Sinulink引擎交互,它极大地拓展了Simulink的功能。S-Function可以容纳连续、离散和混合系统,在S-Function中编写算法,并添加到Simulink模型中。S-Function通过遵循一组简单的规则,定义了在初始化、更新、求导、输出和终止环节如何工作。在每一个环节中,Simulink的引擎都会调用一个方法完成特定的任务。
神经元平衡控制器和神经元速度控制器由MATLAB中的S-Function组件编写。控制系统为离散系统,每0.01 s进行一次信号采样和输出。仿真启动之后,首先进行状态变量的初始化,控制系统在每0.01 s的时间中接收仿真系统的传感器信息,采用BP神经网络算法完成控制系统状态变量的更新和控制量的输出。为方便调节参数,使用示波器模块完成数据的采集和监视。
BP神经网络算法的学习率对算法的效果起着至关重要的作用。BP神经网络算法采用梯度下降的搜索算法,这些算法会先初始化一个解,在这个解的基础上,确定一个搜索方向和一个移动步长,使初解根据这个方向和步长移动后,能使被控系统的误差下降。然后更新出新的解,再继续搜寻下一步的移动方向的步长,这样不断迭代下去,被控系统的误差不断下降,最终能找到一个解,使得误差尽可能地小。在寻求最优解的过程中,步长太大,就会搜索得不仔细,可能跨过更加合适的解;步长太小,又会使得寻解的过程进行得太慢。因此,步长设置适当非常重要。
4 实验
对比PID控制器、神经元PID控制器在二轮平衡车上的控制效果,控制内容包括平衡控制和速度控制。分别在空载和负载下进行实验,其中负载时,物块的质量为100 g。图13所示为仿真系统呈现的二轮平衡车的三维可视化仿真结果。
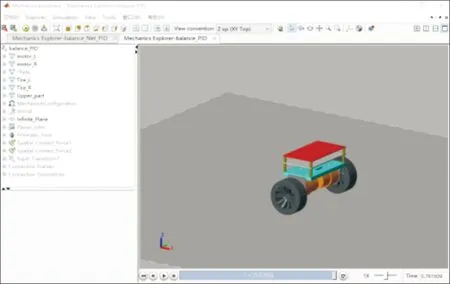
图13 Simcape的三维可视化仿真结果
4.1 空载下控制性能实验
平衡车的平衡性能主要指它站立时,波动范围越小,表明平衡车平衡控制性能越好。同时二轮平衡车轮子的速度变化范围越小,说明二轮平衡车偏离原点的范围越小,即平衡车的速度控制性能越好。
图14所示为空载下神经元PD平衡控制器与传统PD平衡控制器控制平衡车倾角变化过程。可知:神经元PD平衡控制器的倾角在2 s之前波动幅度大于PD控制器,但是随着神经元更新PD参数至收敛值,二轮平衡车的倾角几乎稳定在目标值0;PD平衡控制器的倾角变化幅度始终在-0.5°~0.5°之间,几乎无变化。此时神经元PD平衡控制器的值和值学习过程如图15所示,学习率分别为0.001和0.2。值收敛在0.365,值收敛在0.781。
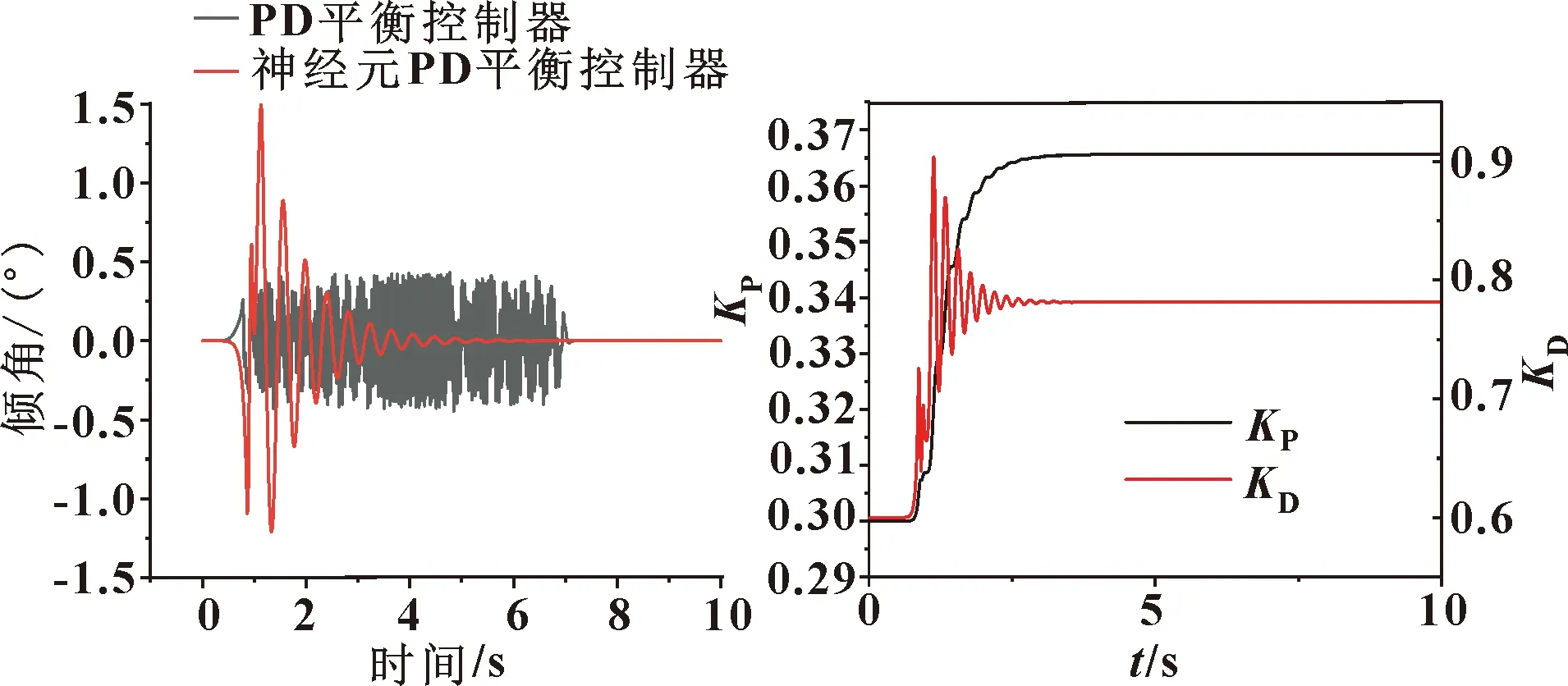
图14 空载下2种控制器倾角变化过程 图15 神经元平衡控制器PD参数迭代
图16所示为神经元PI速度控制器与PI速度控制器控制二轮平衡车速度变化过程。可知:神经元PI速度控制器控制的二轮平衡车速度在刚开始时有大幅度的波动,但是速度的波动幅度始终小于PI控制器,且在大约1.2 s之后,速度变化几乎接近于目标值0;PI控制器控制的轮速始终在-2.5~ 2.5°/s的范围内高频波动。设置神经元PI速度控制器中、参数的学习率分别为0.000 2和0.000 000 1,如图17所示,、的最终收敛值分别为0.011 1和0.000 001 43。
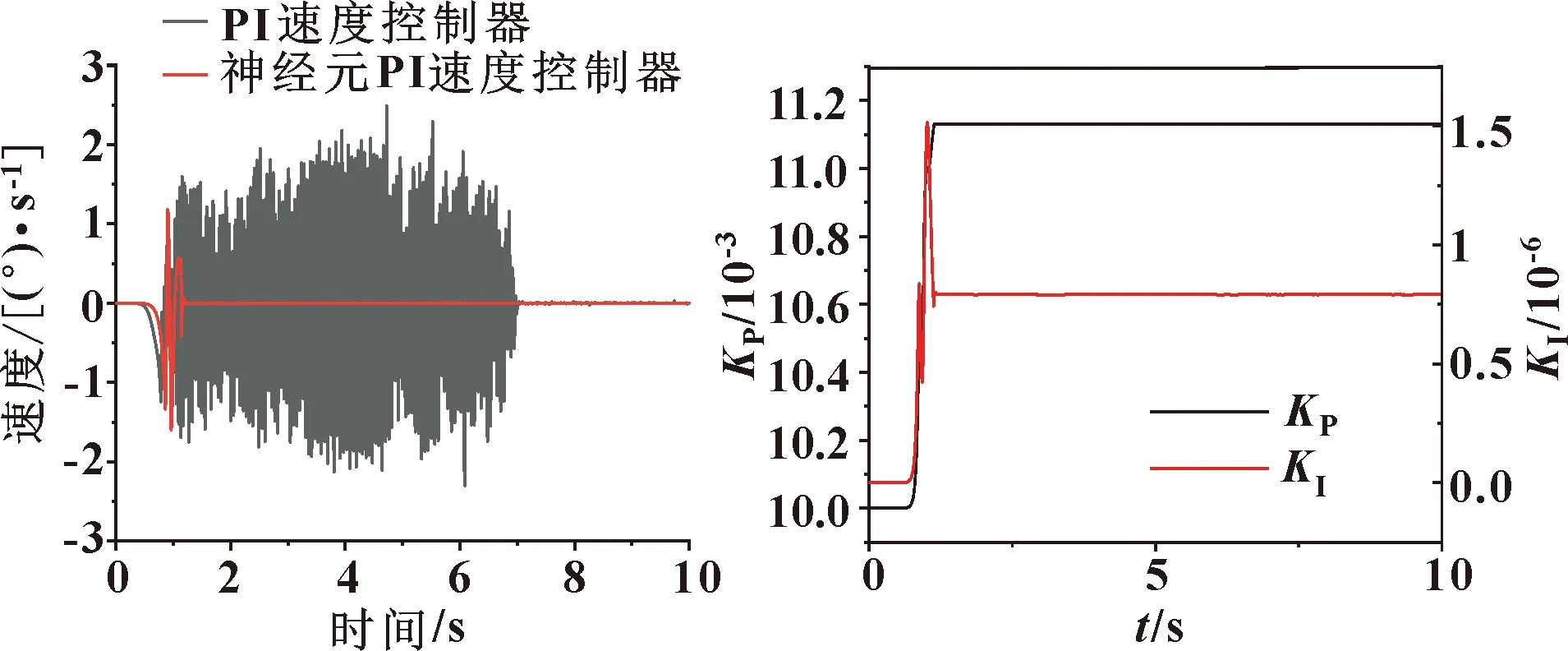
图16 空载下2种控制器速度变化过程 图17 神经元速度控制器PI参数迭代
4.2 负载下控制性能实验
在二轮平衡车上部施加0.1 N垂直向下的力来代表物块。对比神经元PID与传统PID控制的抗干扰能力。二轮平衡车越能够快速地回到稳定状态,且倾角和速度产生波动的范围越小,波动曲线越平缓,控制器的抗干扰性能越好。
图18所示为负载下神经元PD平衡控制器与传统PD平衡控制器控制平衡车的倾角变化过程。可知:神经元PD平衡控制器控制的倾角的波动范围为-2°~2°,而PD平衡控制器的倾角波动范围为-4.5°~4.5°,且波动频率高于神经元PD平衡控制器。神经元PD平衡控制器的抗干扰性能优于PD平衡控制器,但是在干扰结束后,收敛速度慢于PD平衡控制器。此时神经元PD控制器的值和值的学习过程如图19所示,学习率不变。值收敛在0.553,值终值在1.12,根据趋势,随着仿真时间的增加,也必然收敛。
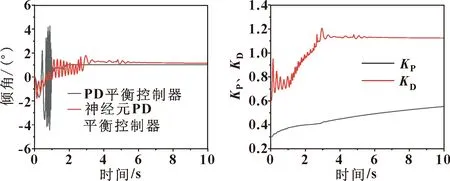
图18 负载下2种控制器倾角变化过程 图19 负载下神经元平衡控制器PD参数迭代
图20所示为负载下神经元PI速度控制器和PI速度控制器控制平衡车速度的变化过程 ,神经元PI速度控制器控制的速度波动范围为0~16°/s,速度波形较为平缓,而PI速度控制器控制的速度波动范围为-17.5~27.5°/s,且波动频率远高于神经元PI控制器。二轮平衡车在神经元PI速度控制器的控制下可迅速地到达目标速度值0。此时神经元PI速度控制器的值和值学习过程如图21所示,学习率不变。可知:值收敛在0.218,值收敛在0.002 07。
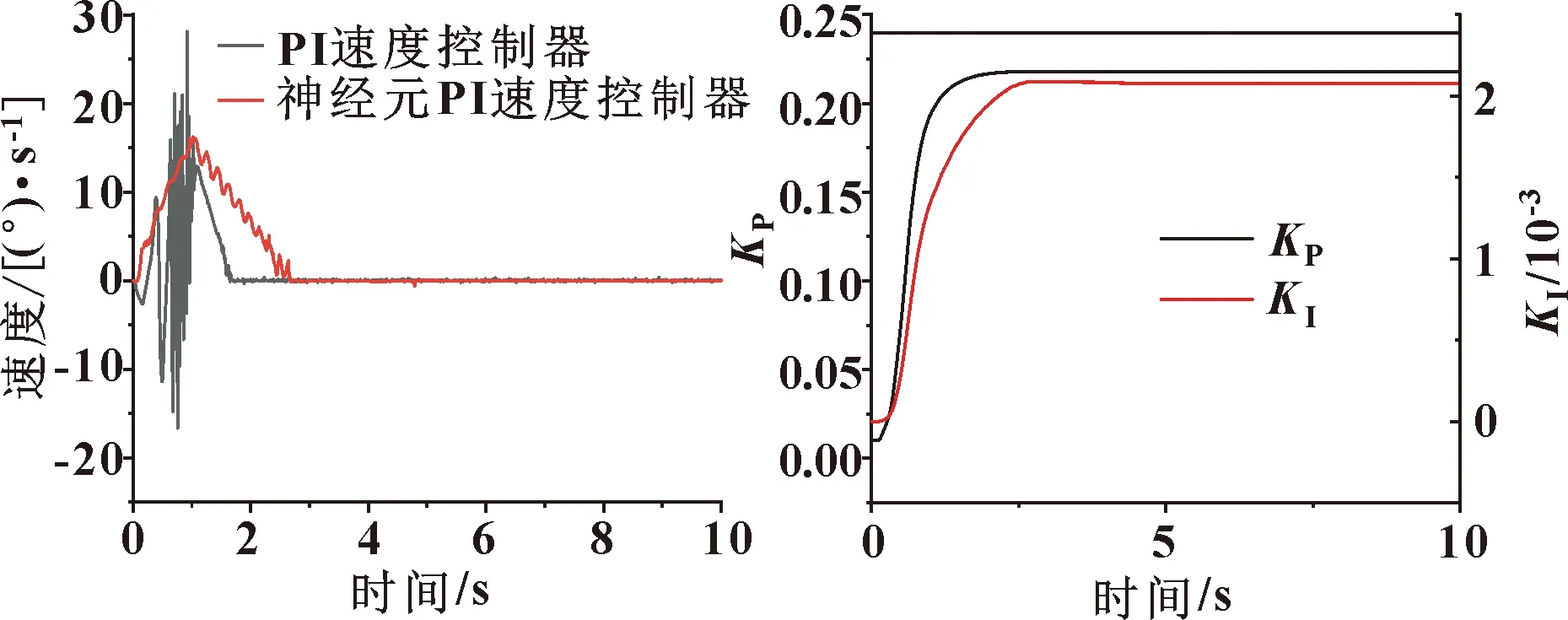
图20 有干扰速度变化过程 图21 神经元速度控制器PI参数迭代
5 结论
本文作者运用MATLAB-Simulink-Simscape-Multibody快速搭建二轮平衡车的三维仿真模型,并使用Simulink搭建控制系统。在S-Function组件中编写神经元PID控制算法来实现倾角控制器、速度控制器和转向控制器,并组合成二轮平衡车的控制器,进行二轮平衡车的平衡控制、速度控制和方向控制。通过空载和负载2个控制性能实验,验证了神经元PID控制器相比传统的PID控制器具有更高的控制精度、更强的抗干扰能力、更快的响应速度、更能适应模型的非线性变化。相对于传统PID控制器,采用神经元PID控制器的二轮平衡车在平衡控制和速度控制上都有具有更好的性能。
