全极化雷达抗拖曳式有源干扰技术
2022-10-24刘玉静苏宏艳杨彩霞樊润东
刘玉静,苏宏艳,杨彩霞,樊润东
(北京遥感设备研究所,北京 100191)
0 引言
面对复杂多变的作战环境,雷达必须具有在恶劣战场环境下仍然能够正常工作的能力。为了提升雷达的抗干扰性能,需从干扰本身的信号特征、释放过程以及相应的抵抗原理进行研究,尽量减小甚至消除干扰所带来的负面影响,使雷达能够正常工作。现有的雷达大多是单极化状态工作体制,针对有源干扰,主要是在时域、频域、空域进行对抗。而随着数字射频存储器技术的发展,产生的有源干扰使得雷达在时域、频域和空域都难以鉴别和抑制。极化抗干扰技术利用目标、干扰的极化特征差异,对干扰进行抑制,是制导雷达一种新的抗干扰的有力手段。充分利用极化雷达的优势,提高对目标的检测跟踪能力以及抗干扰能力,具有重要的研究意义。
近年来,随着人们对目标极化散射行为的本质认识日益加深,并且在极化捷变和分集技术的工程实现上取得了突破,有关极化信息在目标极化检测、干扰抑制、信号增强与滤波等方面的研究已有较多基础,并正在逐渐成为热门研究课题,尤其是极化滤波抗干扰方面。极化滤波是提高雷达抗干扰能力的一门新兴技术,它是根据雷达目标信号与干扰信号极化状态之间的差别选择发射或接收天线的极化状态,或利用虚拟极化技术使干扰输出最小,有用信号输出最大,应用前景广阔。文献[3]提出了虚拟极化适配的概念,从理论上解决了对稳态目标的极化测量问题,并根据虚拟极化适配的原理提出了多凹口极化滤波和单凹口自适应极化滤波等直接抑制干扰电磁波的抗干扰技术。当干扰信号和有用信号在时域、频域以及空域的状态特征都很接近时,可以考虑利用干扰和信号在极化方面的差异,采用适当的信号处理技术对其加以区分,从而达到有效抑制干扰、改善信号接收质量的目的。
1 拖曳式诱饵有源干扰机理
拖曳式诱饵作为一种典型的非相干双点源干扰,工作示意图如图1 所示,其干扰过程主要包括4 个阶段:

图1 拖曳式诱饵示意图
1)机载雷达告警,释放诱饵干扰
当机载雷达告警器发现受到威胁时,载机释放诱饵,通过截获对方发射的信号,转发或者应答模式发射干扰信号。开始阶段,载机距离雷达较远,加之诱饵与载机的运动特性基本一致,雷达无法从距离、速度和角度分辨出诱饵。
2)载机机动,形成三角态势
机动的目的主要有两个,一是避免载机与诱饵形成无效锥形区域,二是拉大了雷达与载机连线与雷达与诱饵连线之间的夹角,得到更好的角度欺骗效果。
3)夹角增大,导引头被诱骗
随着雷达与目标的距离减小,夹角逐渐增大。由于拖曳式诱饵干扰信号的功率一般比目标回波功率大,根据双点源干扰的原则,雷达的跟踪角将位于目标与诱饵之间,且靠近功率较大的诱饵,随着载机的机动,载机将会向雷达波束的边缘移动。
4)载机逃离,精确打击失效
当目标与诱饵之间的夹角大于雷达半波束宽度时,载机逃离雷达波束,仅留下拖曳式诱饵留在雷达波束内,雷达丢失目标,精确制导失败。
接收天线截获的威胁信号输入信号接收机/处理器,其输出再去控制干扰波形产生器,以产生各种最佳调频、调幅或调相等调制的干扰波形,对付各种特定威胁雷达。技术产生器产生的射频信号,经转换器变成光频信号,然后由拖曳光纤送到诱饵飞行体上,在那里再转换成微波射频信号,经末级功率放大后由发射天线辐射出去。如果接收器发生故障,接收天线的信号可直接经独立的宽带转发器输入转换器再经光纤送到诱饵飞行体上,这时,诱饵仅是一个简单的转发式诱饵。投放诱饵的时机和干扰发射装置的控制,可由载机上雷达告警系统给出的指令启动。
2 极化抗拖曳式诱饵有源干扰
2.1 极化滤波与鉴别
有源干扰可分为压制式噪声干扰、假目标干扰等几个类别,尤其在多个假目标干扰的环境下,为了能够准确识别目标,获取目标的极化特征,需要先对多个目标进行鉴别。由于逼真假目标与目标特性相近,在时域、频域很难进行鉴别,研究目标和干扰的极化鉴别技术,从极化域的角度分析目标和干扰的差异,鉴别出真、假目标,从而设计极化滤波器滤除有源干扰,增强目标信号检测概率。
有源压制式干扰的判决,可以从时域或者频域的角度进行判断,从时域和频域均可以根据能量准则来判断有源压制干扰的存在与否。当回波信号的接收电平与平均噪声电平的差值大于门限时,判断存在有源压制式干扰。针对有源假目标干扰,尤其是多假目标的场合,从时域和频域均不能判断检测的峰值单元是真目标或假目标,此时需要从极化域对真假目标进行判决。
假设雷达的2 个发射天线的极化方式为垂直极化和水平极化,接收天线同时也采用水平极化天线和垂直极化天线进行接收目标回波信号和干扰信号。对接收到的回波信号采用类似二元检测的方式进行极化鉴别,选择Re( z)作为检测统计量,则判决表示式为:

式中,门限根据检测需求设定,=[,,…,z],z=[ z,z,…,z],,,…,z分别表示每个脉冲对应的观测统计量,为接收的信号统计量。
在完成压制干扰和假目标干扰鉴别之后,利用相干矩阵递推算法自适应地估计回波的极化状态信息,分别对目标和干扰信号参数进行极化估计,设计相应极化滤波器完成滤除干扰的信号处理。极化滤波的关键是获取“最佳接收极化”,即确定极化接收通道间的加权系数,计算途径包括均值估计、迭代计算等。极化滤波最为典型的应用是通过极化对消实现对雷达主瓣干扰的抑制。常见的雷达主瓣干扰包括随队式干扰、自卫式干扰等,位于雷达天线探测目标时的天线主波束内,往往具有时域、频域覆盖目标回波而空域与目标无法区分的特点,传统抗干扰措施难以奏效。
2.2 极化域抗干扰处理流程
从上述分析中,可以总结出针对光纤拖曳式诱饵有源干扰的极化处理流程,首先需要利用双极化天线接收回波信号,并进行下变频和匹配滤波处理,再对有源干扰进行基于多脉冲回波的时域估计,利用得到的极化参数估计值输入极化鉴别器,鉴别出诱饵假目标;利用得到的极化参数估计值设计对应的单凹口极化滤波器,对诱饵干扰进行极化滤波,最终得到较高的信噪比,从而提高目标的检测性能。具体工作流程图如图2 所示。

图2 极化信息处理流程
2.3 仿真校验
雷达采用水平垂直双极化发射,水平垂直双极化接收的同时雷达极化信息测量体制。假设诱饵入射角为,拖曳线长度为,则诱饵到雷达的距离为:

式中,目标距雷达距离为=500 m,目标方位角、俯仰角设定为0°,输入信噪比为SNR=0 dB,目标极化散射矩阵如式(3)所示。拖曳式诱饵拖曳线长度设定为=150 m,诱饵与雷达视线的夹角为=0.5°,诱饵干扰的干噪比JNR=10 dB,诱饵采用转发式假目标干扰的形式对雷达进行干扰,干扰极化参数用极化角描述如式(4)所示。其它参数设置如表1 所示。

表1 计算机仿真参数设置

式中,表示目标的极化;h表示干扰的极化。
图3 为拖曳式诱饵极化滤波仿真结果,可以看出,存在拖曳式诱饵时,目标所在距离单元为第133 个,诱饵所在距离单元为第173 个,此时需要对假目标参数进行估计,进而利用极化鉴别器对假目标诱饵进行鉴别,最后利用极化滤波器对假目标进行抑制从而获得目标的位置,角度等信息。在能够比较精确估计诱饵的极化参数的前提下,能够对诱饵假目标进行有效的抑制,目标能量得到了保持,在目标与诱饵极化参数趋近正交的情况下,还会产生1~3 dB 的目标信号增益,统计信干比提高了30 dB 以上,大幅度提高了目标检测性能。

图3 拖曳式诱饵极化滤波
3 室内半实物仿真校验
针对拖曳式诱饵有源干扰,进行了室内半实物仿真试验,并针对不同的干扰进行了相应的极化处理,得到了相应的处理结果。
1)噪声压制干扰极化信号处理
目标通过目标模拟器上位机进行设置,目标位置位于900 m。噪声压制干扰通过干扰机上位机进行设置,噪声功率设置-20 dB,噪声带宽为20 MHz。将目标信号通过垂直极化喇叭馈出,干扰信号通过45°线极化喇叭馈出,主动雷达导引头采用分时极化工作体制,接收目标和干扰机信号。处理结果如图4—6 所示
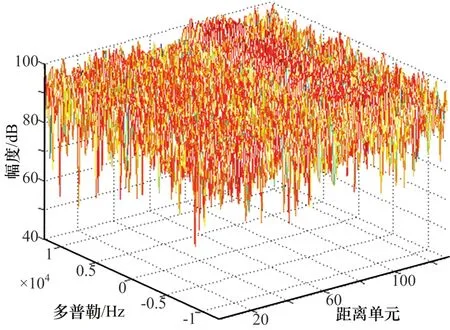
图4 信号脉压相参积累
通过图4 和图5 可以看出,利用目标与噪声之间的极化差异,设计相应极化滤波器,能够检测出淹没在噪声中的目标,目标位于第31 个距离单元。通过图6 可以看出,极化滤波处理可达到将近30 dB 的干扰抑制。

图5 极化滤波处理

图6 极化滤波处理(一维距离向)
2)独立假目标干扰极化信号处理
目标通过目标模拟器上位机进行设置,目标位置位于900 m。独立假目标干扰通过干扰机上位机进行设置,设置干信比为10 dB,假目标位置为1 050 m 处。将目标信号通过垂直极化喇叭馈出,干扰信号通过45°线极化喇叭馈出,主动雷达导引头采用分时极化工作体制,接收目标和干扰机信号。
通过对目标和干扰信号的极化相角和幅角估计,进行极化鉴别处理,判断真假目标,并针对假目标设计极化滤波器,图7 为极化滤波处理前后的一维距离像结果,从图中可以看出,经过极化滤波处理,可以将假目标滤除,剩余真目标信息,干信比提升30 dB 左右,有利于目标检测。

图7 极化滤波处理(一维距离向)
3)阵列假目标干扰极化信号处理
目标通过目标模拟器上位机进行设置,目标位置位于900 m。阵列假目标干扰通过干扰机上位机进行设置,设置干信比为10 dB,假目标个数为40 个,起始距离150 m,终止距离2 000 m。将目标信号通过垂直极化喇叭馈出,干扰信号通过45°线极化喇叭馈出,主动雷达导引头采用分时极化工作体制,接收目标和干扰机信号。
图8 和图9 给出目标和混有阵列假目标的回波信号进行脉压和相参积累之后的结果,从图中可以看出,目标完全被阵列假目标淹没,在时频域无法区分检测。通过极化参数估计与极化鉴别后,进行极化滤波处理,能够有效抑制阵列假目标信号。由于阵列假目标信号是通过一个喇叭空馈,因此认为所有假目标信号的极化特征相同,如果多假目标是通过不同极化喇叭空馈时,可逐一对多假目标设计相应极化滤波器滤除干扰信号。

图8 阵列假目标相参积累

图9 极化滤波处理(一维距离向)
4 结束语
本文提出了一种基于极化滤波处理的抗拖曳式有源干扰方法,首先在分析拖曳式有源干扰机理的基础上,通过计算机仿真验证了其对目标检测的影响,进一步利用极化参数估计得到诱饵的极化参数,在输入干噪比5 dB 以上时,估计结果较为精确,能够做为下一步极化鉴别和极化滤波的设计基础,然后进行了室内半实物仿真,对噪声压制干扰和假目标干扰设计对应的单凹口极化滤波器进行极化抑制,抑制效果达到30 dB。