一种基于机器视觉检测受电弓升降弓时间及弓头位移曲线的新方法
2022-10-23王俊东周宁李艳张卫华
王俊东,周宁,李艳,张卫华
(1. 西南交通大学 牵引动力国家重点实验室,四川 成都 610031;2. 中国中铁二院工程集团有限责任公司,四川 成都 610031)
0 引言
受电弓作为列车受流的主要部件,其动态特性对列车的安全运行有着至关重要的影响[1]。随着列车运行速度的增加,如何有效地保证弓网间良好的受流质量显得尤为重要。而其中受电弓的升降弓时间和弓头位移曲线是反映受电弓状态的重要参数。为适应不同线路的接触网高度,受电弓的升弓高度一般在700 mm~2 400 mm范围内[2]。当受电弓在不同高度运行时,产生不同大小的气动抬升力,进而影响弓网间的接触压力,并影响弓网系统间的受流质量[3-5]。受电弓升降弓时间对于行车安全的影响也是巨大的。当受电弓升降弓过快时会对接触网和滑板有剧烈的冲击,将引起滑板的损伤或刮坏接触网;当升弓过慢将可能在行车时不能及时升弓受流而影响牵引力的恢复,也可能因没有及时降弓而造成受电弓损坏的事故[6]。YAO Y M等通过建立一种扩展的受电弓-接触网(PAC)接触碰撞模型,计算得到当受电弓抬升速度超过0.5 m/s时,弓网的接触力将超过250 N,必须将受电弓的升弓速度控制在0.4 m/s以下[7]。所以,对受电弓的升降弓时间和弓头位移曲线进行研究对保证列车安全运行有着重要意义。
目前大多数的弓网检测手段可以分为接触式检测和非接触式检测两种。接触式检测大多方式是通过安装在车顶的传感器或者检测车检测。例如日本主要将滑板磨耗和弓网离线作为检测重点,而德国主要利用安装于受电弓上的力传感器和加速度传感器检测弓网间的接触压力[8]。张文浩等基于光纤光栅传感技术设计了一种受电弓状态监测系统,实时检测弓网间的接触压力、受电弓运动状态以及滑板应力温度等[9]。谭梦颖等推导出弓头集中力与应变响应间的关系,基于光纤应变传感器测量弓头滑板的应变,进而测得接触力[10]。
近几年非接触式弓网测量技术发展迅速,其中KARAKOSE E等利用Hough变换检测出滑板和接触线位置,利用交叉点特征定位到接触点位置,进而得到弓网导高和拉出值信息,实现列车运行中的拉出值超限位置和数量统计[11];NA K M等通过相机和激光获取滑板接触区域图像,基于深度学习和图像处理方法测量滑板的磨损量和变形[12];袁欢等结合图像预处理、边缘提取、Radon变换和最小二乘法等方法提取视频图像中受电弓燃弧发生的目标位置[13];姜利基于机器视觉,采用最小二乘法计算出光伏电池片的位置误差[14]。
就目前现有的弓网检测方法来看,针对受电弓升降弓时间和弓头位移曲线的非接触式检测研究较少,且精度还有待提高。所以本文提出一种基于机器视觉检测受电弓升降弓时间和弓头位移曲线的方法,并利用地面试验进行了可行性验证。
1 检测原理
1.1 图像检测方法
本文主要是根据识别标记点的方式来检测受电弓的升降弓时间和弓头位移曲线,检测流程图如图1所示。根据受电弓结构特性,分别在受电弓的上下臂杆铰接处和上框架顶杆处打上标记点,标记点形状如图2所示。接下来利用图像处理技术检测受电弓在升降弓过程中的标记点位置。首先,基于标记点运动区域进行粗定位,减少计算时间,提高定位精度;然后利用模板匹配方法(template matching)进行目标跟踪和特征提取,精确定位到每一帧图像中标记点的位置;最后经数据分析得到受电弓的弓头位移曲线和升降弓时间。
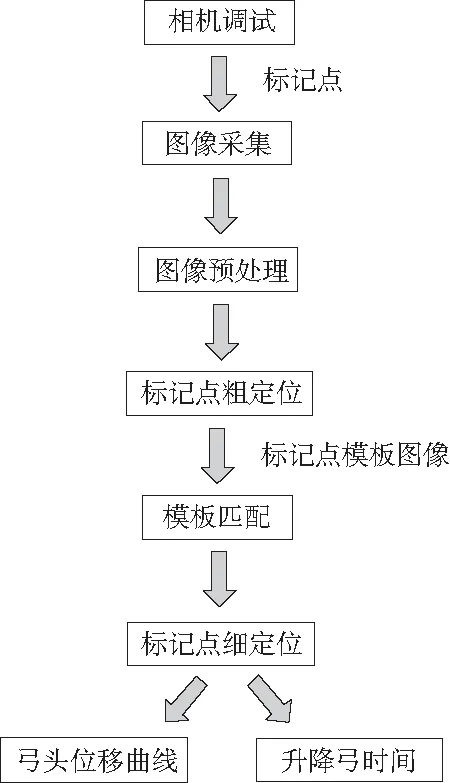
图1 图像检测方法图

图2 受电弓标记点位置示意图
1.2 升降弓位移曲线计算原理
相机安装位置如图3所示,安装于受电弓的正前方或者正后方均可(根据相机安装位置选择标记点的方向)。

图3 相机安装位置
升降弓弓头位移曲线的计算方法原理如图4所示。图像的检测对象是受电弓滑板下的顶杆和转臂节点处的标记点,通过图像处理技术检测每一时刻标记点的垂向位置信息a、e,然后基于已知的上框架长度c和下框架长度d,就可以计算得到两个标记点的位置信息,从而可以得到受电弓的升降弓弓头位移曲线;其次,根据图像检测到的受电弓顶杆标记点的位置变化数据信息,通过升弓和降弓的阈值判定,即可得到受电弓的升降弓时间。
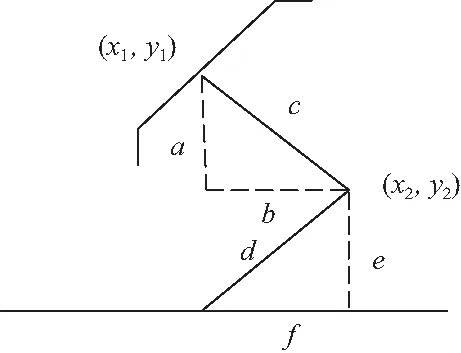
图4 计算原理图
2 升降弓地面验证试验
2.1 实验简介
为验证方法的可行性,本文进行了多组受电弓的升降弓地面试验,实验布置如图5所示。试验所采用的受电弓为单滑板受电弓,标记点打在上框架顶杆和转臂节点处。在受电弓滑板水平位置处布置一个CCD高速工业相机(分辨率:1 920×1 080,采样频率:50 FPS)采集升降弓视频,受电弓下方左右两侧的LED补光灯用于提高拍摄图片的质量。

图5 受电弓升降弓试验
2.2 相机标定
由于在本次实验中标记点的相对位移测量仅限于垂向方向的位移测量,所以可以简化相机标定方法,使用尺度因子相机标定法[15]。如图6所示,当相机光轴与结构平面法线在一条直线上时,尺度因子k的计算式为
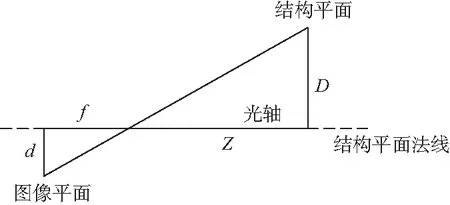
图6 尺度因子计算图
(1)
或者
(2)
式中:D为标记点的实际长度;d为标记点在图像中对应的像素数;f为镜头焦距;Z为相机到标记点的距离;dpixel为像素尺寸。
2.3 目标跟踪与特征提取
根据采集的图片数据和标记点尺度不变的特征,采用最高效的模板匹配方法(match template)识别标记点位移。模板匹配的算法思想如图7所示,将搜索模板T(m×n个像素)叠放在被搜索的图像S(W×H个像素)上平移,搜索图像上被模板图像覆盖的那块区域叫子图Sij。i,j为子图左上角在被搜索图S上的坐标,搜索范围是:1≤i≤W-m,1≤j≤H-n。
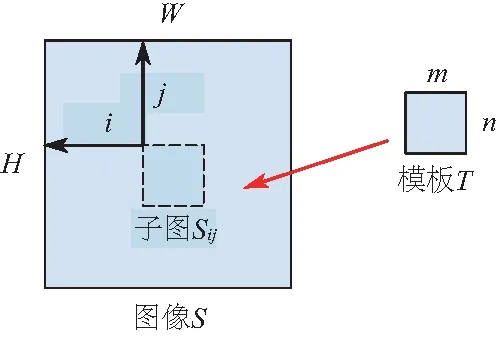
图7 模板匹配算法思想
通过比较T和Sij的相似性,完成模板匹配过程。衡量模板T和子图Sij的匹配程度,可用下列测度:
(3)
从公式中可以看出,中间第二项是一个常数,也就是只和模板有关系;第一项是模板覆盖下那块子图像的能量,它随(i,j)位置而缓慢改变。第三项是子图像和模板的互相关函数,随(i,j)变化而迅速改变。模板T和子图Sij匹配时这一项的值最大,因此可以用下列相关函数来反映匹配程度:
(4)
或者归一化为
R(i,j)=
(5)
但是这种原始的模板匹配算法计算时间较长,所以本文提出了一个粗精匹配结合的优化算法。首先,根据标记点的垂向运动趋势结合算法迅速锁定标记点的大致区域(图8),然后根据大致框定的匹配区域在附近逐一检索获得最佳匹配点,具体模板匹配过程在图9中给出。这样可大大降低整体匹配次数,且目标提取效果很好。通过数据对比(表1),采用粗精匹配结合的算法与直接采用模板匹配算法相比计算速度有大幅度提升,匹配时间由每张9.851 s缩减到每张1.385 s,计算效率提升了7倍。
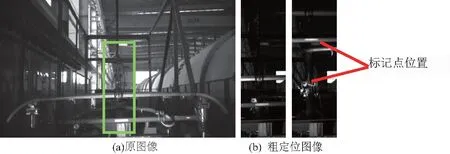
图8 原图像和粗定位图像

图9 标记点特征定位方法图

表1 标记点特征定位计算时间
3 试验结果及分析
3.1 升降弓弓头位移曲线识别结果
本文进行了多组动态地面试验,通过图像处理技术检测出的升降弓弓头位移曲线如图10所示(本刊黑白印刷,相关疑问请咨询作者)。且根据文献[16],通过动力学软件建立受电弓数学模型,得到弓头位移曲线的理论值,两者进行对比。从图中可以看出,通过图像处理技术完整地识别出了升降弓弓头的位移曲线,并且与数学模型计算出的理论值吻合度较好。

图10 升降弓弓头位移曲线对比
3.2 升降弓时间识别结果
受电弓开始升弓至升弓后保持平稳状态为一个完整的升弓过程,受电弓开始降弓至落弓后保持平稳状态为一个完整的降弓过程。根据识别出的弓头位置信息可识别出受电弓升弓和降弓过程,再利用相机采样频率可得到受电弓升降弓时间。根据计算出的升降弓时间与试验实测的参考值进行比较,统计结果见表2。

表2 升降弓时间统计结果 单位:s
由表2统计结果可以看出,本文方法识别出的受电弓升降弓时间与参考值比较接近,识别误差可控制在1 s以内。由以上实验数据可以说明采用非接触式的图像处理技术检测受电弓升降弓时间和升降弓弓头位移曲线的方法是有效的,能准确识别出升降弓状态。
由于试验场地限制的原因,试验时受电弓的升弓高度仅有600 mm,再去除由于受电弓转臂节点处的标记点被遮挡的220 mm,故本次试验有效的升弓高度为380 mm,但这并不影响判定此非接触式检测方法的有效性。
4 结语
本文提出了一种非接触式的基于机器视觉和图像处理技术检测受电弓升降弓时间和弓头位移曲线的新方法。与传统的检测手段相比,此方法智能化程度更高,安装方便,检测安全性高;而且不需要额外加传感器,避免影响受电弓的动力学性能。通过多组的地面动态实验,验证了此方法的有效性和准确性。检测得到的升降弓弓头位移曲线和升降弓时间较准确,进一步丰富了目前非接触式检测弓网状态的研究,同时可为受电弓部件检测和弓网间实时故障的监测提供数据参考。
考虑到目前受电弓组成部件的复杂性和前期由于标记点遮挡而无法识别的局限性,如何更加准确地识别复杂背景下的升降弓时间和弓头位移曲线,如何避免标记点被遮挡的干扰,将是后续工作研究的重点。
