基于动态逆的涡轴发动机自适应模型建模方法研究
2022-10-23夏天乾徐植桂吴金栋汪勇
夏天乾,徐植桂,吴金栋,汪勇
(1. 中国航发动力控制系统研究所,江苏 无锡 214013;2. 南京航空航天大学 江苏省航空动力系统重点实验室,江苏 南京 214016)
0 引言
如何更好地建立涡轴发动机自适应模型是实现性能寻优控制、模型预测控制及在线故障诊断等先进控制技术的基础与前提[1]。一个良好的涡轴发动机自适应模型不仅可以准确表达发动机额定工作下的系统动态,而且需具备实时反映发动机服役期内部件退化对发动机性能影响的能力[2]。
近年来,随着神经网络与深度学习的快速兴起,促进了基于数据驱动的涡轴发动机机载自适应建模方法的进一步发展[3]。然而,随着服役时间的延长,涡轴发动机各部件不可避免地发生退化,造成发动机的关键性能参数出现明显偏差;此外,考虑到发动机部件退化因子无法直接测量获得[4],因此有必要在快速、准确估计发动机退化情形的基础上,构建高保真的涡轴发动机自适应模型。
自卡尔曼(Kalman)估计方法出现以来,以Kalman滤波估计器为核心,根据发动机实测状态量的变化估计发动机性能退化的自适应建模方法应运而生,出现了很多相关的应用成果[5]。LUPPOLD R等[6]率先提出了基于卡尔曼滤波思想的发动机自适应建模方法,根据可测输出实时估计发动机性能退化因子。为弥补线性卡尔曼估计方法只能用于小范围的缺陷,SAAB S S采用拓展卡尔曼滤波的方法[7],通过在线拟合发动机的状态变量模型,实时求解卡尔曼增益矩阵,拓宽了卡尔曼估计技术的适用范围。显然这种处理给控制系统设计、计算都带来较大的复杂度。此外,POURBABAEE B等[8]采用多模型混合卡尔曼滤波器实现对燃气轮机传感器的故障检测、隔离和识别,可准确检测发动机故障。张海波等提出了一种基于机载非线性发动机模型,且具有输入端积分补偿的卡尔曼滤波器估计器的发动机自适应模型设计方法[9]。鲁峰等提出了一种基于容积跟踪滤波器的涡轴发动机自适应部件级仿真模型构建方法,自动修正各部件的流量和效率特性图,以进行部件气动热力参数计算[10]。然而,发动机的强非线性特性导致以Kalman滤波为核心的发动机自适应模型难以完全跟踪实际发动机的输出。基于此,肖玲斐等[11]结合滑模控制理论,设计滑模控制器,提出基于误差反馈滑模控制的航空发动机自适应线性动态模型设计方法。但滑模控制量的切换幅度越大,抖动越明显。在精确度要求较高的航空航天领域,这种抖动存在影响系统响应品质的可能。
综上,本文为弥补现有技术研究的不足,提出一种基于动态逆的航空发动机自适应建模方法。
1 基于动态逆的自适应模型
动态逆作为一种多变量控制结构[12],可对控制变量进行动态特性处理,以达到期望的特性,能对复杂的耦合非线性问题进行解耦控制[13-14],因此在飞行控制等领域发挥着重要的作用。接下来介绍基于动态逆的健康参数估计方法。
1.1 基于动态逆的健康参数估计器
实现动态逆的前提是获取能实时表达发动机工作特性的数学解析式。而对于涡轴发动机而言,通常可采用状态变量模型近似表达发动机的非线性动态特性。额定状态下,涡轴发动机状态变量模型的表达形式为

(1)
一般情况下,上式的控制输入向量u包括旋翼总距θ0与燃油流量Wfb。而当发动机性能发生退化时,通常可用部件效率和流量特性与设计值的偏差来表征发动机的健康情况。因此,为了基于动态逆实现对涡轴发动机健康参数的实时估计,输入向量u中还需包含部件的健康参数。由此可得基于动态逆的健康参数估计器表达式为
u=(C·B)-1·[λ-(C·A)x]
λ=K·(yreal-y)
(2)
式中:yreal代表真实涡轴发动机的可测参数;K为线性控制器的增益矩阵。若C·B非方阵时,可采用广义逆或加号逆代替。由上式可知,当状态变量模型的输出可实时跟踪真实发动机的可测输出时,动态逆即可实现对发动机部件健康参数的最优估计。
1.2 基于神经网络的涡轴发动机机载模型
Back Propagation(BP)神经网络作为一种根据误差逆向传播算法训练的多层前馈网络[15-16],可在未知系统工作属性的前提下,学习、存储大量的输入-输出映射关系,是目前应用最为广泛神经网络模型之一。因此本文采用BP神经网络离线训练获得涡轴发动机机载模型。
为了使机载模型能更准确地反映原发动机的动态特性,采用非线性自回归滑动平均模型结构。设涡轴发动机机载模型为2阶系统,以历史时刻的发动机控制量、健康参数、发动机的相关可测状态参数以及当前时刻的发动机控制量、健康参数为输入,当前时刻发动机状态参数为输出,如下式所示。
(3)
式中:M、Y分别为航空发动机机载模型的输入、输出向量;m为各向量中的元素;n为输入向量的维数;r为输出向量的维数;k为当前时刻。
2 仿真验证
结合上述原理,可得基于动态逆的涡轴发动机自适应模型结构如图1所示。图1中自适应模型由涡轴发动机、基于增量式动态逆的健康参数估计器、基于神经网络的涡轴发动机机载模型三部分组成。其中,涡轴发动机机载模型可离线获得。由图可知,在单个仿真步长内,发动机健康参数估计器根据涡轴发动机的可测状态参数与涡轴发动机状态变量模型的状态量,实时估计发动机的健康参数,并传递至涡轴发动机机载模型,一起构成涡轴发动机的自适应模型。
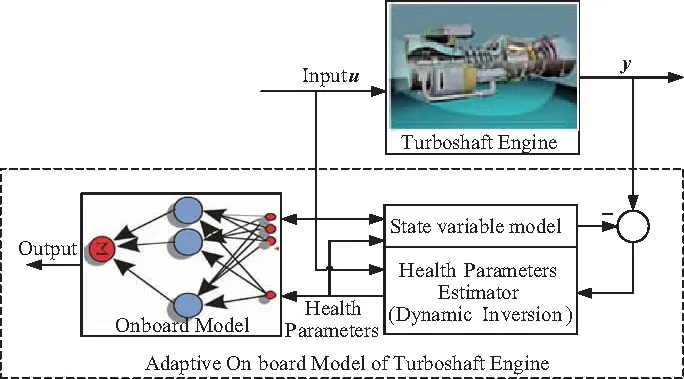
图1 机载自适应模型结构
假设仅考虑压气机、燃气涡轮的效率发生退化,则涡轴发动机机载模型表达形式如下:
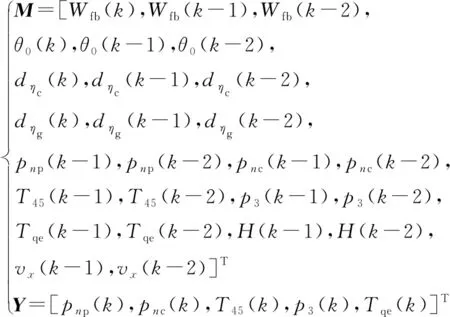
(4)
式中:k为当前时刻,是指当前周期的数据;k-1、k-2为历史时刻,是指上周期和上上周期的数据;输入量为历史时刻的燃油流量Wfb、旋翼总距θ0、压气机效率健康参数dηc、燃气涡轮效率退化系数dηg、动力涡轮相对转速pnp、压气机相对转速pnc、动力涡轮出口温度T45、压气机出口压力p3、发动机输出转矩Tqe、飞行高度H、前飞速度νx以及当前时刻的Wfb、θ0、dηc、dηg;输出量为当前时刻的pnp、pnc、T45、p3与Tqe。因此,整个涡轴发动机机载模型包括26个输入、5个输出。机载模型相对测试误差如图2所示。由图可知,各输出参数相对误差均<0.1%,精度较高,满足要求,可用于构建涡轴发动机机载自适应模型。
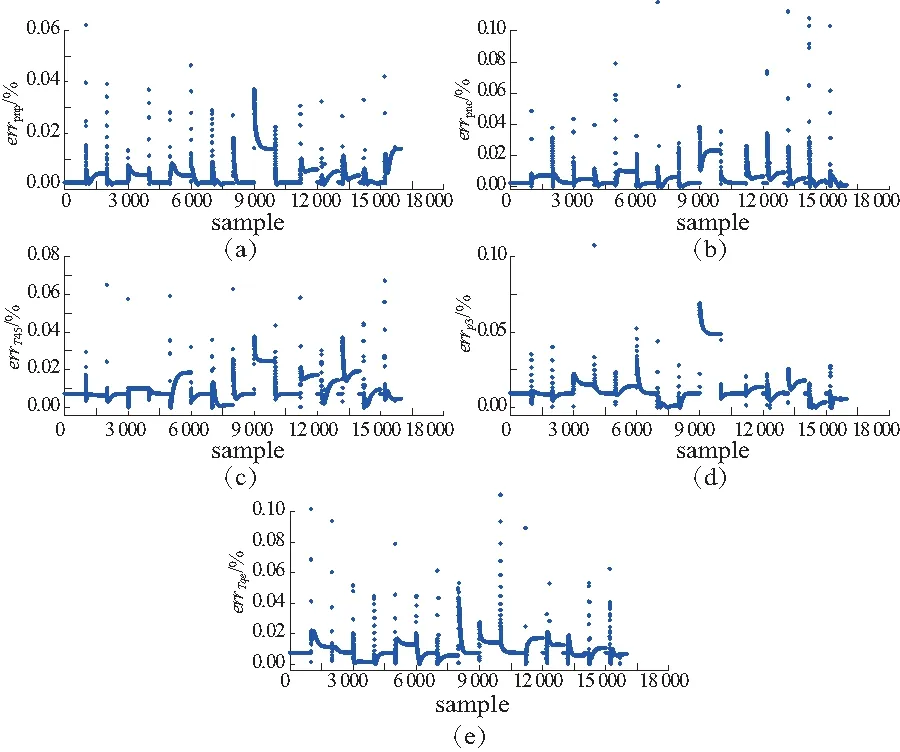
图2 机载模型相对测试误差
接下来在典型飞行任务下进行基于动态逆的涡轴发动机自适应模型仿真测试,并与基于线性卡尔曼滤波器的自适应模型进行对比,结果如图3所示。其中,直升机飞行高度H=200 m,前飞速度νx=12 m/s,旋翼总距为9°,t=10 s时,压气机、燃气涡轮的效率同时退化1%。
由图3(a)、图3(b)可知,无论发动机是否工作于额定状态,线性卡尔曼滤波器与基于动态逆的健康参数估计器均能实现对压气机、燃气涡轮效率的实时估计,且稳态估计误差保持一致。而如图3(h)所示,采用线性卡尔曼滤波器估计发动机健康参数时,单步耗时基本大于基于动态逆的健康参数估计器,后者可使总时间消耗有效减小26.2%((0.137 8-0.101 7)/0.137 8×100%)左右,在精度近乎一致的前提下,显著提升了估计健康参数的实时性能。此外,由图3(c)-图3(g)可知,t<10 s时,涡轴发动机的健康参数均为0,发动机处于额定工作状态,此时自适应模型的输出结果与发动机的真实响应保持一致。而随着发动机服役时间变久,虽然压气机、燃气涡轮的效率发生退化,发动机处于非额定工况,工作状态发生显著变化。但基于线性卡尔曼滤波器与动态逆的涡轴发动机自适应模型的输出参数仍可很好地跟踪真实发动机的输出响应,且稳态误差均不超过0.5%。相比于前者,结合动态逆与神经网络的涡轴发动机自适应模型动态精度更高,变状态鲁棒性能更加优越。
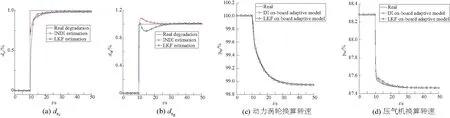
图3 机载自适应模型仿真结果
3 结语
本文进行了基于动态逆的涡轴发动机自适应建模方法研究,提出并建立了综合基于动态逆的健康参数估计器与基于神经网络的涡轴发动机机载模型的自适应模型,并在典型飞行任务下,进行了仿真对比验证,得到如下结论:
1)与线性卡尔曼滤波器相比,动态逆可在获得相同健康参数稳态估计精度的前提下,单步耗时更短,总时间消耗可有效减小26%左右,实时性更高;
2)相比于线性卡尔曼滤波器,基于动态逆与神经网络的涡轴发动机自适模型可实时跟踪真实发动机的输出响应,稳态误差不超过0.5%,动态精度更高,更有利于实现涡轴发动机变状态自适应跟随。
