基于D-H参数的ABB IRB2600机器人运动学分析与仿真
2022-10-23叶泉王建华
叶泉,王建华
(1. 南京机电职业技术学院 自动化工程系,江苏 南京 211306;2. 江苏省特种设备安全监督检验研究院 起重机检验中心,江苏 南京 210000)
0 引言
ABB IRB2600机器人为典型的6R工业机器人,该款机器人在搬运、上下料、弧焊等行业应用广泛,最高载荷达到了20 kg。对该款机器人进行运动学分析与仿真对于研究6R或者ABB品牌的工业机器人的运动学问题有重要的参考意义[1]。
正运动学和逆运动学组成了机器人的运动学问题,对这些问题的解决方法一般有D-H参数法和旋量法[2]。DENAVIT J等提出了D-H参数法,在此方法中机器人相邻坐标系i和i-1的关系可以用齐次变换矩阵的方法来描述[3]。目前对机器人逆运动学常见的解决方法有解析法、几何法、迭代法、几何解析组合算法以及符号与数值算法等[4]。
现以ABB公司的 IRB2600型机器人作为本文的研究对象,通过该型机器人的结构图样建立了基于D-H参数的变换坐标系和运动学矩阵[5]。运用编程建立IRB2600型机器人的运动学模型[6],并计算正、逆运动学模型结果,所建立的模型符合应用要求,可以对同型号机器人的研究起到支撑作用。
1 机器人结构参数
IRB2600机器人的结构尺寸如图1所示。根据D-H参数法分析机器人结构,找出各关节轴,将机械臂简化成连杆机构,并在每个连杆上定义一个固连坐标系,可得IRB2600机器人连杆坐标系,如图2所示。
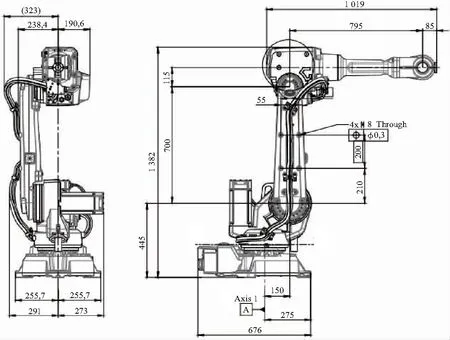
图1 IRB2600机器人的基本结构和装配图

图2 IRB2600机器人连杆坐标系
用以下4个参数来描述IRB2600型机器人:ai为沿xi轴从zi移动到zi+1的距离;αi为绕xi轴从zi旋转到zi+1的角度;di为沿zi轴从xi-1移动到xi的距离;θi为绕zi轴从xi-1旋转到xi的角度。由此得到IRB2600机器人D-H参数如表1所示。

表1 IRB2600机器人D-H参数
2 机器人的运动学分析

(1)
为表达简洁,以下将sinθi和cosθi分别记作sθi和cθi,将sin(θm+θn)和cos(θm+θn)分别记作sθmn和cθmn。根据表1中的D-H参数,机器人各连杆坐标系之间的变换矩阵如下所示。
(2)
(3)
(4)
(5)
(6)
(7)
将IRB2600机器人各个连杆坐标系相乘,可以得出一个新的变换矩阵。如下所示,为第6坐标系相对于第0坐标系的变换矩阵[8]:
(8)
式中:
nx=cθ1cθ23(cθ4cθ5cθ6-sθ4sθ6)-sθ1(sθ4cθ5cθ6+cθ4sθ6)-cθ1sθ23sθ5sθ6
(9)
ny=sθ1cθ23(cθ4cθ5cθ6-sθ4sθ6)-cθ1(sθ4cθ5cθ6+cθ4sθ6)-sθ1sθ23sθ5sθ6
(10)
nz=sθ23(sθ4sθ6-cθ4cθ5cθ6)-cθ23sθ5cθ6
(11)
ox=-cθ1cθ23(cθ4cθ5cθ6+sθ4cθ6)+sθ1(sθ4cθ5sθ6-cθ4cθ6)+cθ1sθ23sθ5sθ6
(12)
oy=-sθ1cθ23(cθ4cθ5sθ6+sθ4cθ6)+cθ1(sθ4cθ5sθ6-cθ4cθ6)+sθ1sθ23sθ5sθ6
(13)
oz=sθ23(cθ4cθ5sθ6+sθ4cθ6)+cθ23sθ5sθ6
(14)
ax=-cθ1cθ23cθ4sθ5+sθ1sθ4sθ5-cθ1sθ23cθ5
(15)
ay=-sθ1cθ23cθ4sθ5+cθ1sθ4sθ5-sθ1sθ23cθ5
(16)
az=sθ23cθ4sθ5-cθ23cθ5
(17)
px=-85cθ1cθ23cθ4sθ5+85sθ1sθ4sθ5-cθ1sθ23(85cθ5+795)+115cθ1cθ23+700cθ1cθ2+150cθ1
(18)
py=-85sθ1cθ23cθ4sθ5+85cθ1sθ4sθ5-sθ1sθ23(85cθ5+795)+115sθ1cθ23+700sθ1cθ2+150sθ1
(19)
pz=85sθ23cθ4sθ5-cθ23(85cθ5+795)-115sθ23-700sθ2+445
(20)
3 运动学仿真
3.1 正运动学仿真验证
为了验证所得D-H参数及运动学方程的正确性,利用RobotStudio对机器人进行正运动学仿真,在RobotStudio中创建的机器人工作站[9],设定任意给定theta1-theta4的4组关节角度,每设定一组角度,都在虚拟示教器中新建一个“robtarget”类型的数据,通过查看数据数值可以得知每组角度下机器人末端点的坐标。
运用MATLAB环境下的RoboticsToolbox工具箱,使用其中的Link和SerialLink函数建立IRB2600机器人的运动学模型。这里使用了SerialLink.fkine函数,在编程中该函数的调用方式:T=R.fkine(q)。其中R代表需要建立的机器人对象模型,q是关节角度向量,T是4×4的位姿矩阵。将上述4组关节角度向量代入正运动学fkine( )函数中,得到位姿矩阵T1-T4,进而得到机器人末端点的位置坐标。
由正运动学方程计算和利用RobotStudio控制系统中的数据得到机器人末端点位置坐标如表2所示,4组关节角度下的机器人数学模型如图3所示。由表2可知,计算和仿真得到的结果是一致的。由此可知机器人建模是正确的,且机器人正运动学分析正确。

表2 不同取值方式得到的机器人末端点位置

图3 4组关节角度下的机器人数学模型
3.2 逆运动学仿真验证
逆运动学仿真应用到函数SerialLink.ikine,反求各个关节的转动角度,调用格式:q=R.ikine(T)。其中R代表机器人对象,q是关节角度向量,T是4×4的位姿矩阵。将上述4组关节角度解出位姿矩阵T1-T4代入逆运动学ikine()函数中,得到关节角度向量q1-q4。
由逆运动学方程计算得到的机器人关节角度向量见表3。由表3可知,计算得到的结果经过换算和原设定关节角度是一致的。再次证实机器人建模是正确的,机器人逆运动学分析正确。

表3 逆运动学计算结果
4 轨迹规划仿真
在机器人运动期间,机器人控制器能获取关于目标位置和跟踪速度的稳定输入流。这种以时间函数形式对机器人位置进行的指定被称为轨迹[10]。关节空间规划、笛卡儿空间轨迹规划为机器人一般轨迹规划方法[11]。
选取IRB2600机器人可达空间中的两点,使用jtraj函数编程,并计算得到了该型号机器人的轨迹。选取的两点的关节角度为theta1=[0,-90,0,0,90,-180],theta2=[90,-100,40,10,60,-120] ,均匀采样50个点。
IRB2600机器人6个关节的运动曲线如角位移、角速度、角加速度等的变化可以使用软件绘制出来[12],如图4所示。通过绘制的图形可以看出,IRB2600机器人在运动过程中没有突然变速、停滞等现象,可知该型号机器人在生产应用中较少产生振动,磨损量小,设计是可以满足实际要求的。
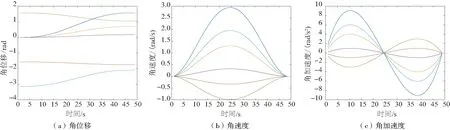
图4 IRB2600机器人轴1至轴6的关节运动曲线
5 结语
ABB公司的 IRB2600机器人为本文的研究对象,通过ABB公司的官方结构图建立了本型号机器人的连杆坐标系和D-H参数表,建立坐标系i相对于坐标系i-1的齐次变换矩阵。并利用MATLAB对该型号机器人的正、逆运动学问题进行了分析和运算,同时在RobotStudio中新建相应的工作站,并提取相同位姿下机器人角度和末端点位置坐标数据。通过对比,表明通过D-H参数在MATLAB中计算出的正、逆解数据和RobotStudio中仿真数据是一致的,证实本文的机器人连杆坐标系和D-H参数构建正确。通过MATLAB对IRB2600机器人进行轨迹的分析和仿真,验证了本文建立的IRB2600机器人的参数和矩阵的正确性,此理论基础可以为同类型机器人的研究提供重要的支撑。
