GPS-RTK 有无验潮模式同步进行水深测量研究
2022-10-21王志文雷力军
王志文,雷力军
(中交第一航务工程勘察设计院有限公司,天津 300220)
关键字:GPS 测量;GPS-RTK 无验潮模式;有验潮模式;水深测量
引言
水深测量一般采用验潮仪对水位进行控制,这种水位控制方法可以提供高精度的水位结果,但投放在水里的验潮仪容易出现移动、丢失、破坏、被泥沙掩埋等情况,导致数据丢失或不可用,无法有效对水深数据进行水位改正,导致水深测量数据失效,造成较大的经济损失。GPS-RTK 能提供三维坐标数据,目前已被广泛应用在多种测量工作场景中,其测量精度可达到cm 级。目前其应用场景主要集中在陆地测量,水深测量应用较少,出现这种情况的这主要原因是GPS-RTK 的工作有效半径较小,基本在在10 km 左右。但若在GPS-RTK 有效工作半径范围内,GPS-RTK 无验潮模式的水深测量可实时获取水面高程数据,从而可避免因无水位数据导致水深测量结果失效造成的经济损失[1-2]。为了提高工作效率以及避免经济损失,在GPS-RTK有效工作范围内进行水深测量时,可同时采用有验潮模式和GPS-RTK 无验潮两种模式进行水深测量,当验潮仪未被破坏时采用有验潮模式进行数据处理,反之采用GPS-RTK 无验潮模式进行数据处理。本文采用孟加拉某河道水深测量项目为依托,对其测量流程进行梳理和研究以及探明GPS-RTK无验潮水深测量结果的精度如何。
1 水深测量工作原理
1.1 有验潮模式水深测量工作原理
水深测量时将自容式潮位仪安装在专用验潮仪架中并置于水底,以防止观测过程中出现移动。为传算主验潮仪(从布设岸边的验潮仪中选取一个)零点高程,测量期间在主验潮仪处同时进行人工水位观测。测量完毕后,采用同步期平均海平面法传算验潮仪副站零点高程,进而计算各验潮站各时刻水位[3-4]。水深测量原理示意图可见图1 所示。

图1 水深测量原理示意图
H2表示静吃水,即换能器底端距海面的距离,可通过现场测量得到;
H3表示换能器底端距海低的距离,即测深仪的测量数据;
H4表示海底与海面之间的距离可用H2和H3表达,具体表达公式为H4=H2+H3。
测量结束后,根据验潮仪提供的水位数据W对测量得到的水深数据进行水位改正,从而得到海底高程h,可用公式表达如下:h=W-H4。
1.2 GPS-RTK 无验潮模式水深测量工作原理
水深测量时在陆地架设一台GPS 基准站提供差分信号,在测量船上安置一台GPS 流动站接受基站的差分信号,从而获取实时的坐标和高程[5-6]。根据示意图1 其工作原理可表达如下:
H1表示GPS 接收机天线到海面的距离,可通过现场测量得到。
H2、H3和H4的含义与上述相同。根据GPS接收机获取的实时高程数据H 可计算相应海底的高程h,其计算公式如下:h=H-H1-H4。
2 水深测量
我司在孟加拉博杜地区承担了某河道水深测量任务,测区距离河流入海口约17 km,属于感潮河段,潮汐影响水位变化可达2 m。为有效控制水位,减弱水位纵向落比差的影响,共布设5 个临时潮位站SC1、SC2、SC3、SC4、SC5,将SC3 作为主潮位站并设立人工水位观测站进行人工水位观测,用于引测其它各站潮位仪零点高程。
根据以往在孟加拉的工作经验,投放的验潮仪非常容易被破坏和丢失。为了避免因验潮仪丢失导致水深测量工作失效,以及按时向业主提交数据资料,我司采用GPS-RTK 无验潮和有验潮双模式水深测量同步进行的方法进行测量。本次水深测量使用中海达H32 型GPS 接收机、中海达HD370 型单波束测深仪和DCX-25PVDF 型自容式潮位仪。
2.1 坐标转换参数计算
为满足三维水深测量的需求,选取了位于河道两侧的四个三维控制点K1、K2、K3、K4 和3 个高程点C1、C2 和MJ,采用GPS 静态模式进行联测,进而解算了测区内WG4-84坐标和大地高到当地坐标以及高程的转换七参数。
2.2 测量船舶动吃水
船舶航行时,因水动力作用会出现船体升沉现象,这种现象会引起测深仪换能器吃水变化,其相对于静态吃水的变化量为船舶动态吃水。采用“RTK 定位法”测定测量船在工作船速状态下换能器位置动吃水改正数[7]。
2.3 测量海水密度
自容式潮位仪是测量海水总压力(水压与气压之和)的设备,其中海水密度ρ是影响潮位仪计算水深的重要因素。海水密度受水温、盐度等因素共同影响,在不同季节、不同海区有着较大差异。因此为快速有效获取本工程区域海水密度,用深度对比法(通过精准测量潮位仪入水深度反算海水密度方法)实际测量投放位置的海水密度[8]。
2.4 测深仪设置
在测深仪测量软件中进行坐标设置以及输入坐标转换七参数,并将测线导入到软件中。
2.5 水位控制
本次河道测量水位观测站均采用自容式潮位仪进行水位观测,自容式潮位仪是通过测量水压(包括大气压)变化计算获得水深数据的一种测量设备。根据水深测量进展情况进行水位观测工作,水位站观测时段信息见表1 所示。

表1 水位站观测时段信息表
1)水位观测
自容式潮位仪安装在专用验潮仪架中并置于水底,以防止观测过程中出现移动。数据采集时间间隔为10 分钟,整10 分钟时刻进行数据观测,时间系统采用北京时。同步验潮期间为消除大气压影响,同时进行大气压观测。为传算SC3 验潮仪零点高程,测量期间在SC3 处进行人工水位观测。
2)潮位站验潮仪零点高程求取及瞬时水位计算
根据潮位仪的观测值(水压和气压之和)、大气压观测值通过公式(1)计算各时刻水深值。

式中:h 为水深值;P 为水压观测值(水压和气压之和);Ap 为大气压观测值;g 为重力加速度(根据当地纬度与理论公式解算重力加速度,g=9.787565 m/s2);ρ 为海水密度(用深度对比法计算获得,ρ=1.020 kg/dm3)。
通过SC3 处人工水位观测值与对应的SC3 潮位站潮位仪的水深值,计算出该潮位站验潮仪的零点高程,从而计算得到该站各时刻水位。
以SC3 潮位站为主站,采用同步期平均海平面法传算潮位站SC1、SC2、SC4、SC5 验潮仪零点高程,进而计算各潮位站各时刻水位。
3)潮位站同步验潮数据分析
通过同步验潮数据,水位数据正常、无跳点、水位曲线圆滑且成正弦曲线。各潮位站之间的潮位差数据均相对于SC3 潮位站,见表2。
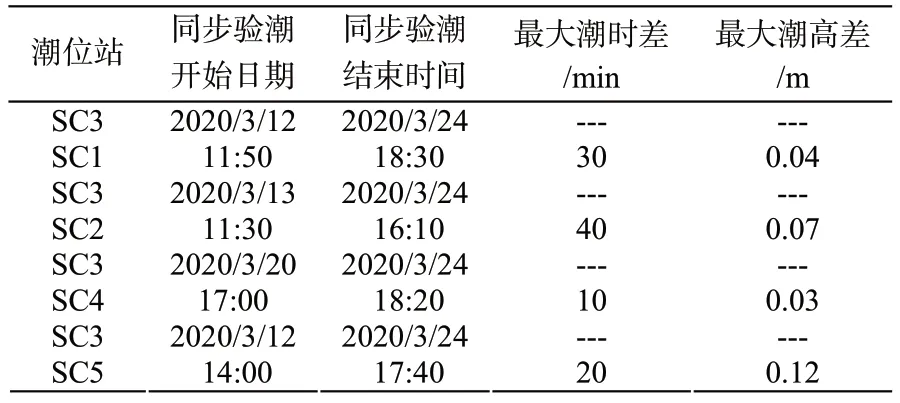
表2 潮位站潮时差及潮高差统计表
2.6 水深测量施测
测深仪换能器固定在船舷中部,量取换能器静吃水值并在测深仪采集软件中设置相应参数,GPS接收机天线固定在测深仪换能器顶端,保证测深点与测深定位点在同一垂线上。
水深测量时将GPS 接收机连接测深仪,启动测深仪中的电脑系统打开导航测深软件,在软件中进行坐标转换参数、声速等参数设定,待测深仪正常接收GPS RTK 信号后,启动测深系统同步采集测深点定位数据及测深数据,数据采集时间设定为北京时间。测深仪放置在驾驶室,船长按照测线行驶,测量人员监视测深及导航数据采集情况。测量过程中换能器安装杆无倾斜、升降现象,定位数据和测深数据连续可靠。
每个工作日于测深前后均利用校验板进行测深仪测深校正,实测各整米位深度,求出各整米位实际深度与实测水深的不符值,在数据处理时对水深数据进行改正,以保证测深数据精度。
3 数据处理
水深测量外业结束后,使用中海达的《水深资料处理软件5.50》进行水深数据处理,分别通过三维水深测量数据处理方式和水位改正数据处理方式,两种方式数据处理流程见图2 所示。
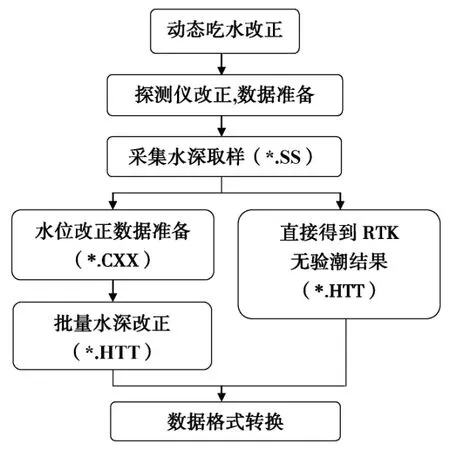
图2 数据处理流程图
为检查GPS-RTK 无验潮水深测量成果精度,与有验潮数据进行了水深数据对比,选取了三种不同类型的断面进行比较,见图3 所示。
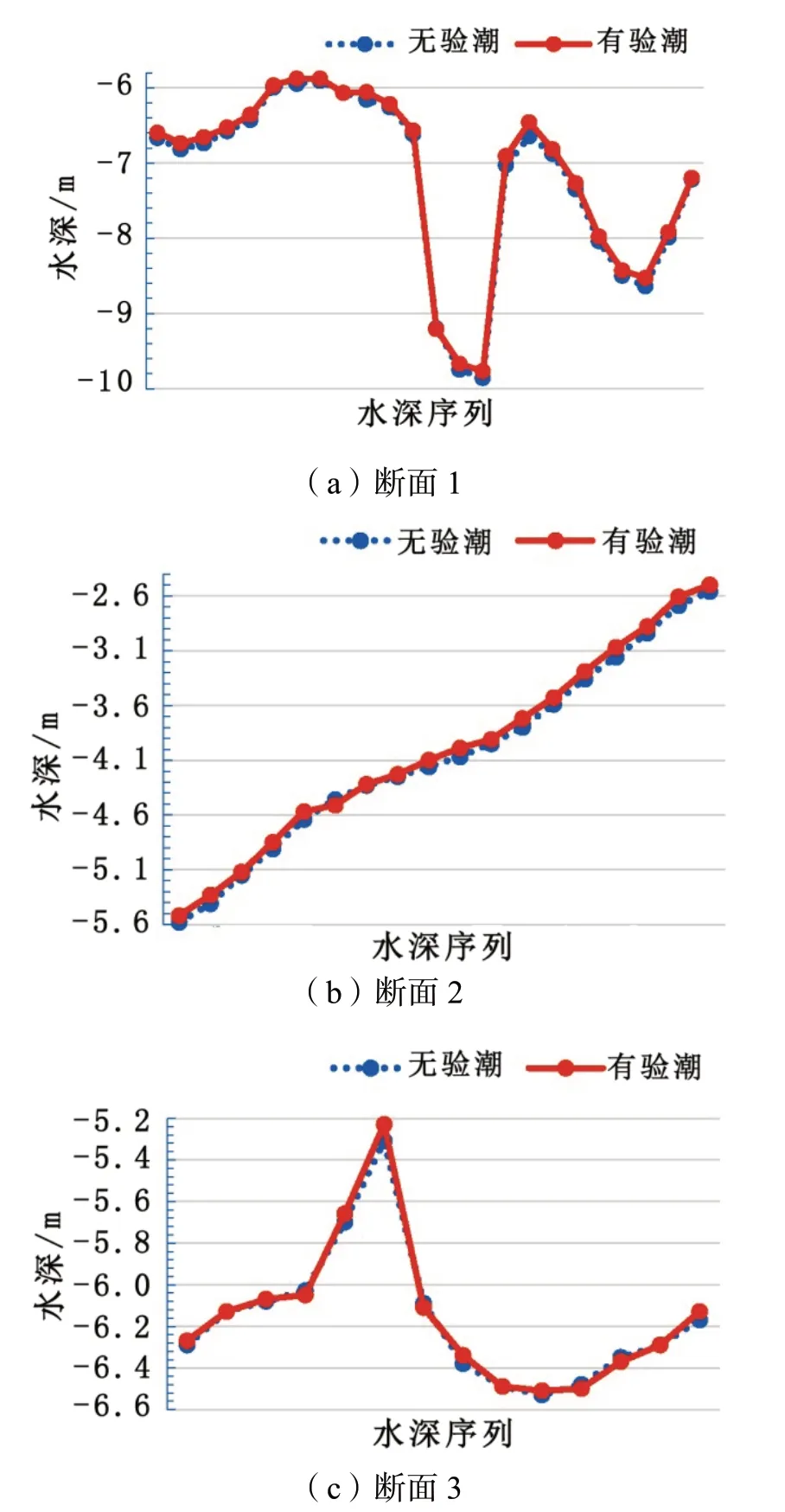
图3 两种测量模式对比图
通过图3 可以看出,两种测量模式得到的水深结果吻合度很好,水深结果在不同地形处的趋势一致。为进一步检验无验潮模式的测量精度,将所有同名点得到的两套高程值进行差值计算,将差值数据进行统计分析,具体结果可见表3 所示。

表3 两种模式测深结果比对表
根据表3 数据结果,表明两种测量方式具有良好的一致性,采用GPS-RTK 无验潮水深测量方式能够满足1:1000 及以上大比例尺的水深测量要求。
4 结语
采用有验潮模式的水深测量可以获得高精度的水位测量结果,但验潮仪容易发生丢失、破坏等情况,会导致测量工作的失效,需要重新补测,造成极大的经济损失。GPS-RTK 无验潮水深测量可实时获取水面高程,避免因缺少水位数据造成的经济损失。因此在GPS-RTK 有效工作范围内的水深测量可采用这两种测量模式同步进行,当验潮仪受到破坏时则采用无验潮的测量结果,既避免了经济损失又能按时提交测量数据。