基于EMG的手持式推杆清洁电器用户肌肉疲劳评价研究
2022-10-19范晓丽宋力强刘孟歆苗青杜红宇
范晓丽,宋力强,刘孟歆,苗青,杜红宇
(中国家用电器研究院 设计研究与评测中心,北京 100037)
1 引言
近年来,随着生活水平的提升,人们对健康品质生活的追求越来越高,清洁类电器产品得益于此,受到了人们的广泛关注[1]。特别是在新冠疫情和百年变局的交织影响下,人们已经习惯在充满不确定性的生活常态中,寻找新的平衡点,无论是更健康、安全的物质消费,还是居家隔离之后所催生出的消费场景,都促使家庭清洁观念在2020年发生了深刻变化,促进了清洁电器的高速增长[2]。其中,吸尘器和扫地机在国内市场发展多年,已经占据了清洁电器大部分市场份额,近年来消费者家居清洁多元化的需求使得洗地机的占比也在不断提升[3-4]。随着电机等技术日渐成熟,各个品牌的清洁电器的清洁、续航等性能严重同质化,传统的功能性产品已经不能够满足人们的生产与生活需要,而是更多的转向产品的舒适性、安全与高效性[5-6]。而以往关于清洁类电器的界面设计多从功能特性出发,并未将“人”的因素重点考虑在内,不符合人体工学的设计很容易产生体力疲劳,长期使用甚至会造成肌肉累积性损伤。因此,相关企业要想取得长久健康的发展,需要在产品设计中真正遵循“以人为中心”的设计理念,充分考虑人的生理、心理、行为以及运动力学等特征,最大限度的减少人在使用过程中的疲劳程度,促进清洁电器的人性化发展[7]。
以往关于疲劳的研究多采用的主观评价的方法,包括主观自评法和主观他评法。其中,主观自评法是最为常用的方法,一般通过调查问卷的形式来实现,如主观负荷评估技术量表(Subjective Workload Assessment Technique,SWAT)、日本产业卫生学会的《疲劳自觉症状调查表》等[8,11]。但是主观评价法存在评价标准不一,受个体差异影响较大,并且还存在人有意隐藏或夸大自己的真实感受或无法忍受疲劳的过程而胡乱涂鸦等诸多缺点[12]。EMG技术是人因工程研究领域的一种重要的研究方法,它主要通过人体骨骼肌表面电极采集记录肌肉纤维动作电位在时间和空间位置叠加的神经肌肉活动电信号,来表征肌肉活动和功能状态,与肌肉疲劳程度和收缩力等紧密相关,常被应用于局部肌肉活动水平和疲劳状态的检测与评价[13,18]。
综上,本文主要以手持推杆式吸尘器为研究对象,在分析吸尘器不同结构设计、功能特点以及具体使用情境的基础上,拟从人因工程学的研究角度出发,通过提取典型任务剖面制定实验任务,采集和分析人体在分别长时间使用不同界面设计的吸尘器过程中产生的EMG信号特征,同时结合主观评价方法,旨在获取可用于评价手持推杆式吸尘器特定清洁任务过程中的肌肉疲劳评价指标,为产品界面设计和迭代优化提供理论依据。
2 对象与方法
2.1 对象
本研究主要考虑吸尘器的机身重量、重心位置两个变量所导致的结构设计对人体使用疲劳程度的影响,故选取了5款样机作为研究对象,如图1所示,分别编号为样机1,样机2…,样机5。为了增加对照组,样机4和5分别是在样机3机身上半部分捆绑不同重量的水瓶实现。测量五款样机的重量、重心高度及把手高度,性能参数见表1所示。5款样机的把手高度基本相同,样机1、2和5的样机重量基本相同,样机1和2的重心在机身的下半部分,样机3、4和5的重心在机身上半部分。同时,为了避免品牌效应对实验结果的影响,在实验前需要利用封条对样机的品牌和型号进行遮盖。

图1 研究对象
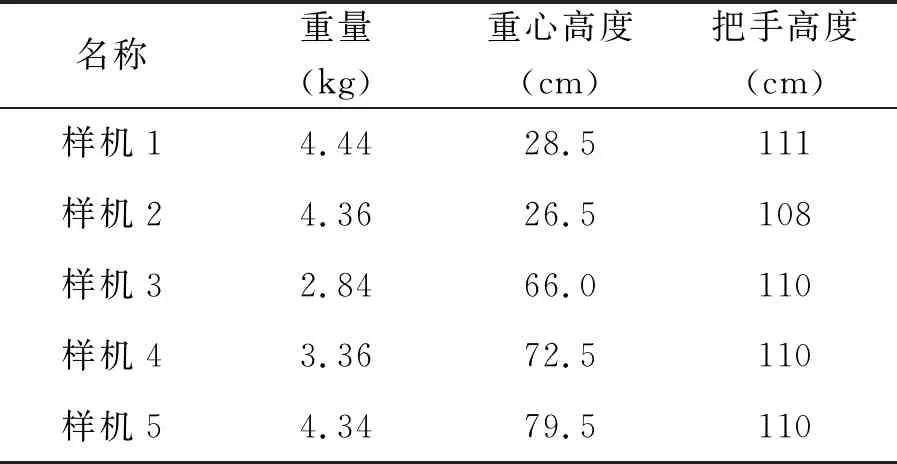
表1 五款样机信息参数
2.2 被试
实验选取10名受试者,男女比例1:1,年龄在20-40岁之间,身高在160-180 cm之间,体重在49-80 kg之间,均健康,无肌肉疾病和疲劳症状。受试者自愿参加实验,并填写书面同意书,完成实验后均向其支付一定的酬劳。受试者此前均有吸尘器的使用经验,且均为右利手,实验前两周无剧烈肌肉活动或肌肉损伤。
2.3 实验任务
研究用户使用手持式推杆吸尘器清洁地面的具体使用情境,提取典型任务剖面。同时,结合运动科学和人体生物解剖学,通过分析人体清洁行为过程获取参与运动的肌肉组织,作为EMG信号采集的部位选取标准。结合实验室现有实验条件、心理学实验设计的要求制定实验任务如下:
本实验任务采用5×5×5被试内设计(样机×肌肉×时间段),一共有5个任务组成,一个样机进行一次清洁任务。每个清洁任务要求:受试者站在原地并采用平时最舒适的姿势推杆样机,按照一定的频率重复推拉样机进行清洁任务,任务持续10 min,任务过程中每2 min需受试者结合自身的状态进行一次疲劳自评,自评量表主要依据Brog量表进行优化设计而成,见表2和3所示,从综合疲劳感受和局部肌肉组织分别进行打分。为避免疲劳累计效应对实验结果的影响,在每个任务结束后,受试者需休息5~10 min直至恢复到正常状态,同时为避免实验顺序带来的练习效应,受试者按照随机选择顺序依次进行5项任务。
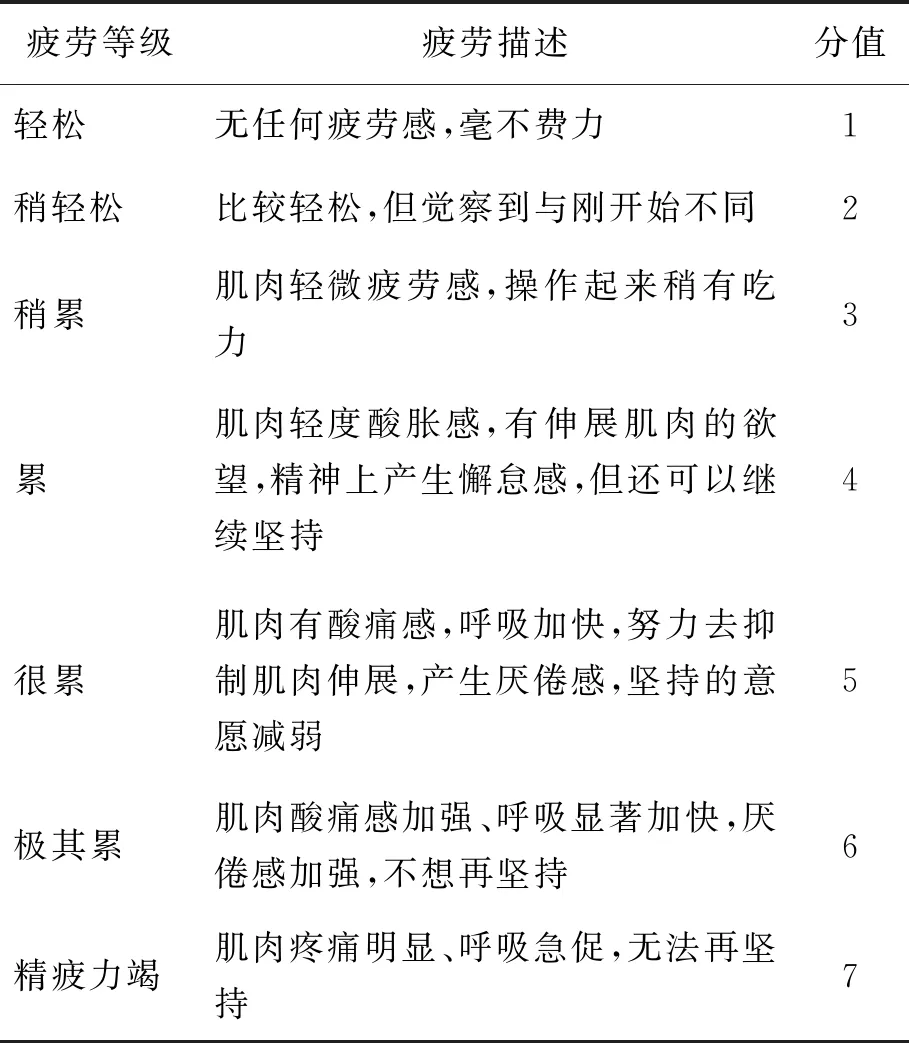
表2 综合疲劳程度自评量表
表3 局部肌肉疲劳程度自评量表
2.4 实验流程
实验被安排在周围环境电磁屏蔽和隔音效果良好且安静的实验室,环境温度控制为23-24℃,湿度控制在40-50%。进入实验室后,要求受试者将手机关机或静音,实验过程中不得使用手机。具体实验流程如图2所示,采集实验过程中的EMG信号数据和主观评价数据,图3所示为实验现场图。
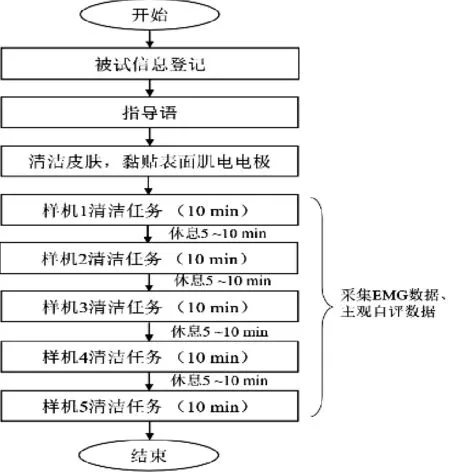
图2 实验流程图

图3 实验现场图
2.5 EMG信号采集
采用美国Delsys公司旗下的TrignoTMWireless EMG无线表面肌电仪进行EMG信号采集,主要采集部位为:桡侧腕屈肌、肱桡肌、肱二头肌、三角肌、斜方肌,采样频率为1 250 Hz。
EMG信号频谱集中在0-500 Hz间,主要频谱分布于20-150 Hz间,原始EMG信号在采集过程中不可避免的混入一些伪迹成分,如50Hz工频干扰、电极接触不良或者身体移动造成的各种伪差。在本文的研究中,通过设计巴特沃斯(Butterworth)滤波器实现20-150 Hz的带通滤波及50 Hz的带阻滤波,对采集到的原始EMG信号进行噪声伪迹去除。在滤波后的信号基础上,利用MATLAB计算EMG疲劳评价指标,本文拟选取两个时域特征参数:积分肌电(IEMG)、均方根振幅(RMS)和两个频域特征参数:平均功率频率(MPF)和中值频率(MF)。其中,频域特征参数的计算主要通过对肌电信号进行离散傅里叶变换基础上计算得到。
3 结果
3.1 主观分析
如图4所示为受试者在使用不同的样机进行清洁任务过程中,平均综合疲劳分值以及各局部肌肉组织的疲劳分值随时间变化的趋势图。从图中可知,随着时间的增加,受试者的综合疲劳感、各肌肉组织的疲劳感总体呈上升趋势,其中,样机5和样机4导致的疲劳程度更为明显。
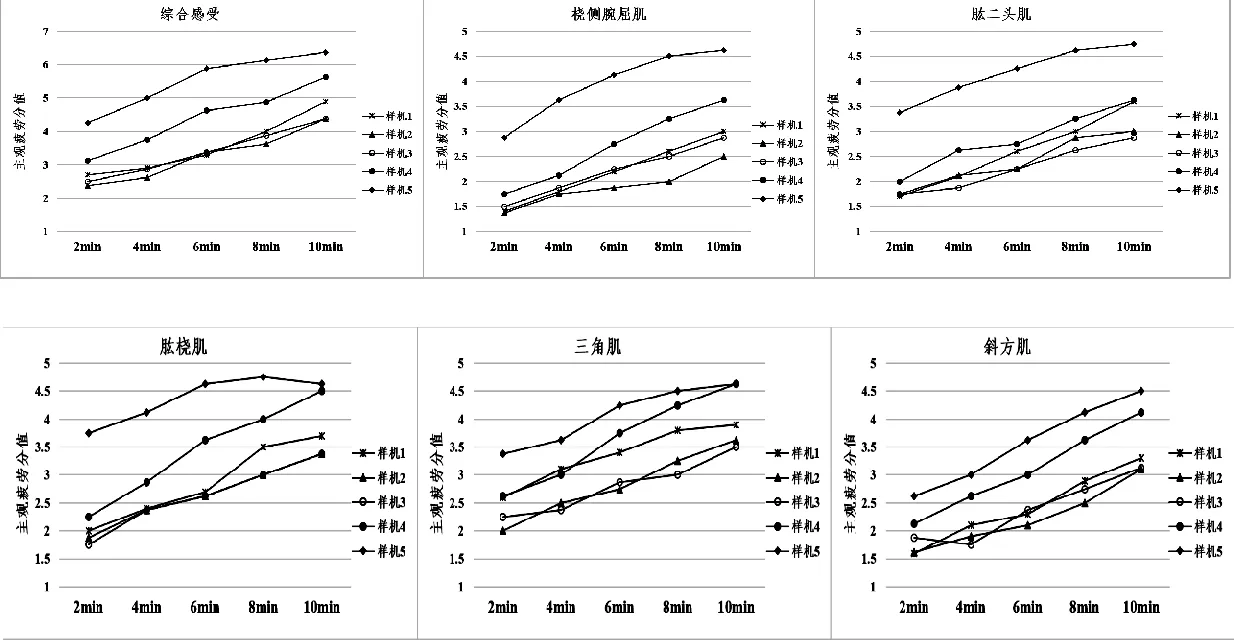
图4 主观疲劳分值的变化趋势图
3.2 EMG分析
每个样机清洁任务过程获取的EMG数据,以2 min为1个时间单位计算4个EMG特征值( IEMG 、RMS、MPF、MF),最后得到5×5×5(样机×肌肉×时间段)组EMG特征值。首先采用3σ准则对奇异数据进行剔除,然后对每块肌肉的4个特征值分别进行重复测量多因素方差分析(主体内因素:时间,主体间因素:样机),结果见表4、表5。图5所示为不同样机清洁任务过程中肱二头肌上各EMG特征值随时间变化的趋势图。
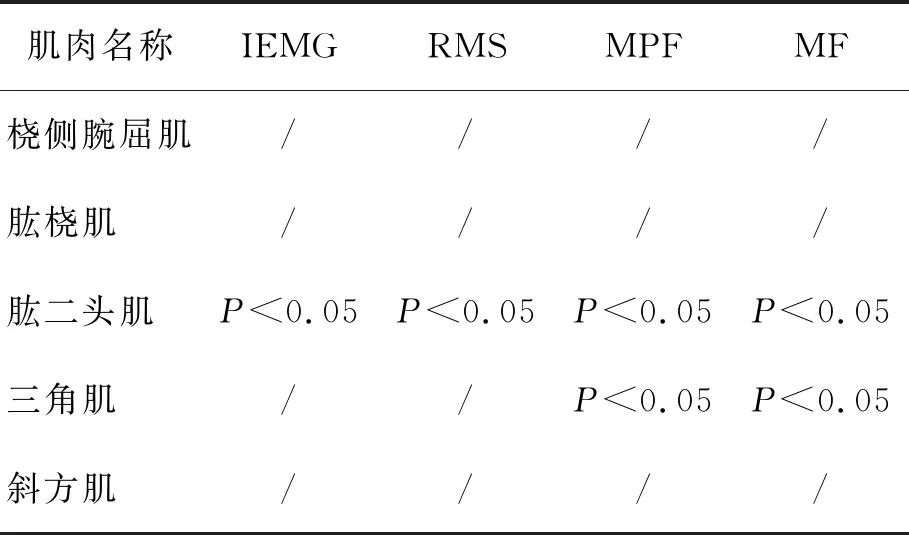
表4 EMG特征值在主体内因素上的差异性分析
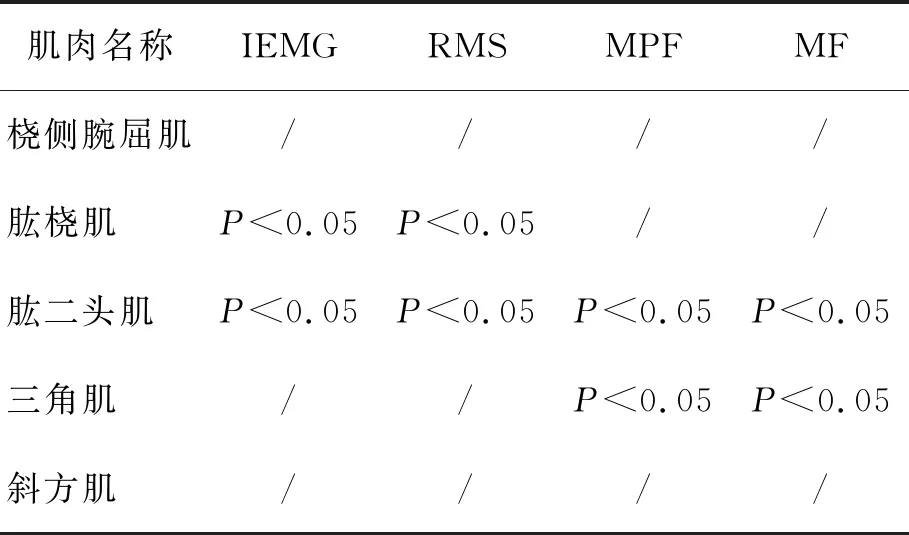
表5 EMG特征值在主体间因素上的差异性分析
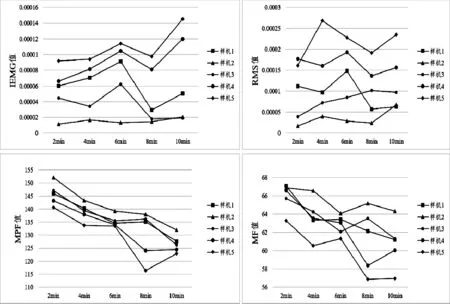
图5 肱二头肌上各EMG特征值随时间变化趋势图
综合表4、5和图5可以看出:对于桡侧腕屈肌和斜方肌,4个特征值随时间变化未发生显著性差异(P>0.05),不同样机之间的特征值无显著性差异(P>0.05);对于肱桡肌,从整体趋势上看,4个特征值随时间变化未发生显著性差异(P>0.05),但不同样机之间的IEMG和RMS值有显著性差异(P<0.05),LSD事后检验结果显示:样机5、4明显>其它样机;对于肱二头肌,IEMG 和RMS 随时间的增加显著增大(P<0.05),不同样机之间的IEMG 和 RMS值具有显著性差异(P<0.05), LSD事后检验结果显示:样机5>样机4>样机1=样机3>样机2;MPF和MF随时间的增加显著减小(P<0.05),不同样机之间的IEMG和RMS值有显著性差异(P<0.05),LSD事后检验结果显示:样机5>样机1;对于三角肌,从整体趋势上看, IEMG、RMS、MF随时间变化未发生显著性差异(P>0.05);但MPF随时间的增加显著减小(P<0.05);不同样机间的MPF具有显著性差异(P>0.05), LSD事后检验结果显示:样机5>样机2、样机3。结合主体间效应以及LSD两两样机的EMG特征值比较分析结果可知:5台样机在长时间的使用过程中,容易导致人体肌肉疲劳程度的强度由大到小依次为:样机5>样机4>样机1=样机3>样机2。其中,样机1和样机3从数据分析上尚无显著性差异,但从均值比较上,样机1在桡侧腕屈肌、肱二头肌、三角肌产生的IEMG和RMS均>样机3,三角肌的MPF和MF均<样机3,可以初步推断:样机1>样机3。
综上可知,肱二头肌上的四个EMG特征参数IEMG 、RMS、MPF、MF在长时间的清洁任务过程中均发生了明显的变化,即肱二头肌的EMG活动在吸尘器的清洁任务过程中对疲劳的敏感度最高。在此基础上,比较分析不同样机在长时间使用过程中所产生的人体疲劳程度,可推断不同样机使用体验优良的排序依次为: 样机2>样机3>样机1>样机4>样机5。
3.3 主客观一致性分析
为进一步验证肱二头肌上4个EMG特征参数IEMG 、RMS、MPF、MF可以作为肌肉疲劳评价的有效指标,本文采用Pearson相关性分析法对肱二头肌上的EMG特征值与主观疲劳评分值进行主客观一致性分析,结果如图6所示。从图中可以看出:IEMG、RMS与主观疲劳分值呈正强相关,MPF 、MF与主观评分值呈负极强相关性,即进一步验证了前面的结论。
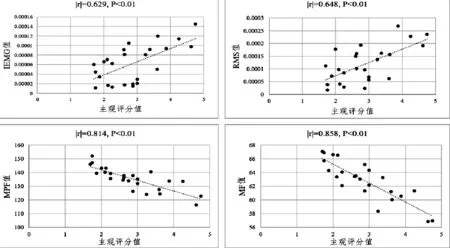
图6 Pearson相关性分析结果
4 讨论
本论文主要针对不同界面设计的手持式推杆吸尘器清洁任务下的肌肉疲劳评价展开研究,从主观评价结果来看,自重较大且重心位置在机身上半部分的样机更容易产生人体疲劳,但由于其受个差异影响严重,可信度较低,因此很难用来比较其他样机。因此,需要通过EMG特征来进行客观定量化的研究。从EMG分析结果来看,人在长时间使用吸尘器的过程中:
(1)不同肌肉组织对疲劳的敏感度不同,其中肱二头肌敏感度最高,其次是三角肌和肱桡肌,桡侧腕屈肌、斜方肌的EMG值在任务过程中虽然也有一定的变化,但未达到显著性变化。因此,本研究中,特定肌肉组织上的EMG特征值:IEMG、RMS、MPF 、MF 可以作为评价人体使用吸尘器疲劳的有效评价指标。
(2)随着样机使用时间的增加,IEMG、RMS的整体是呈现增大趋势,这是因为IEMG、RMS反映的是EMG信号在时域内的振幅大小,与肌肉发力呈正相关,随着使用过程中疲劳效应累积,为维持运动的所需力,神经系统调节使募集的肌肉纤维运动单元数量增加,因而EMG的波幅变大;对于不同的样机,使用所需的力越大(与样机重量、结构设计、自驱力等诸多因素有关),肌肉力越大,EMG的波幅越大。但发现随着时间增加,部分肌肉组织的IEMG、RMS值有局部下降趋势,这是因为在肌肉在长时间用力之后,人体达到较深程度的疲劳后,代谢产物在体内积累,神经系统无法维持募集足够数量的肌纤维活动,信号幅值出现下降趋势。
(3)随着样机使用时间的增加, MPF 、MF 整体呈降低趋势,是因为随着疲劳程度的加深,纤维运动单元动作电位传导速度降低,EMG信号频谱会发生左移,即低频段功率谱密度增加,高频段的功率谱密度降低,因而在肱二头肌和三角肌处会出现降低。
(4)5台样机人机交互界面的使用体验水平依次为: 样机2>样机3>样机1>样机4>样机5,经分析,样机1、样机2以及样机5比较,三者重量相当,但前两者重心位置远低于样机5,显然重心在上时形成费力杠杆,用户在使用过程中更容易疲劳。机1和样机3比较,虽然样机3重心位置大于样机1,但样机3的整体重量小于样机1,因而相比之下不容易产生疲劳。样机1和样机2比较,自身重量和重心相当,但是样机2更加不容易疲劳,是因为样机在设计过程中使用了自我驱动力,用户使用更加省力。
5 小结
本论文主要通过表面肌电技术对用户长时间使用手持式推杆清洁电器所诱发的肌肉疲劳进行检测和评价,从而形成一种可广泛应用于清洁电器人机交互界面舒适性评估的通用量化方法,具有重要的研究价值。将表面肌电信号技术应用于家电的用户体验评价,通过客观可视的数据填补了清洁电器舒适性评估无客观测试数据的空白,量化了手持式推杆式清洁电器疲劳度和舒适性,引领行业新型评测方式。