移动无线物联网感知层传感节点定位算法研究
2022-10-19刘仲驰
刘仲驰
(江西制造职业技术学院信息工程系,江西 南昌 330095)
移动无线物联网在生物攻击监测、洪水监测以及人体健康监测等多个领域得到广泛的应用[1-2]。作为一种全新的技术,其感知层中传感节点的定位面临着全新的挑战[3]。
文献[4]将需要定位节点的数据报文拆分为三部分,分别是坐标、跳数、ID,通过三角定位方法实现了移动物联网节点坐标感知,该算法降低了节点坐标乖离程度,但是该方法受跳数影响较大,导致传感节点定位精度有所下降。文献[5]介绍了一个基于物联网的无线传感器网络的开发和实验,该网络用于墨西哥科里马·维拉·德尔瓦雷斯市区的水文气象数据收集和洪水监测。该网络旨在收集河流水位、土壤湿度和天气参数,这些参数通过3G和Wi-Fi网络使用物联网消息队列遥测传输协议实时传输到服务器和web应用程序。该网络在2019年热带气旋季节科里马地区发生的三次不同的热带风暴事件中进行了测试。结果表明,该方法可以准确收集极端事件期间的实时水文气象信息。但是该方法未针对网络中节点定位进行深入分析,因此其节点定位精度有待进一步考究。文献[6]提出了基于改进猫群算法的路由优化策略,综合考虑路径剩余能量方差等多种因素,提高了数据传输的实时性。但是该方法中未知传感节点到锚节点之间估计距离误差较大。
针对上述方法存在的缺点,提出了一种非测距的定位算法(DV-Hop算法)与位置修正方法相结合的感知层传感节点定位算法。通过最小跳数值的求解以及该值所在节点的位置转化修正,实现高精度的传感节点定位。
1 感知层传感节点定位算法设计
1.1 基于误差锚节点定位移动无线物联网系统模型
假设移动无线物联网感知层位置未知的节点(即移动无线物联网感知层待定位节点)和位置已知的传感层节点(即移动无线物联网感知层锚节点)组成。其中移动无线物联网感知层待定位节点的数量为n,下标组成的集合表示为N,移动无线物联网感知层锚节点的数量为m,下标组成的集合为M。设定移动无线物联网感知层二维平面内,节点i的参数表示为:

移动无线物联网系统的感知层待定位传感节点位置参数为θ=[θN,θM]λ。式中,θN和θM分别表示移动无线物联网感知层待定位传感节点与误差锚节点的位置参数,λ表示限定性阈值。
设移动无线物联网感知层节点在初始时刻即可定位成功的先验概率为:

式中:P0(¯θk|,θk)表示移动无线物联网感知层节点k的先验概率。
通常情况下,传统算法对移动无线物联网感知层传感节点进行定位研究中,通常会先假设移动无线物联网感知层传感节点的位置参数是准确的,因此不考虑定位先验信息对移动无线物联网系统的影响,此时,利用限定性阈值对其进行约束,并将待定位的传感节点的位置估计方差记为:

式中:表示移动无线物联网感知层待定位传感节点的位置估计。
式(3)的下界表示为J-1(θN),表达式如下:

式中:∇θN(·)表示对θN的一阶偏导算子,E表示节点i一跳之内的邻居节点距离,¯d表示移动无线物联网系统内获得的距离观测。
1.2 移动无线物联网感知层锚节点筛选
以图1所示的移动无线物联网拓扑图为基础,完成移动无线物联网感知层锚节点筛选。
图1中,M1~M4表示靠近移动无线物联网感知层未知传感节点U1的4个锚节点。在移动无线物联网感知层的二维平面上,未知传感节点U1至少需要选择3个锚节点,以确定自己的位置信息[7]。
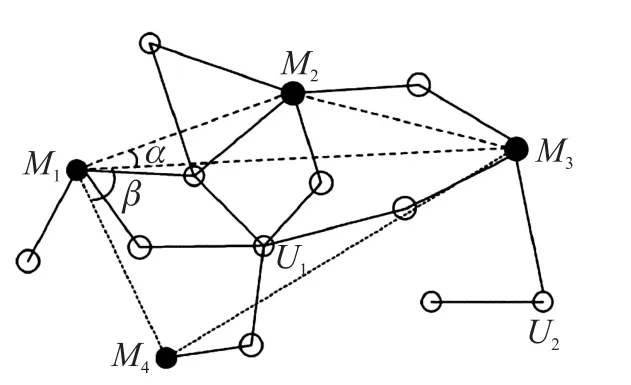
图1 候选锚节点的选取
将锚节点M1~M4组成的三角形内角α约束条件设定为:

式中:M1M2表示(M2M3)和(M1M3)2个锚节点之间的距离。
设移动无线物联网感知层中3个锚节点的共线度为:

式中:αi表示由上述3个锚节点构成的三角形内角。
当3个候选锚节点的共线度DC=π时,说明移动无线物联网感知层中的3个节点共线。当3个候选锚节点的共线度DC=π/3π,定位误差最小,为了判断其是否共线,需要预先设定一个阈值C(0<C<0.5)。当未知传感节点接收到N′个锚节点的路由信息后,首先计算与未知传感节点距离最近的3个锚节点的共线度,当其共线度满足式(7)条件时,求解其位置信息;否则,DV-Hop算法自动选择距离U1次近的另一个锚节点M4代替M3作为候选锚节点,直到共线度满足式(7)的条件[8]。

1.3 移动无线物联网感知层未知传感节点的平均跳距计算
在计算移动无线物联网感知层未知传感节点的平均跳距前,首先分析锚节点的可信度。移动无线物联网感知层未知传感节点U1与锚节点M1~M4相连通,U1与锚节点M3和M4的连接近似于直线,但与锚节点M2的连接较为曲折,如图2所示。
以图2为基础,按照式(8)计算平均跳距。
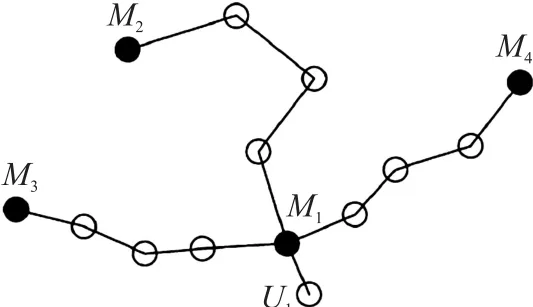
图2 平均跳距的可信度计算
式中:hj表示移动无线物联网感知层中锚节点i和节点j之间的跳数。
由于未知传感节点U1与锚节点M2的连接较为曲折,导致锚节点M2参与计算导致平均跳距比实际偏小[9],因此提出一种移动无线物联网感知层锚节点信任度计算方法。
已知移动无线物联网感知层共有m个锚节点,设锚节点i与其他m-1个锚节点的单条路径平均跳距为HSij(i≠j),HSij(i≠j)和锚节点i之间归一化处理后的总平均跳距偏差程度表示为信任度[10],具体计算方式如下:
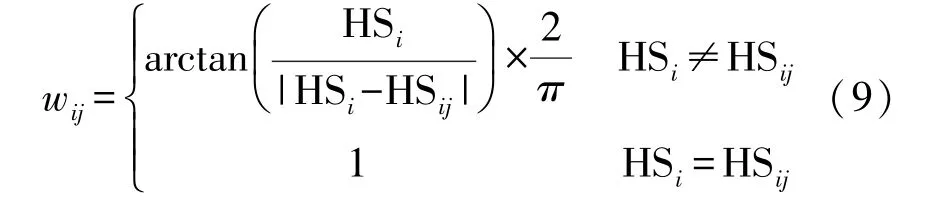
从式(9)可以看出,当HSij与HSi的偏差较大时,可信度wij的值较小,说明移动无线物联网感知层锚节点在i和j的单条路径上比较曲折,导致平均跳距计算误差较大。
采用三边测量估计移动无线物联网感知层未知传感节点位置时,默认移动无线物联网感知层参与计算的3个锚节点的可信度相同。当移动无线物联网感知层未知传感节点接收到多个锚节点的平均跳距信息后,首先选择离未知传感节点最近锚节点的平均跳距为参考,然后根据其他锚节点的可信度进行加权平均[11]。
图2中未知传感节点U1接收到4个锚节点的平均跳距分别为HS1~HS4,M1离未知传感节点U1最近,M2~M4相对M1的可信度分别为w21,w31,w41,则移动无线物联网感知层未知传感节点U1的平均跳距计算公式如下:

在获取HSU1之后,将其与移动无线物联网感知层未知传感节点U1与各个锚节点之间的最小跳数相乘,得到未知传感节点U1和候选锚节点之间的距离,然后运用式(8)计算未知传感节点U1的位置[12]。
1.4 移动无线物联网感知层未知传感节点的位置修正
将通过DV-Hop算法所得定位结果精度足够高的传感节点转化为锚节点,以此为依据,完成其他未知传感节点的定位[13]。
通过三边测量法获得移动无线物联网感知层未知传感节点U1的由锚节点M1、M2、M4所确定的位置信息,其定位的误差分析如下:
将未知传感节点U1移动后与任意一个锚节点M1进行身份互换,然后根据另外两个已知的锚节点M2和M4估算M1的位置,即移动后节点的位置。
假设移动无线物联网感知层锚节点M1的实际坐标位置表示为(x,y),移动后的估算坐标位置表示为(x′,y′),移动无线物联网感知层传感节点之间的通信半径表示为R,则归一化定位误差的计算表达式如下:

移动无线物联网感知层未知传感节点转化为锚节点的条件是:当节点定位的归一化误差满足小于e≤Ψ误差阈值时,即才可以将其转化为锚节点,从而参与无线物联网感知层其他未知传感节点的定位计算。
根据上述定位结果,对未知传感节点定位结果进行多次修正后与初始估计距离进行对比,如图3所示。
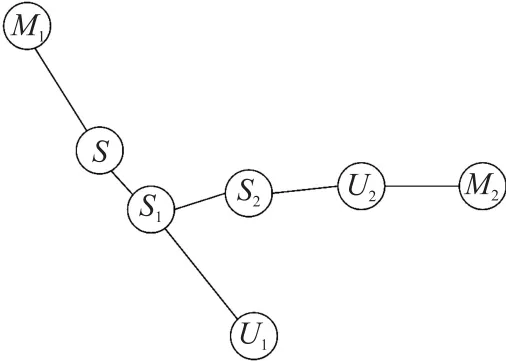
图3 未知传感节点位置修正示意图
图3中,S表示未知传感节点的初步定位位置;M1表示参与未知传感节点初步定位的m个锚节点之一;dM1S表示已定位未知传感节点初始位置S到锚节点M1的距离。
由于M1在S定位时只是起到了一部分作用,因此将位置S修正到如图3所示的S1的位置。

假设S、S1、M1的坐标分别表示为(a,b),(a1,b1)和(aM1,bM1),则:
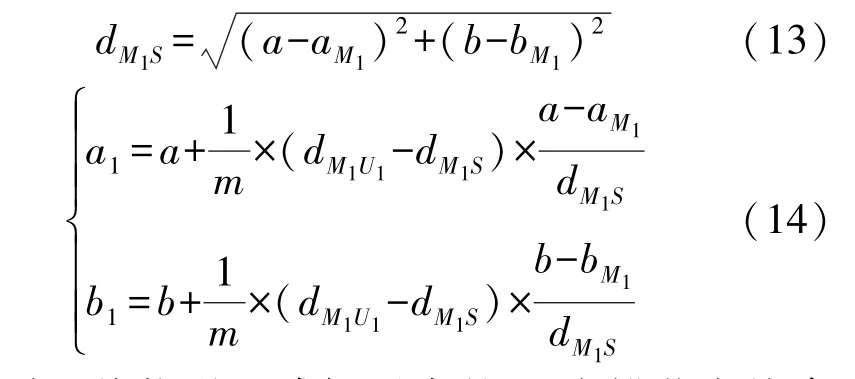
移动无线物联网感知层中的m个锚节点均参与了未知传感节点的修正后,此时定位的未知传感节点位置作为U1的最终定位结果。为了保证定位精度,可以多次循环修正未知传感节点S,循环修正到一定次数后,定位误差将趋于稳定。
2 仿真结果与分析
为了检验本文所提算法性能的优劣。分别对文献[4]算法、文献[5]算法和本文算法进行仿真对比。主要从定位误差方面进行对比。
2.1 仿真参数设置
在仿真前,首先设置移动无线物联网网络结构相关参数。此次移动无线物联网中共有300个节点,其通信半径为100 m,且随机分布在200 m×200 m的正方形区域中,网络中所有节点均采用泛洪的方式在传播信息。图4为部分移动无线物联网传感节点的随机分布图。
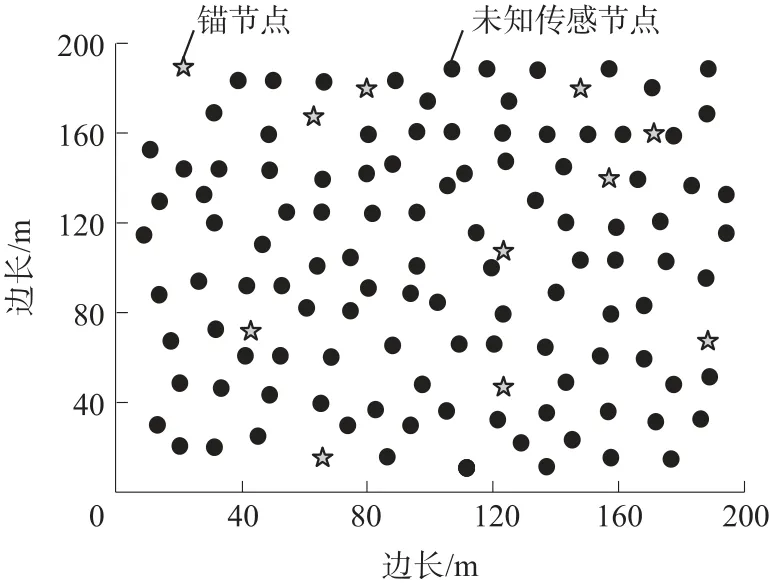
图4 移动无线物联网中节点随机分布图
以图4为基础,利用未知传感节点实际估测位置与其真实值之间的距离表示每个未知传感节点的定位误差,其计算公式可表示为:
2.2 结果与分析
将移动无线物联网感知层未知传感节点和锚节点之间的跳数设置为l=0,以不同初始锚节点数量作为输入,锚节点数量取10进行测试。在测试中对文献[4]算法、文献[5]算法和本文算法反复测试50次,取平均值,并与未知传感节点的实际定位进行误差对比,测试结果如图5所示。
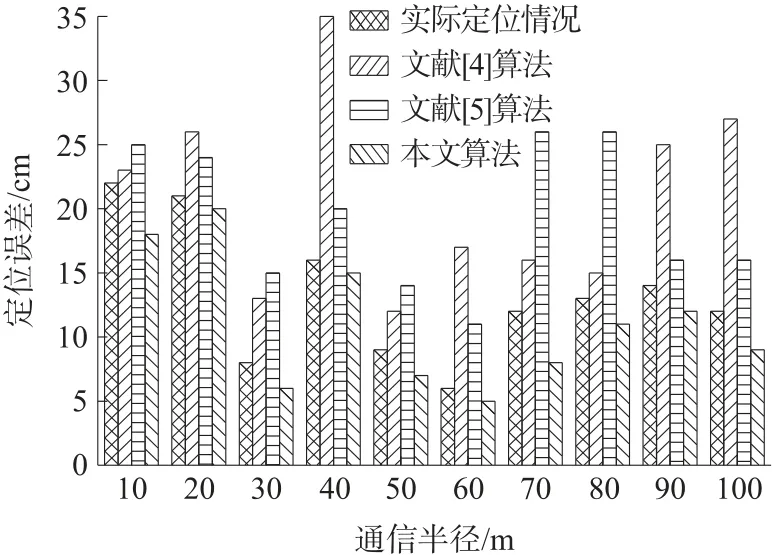
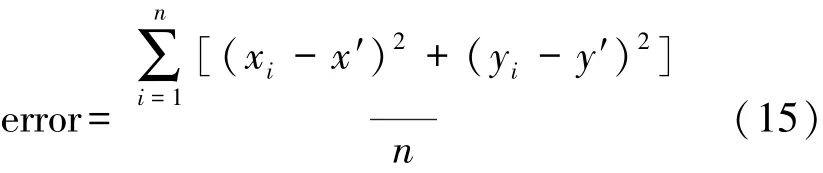
图5 未知传感节点定位误差
观察图5可以看出,本文算法、文献[4]算法和文献[5]算法的未知传感节点定位误差error分别为2.5 cm、8.3 cm、6.9 cm,由此可知,采用文献[4]算法和文献[5]算法时未知传感节点的定位时,定位误差高于本文算法。
为了进一步检验本文所提算法的优越性能,将移动无线物联网感知层锚节点密度分别设置为15%、20%。测试三种算法的未知传感节点平均定位误差,结果如图6和图7所示。
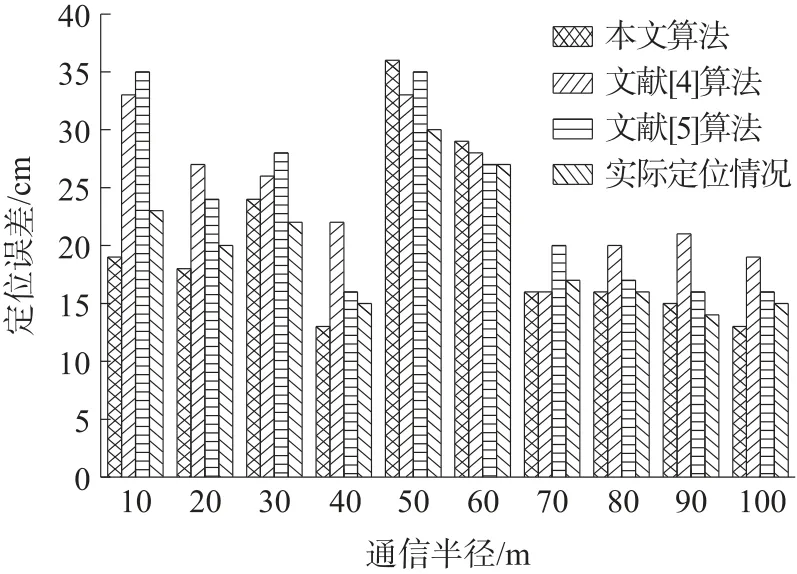
图6 锚节点密度为15%时未知传感节点平均定位误差
图7 锚节点密度为20%时未知传感节点平均定位误差
通过计算可知,当移动无线物联网中锚节点密度为15%时,三种定位算法50次试验后全部结果的平均误差分别为:文献[4]算法error=6.1 cm,文献[5]算法error=5 cm,本文算法error=2.2 cm。当移动无线物联网中锚节点密度为20%时,对三种定位算法进行50次试验,取全部结果的平均误差,文献[4]算法error=3.4 cm,文献[5]算法error=4.2 cm,本文算法error=1.2 cm。因此,当移动无线物联网中锚节点密度为15%和20%时,本文算法未知传感节点平均定位与实际定位情况基本一致,而文献[4]算法和文献[5]算法虽然定位误差也相对较小,但高于本文算法。
根据上述仿真测试结果可以看出,随着移动无线物联网中锚节点密度的升高,采用本文算法得到的各个节点的定位误差越来越小,说明未知传感节点的定位精度越来越高。而在相同锚节点密度的情况下,采用本文算法的未知传感节点的定位误差明显比文献[4]算法和文献[5]算法要小,即本文算法的定位精度得到了有效提高。
3 结论
针对传统定位算法未知传感节点定位精确度较低的问题,提出一种DV-Hop算法和位置修正方法相结合的定位算法。通过理论分析与仿真模拟可知,本文算法在原来DV-Hop算法的基础上,采用协作定位算法将归一化误差低于预设误差阈值的未知传感节点转化为锚节点,以该节点为依据定位其他未知传感节点,扩大了定位范围,并进行了未知传感节点初步定位后的位置修正,使得获得的移动无线物联网感知层传感节点定位精度更高,适用性更强。