考虑驾驶人疲劳特性的差动转向共享控制
2022-10-18方振伍林中盛王金湘殷国栋
方振伍 林中盛 王金湘 殷国栋
(东南大学机械工程学院,南京 211189)
近年来,疲劳驾驶已经成为引发交通安全事故的重要因素[1-2],据美国国家公路交通安全管理局统计,在2018年美国就有775名司机死于疲劳驾驶,而且疲劳事故的实际死亡人数将会远超统计数量[3].因此,研究疲劳驾驶行为下的先进辅助驾驶系统成为解决疲劳驾驶交通安全事故的发展需求.Wolf[4]在德国自动驾驶汽车在线调查报告中指出,当前用户主要需求是“在任何时候都能恢复对汽车的控制或终止自动驾驶程序”,即驾驶人保持方向盘控制权限的辅助驾驶.同时,根据SAE J3016标准,智能汽车仍然长期面对人机共驾的局面,先进辅助驾驶系统具有广阔的发展前景[5].目前智能汽车配备的高级驾驶辅助系统通常采用转向机构实现辅助,若可以通过直接分配驱动轮转矩来实现差动辅助转向控制,可以使得辅助机构更加紧凑,避免了额外的辅助机构[6],而且在转向机构失灵的情况下仍能够提供有效辅助从而确保行驶安全[7].四轮独立驱动电动汽车的各轮驱动力矩独立可控,因此可以通过调节车辆左右两侧驱动轮的差动扭矩直接实现转向辅助.所实现的辅助转向系统既可以提升车辆横向操纵性[8],也可作为冗余控制实现故障情况下的车辆转向能力保持[9-10],因此具有广阔的应用研究前景.
为了提升辅助转向系统的控制性能,国内外学者针对人机共享控制展开了大量研究.Guo等[11]通过模型预测控制(model predictive control, MPC)方法设计了人机共享转向控制,但缺乏对驾驶人特性的考虑.Ercan等[12]在人机交互过程中考虑了驾驶人的参数变化,结合辨识方法与MPC设计了考虑驾驶人手臂特性在线辨识的转向辅助控制系统方案.Ghasemi等[13-14]首先通过博弈论的方法实现人机共享触觉辅助控制,并基于辅助控制原理进一步推导了共享转向控制架构.
然而,多数学者缺少驾驶人与辅助系统的交互分析,也缺少对驾驶人状态的考虑.将驾驶人-车辆模型引入转向辅助系统,可以明显减少人机转向冲突[15].Nguyen等[16]引入驾驶人-车辆-道路模型设计模糊鲁棒控制器,提升驾驶舒适性.参数化的驾驶人预瞄模型[17-18]可有效地将驾驶人状态特性融合到控制器设计中.然而这些工作仅考虑了正常驾驶情况下的驾驶人特征,目前针对疲劳驾驶的研究大多集中在驾驶疲劳监测与预警技术上.如疲劳状态下,驾驶人的显著特征有脉搏波形变动[19]、反应时间增长以及心率降低[20]等,而在驾驶行为中表现出明显的方向盘滞后和偏差[21].但是,由于驾驶人已经处于疲劳状态下,疲劳预警可能无法唤醒驾驶人,从而不足以保证车辆的行驶安全性,为此,若能在转向辅助控制器设计中考虑驾驶人的疲劳状态,便可以避免由于潜在的疲劳驾驶而可能发生的交通事故,进而提升道路安全性.
考虑到在实际车辆行驶过程中,车辆系统与驾驶人往往会存在不确定性,这会给控制器的设计带来挑战.针对车速的时变性和驾驶人转向特性的不确定性,提出一种驾驶人与差动辅助转向共享操纵的动态输出反馈鲁棒控制方法.首先,建立基于单点预瞄的驾驶人-车辆模型,在驾驶人模型中以延迟时间反映驾驶人疲劳特征,并结合手臂肌肉行为建模,来反映差动辅助系统下驾驶人的肌肉反馈;然后,基于共享控制框架设计了考虑驾驶人疲劳反应时间的动态输出反馈控制器,采用线性矩阵不等式(linear matrix inequalities,LMIs)方法来实现H∞鲁棒性能,并利用多胞体方法结合动态平行分布补偿器的形式处理车辆纵向速度、驾驶人反应时间的不确定性,通过仿射矩阵考虑手臂肌肉参数的不确定性问题,结合区域极点配置方法来提升系统的稳定性能;最后,利用PreScan/Carsim /Simulink联合仿真和驾驶人在环测试验证了所设计控制器的有效性.
1 驾驶人-车辆模型
1.1 驾驶人模型
为实现车辆控制器对驾驶人操纵行为的分析,驾驶人扭矩Td,all可以分为2部分:Td,all=Td,s+Td,c,其中Td,s为基于如图1所示的单点预瞄驾驶人模型获取的驾驶人期望转矩[22],Td,c为驾驶人因差动辅助系统工作而产生的反馈扭矩.
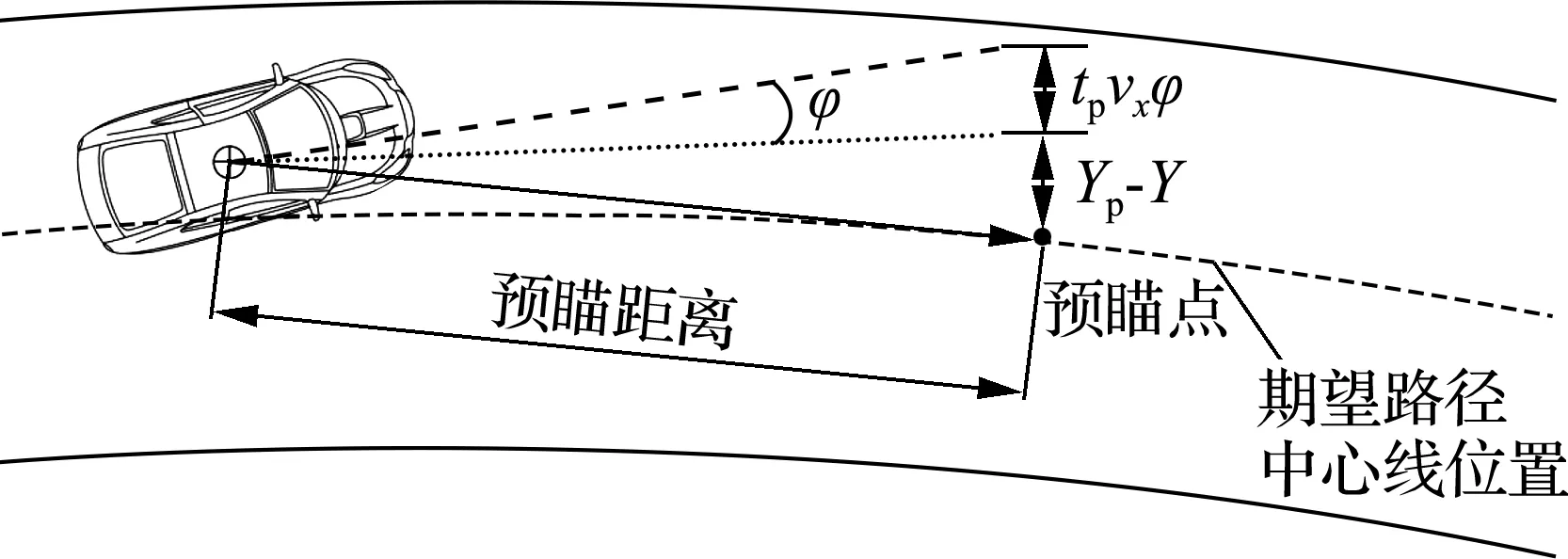
图1 单点预瞄驾驶人模型
通常,真实驾驶人通过感知预瞄点和预测位置的偏差,产生期望的方向盘转角来实现横向路径跟踪.因此,结合上述预瞄行为,期望的方向盘转角的s域表达式可以近似表示为
(1)

当获得驾驶人期望的方向盘转向角后,需要模拟驾驶人手臂将期望的转向角施加到方向盘上.本文假设驾驶人的手臂保持放松状态,所施加到方向盘上的期望转矩可表示为
(2)

当差动辅助系统工作时,辅助电机补偿的转向力矩Tc会影响方向盘转角θs,驾驶人手臂肌肉会根据方向盘的运动状态产生补偿力矩Td,c,Td,c可用如下微分方程表示[23]:
(3)
1.2 转向系统模型
本文考虑的转向系统结构如图2所示,包含了电机助力转向系统(motor driven power steering, MDPS),其中Ml和Mr分别为左、右轮的驱动力矩.本文不讨论MDPS的具体设计方法,仅针对转向结构建模进行分析.差动辅助系统中的差动辅助力矩Tc、车身左前和右前轮胎之间不同纵向轮胎力产生的直接横摆力矩Mc以及总转向力矩Td,all可以描述为[24]
(4)
因此结合式(2)~(4),考虑差动力矩辅助的转向系统动力学模型可以描述为
(5)
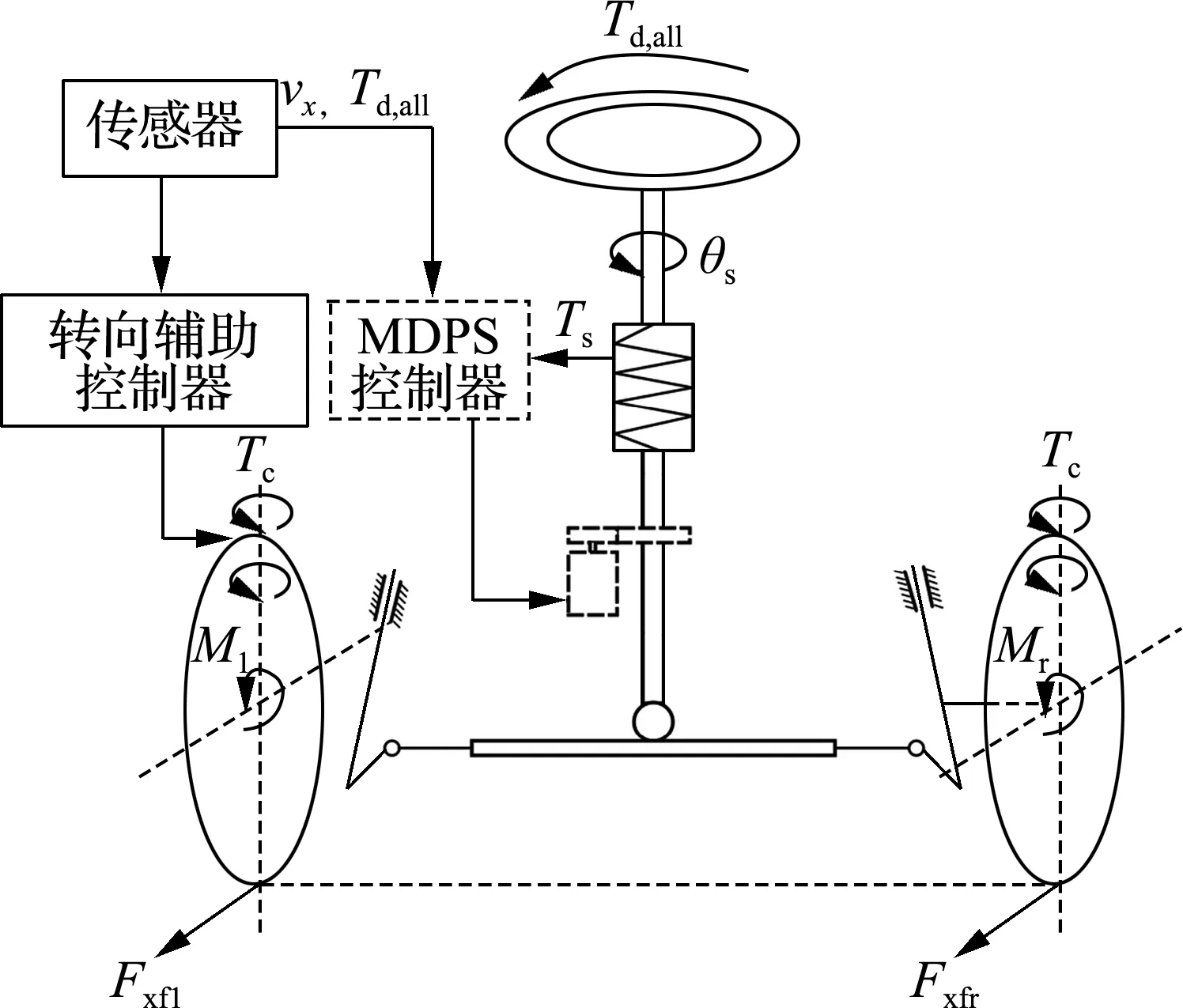
图2 具有MDPS结构与差动辅助的转向系统结构
1.3 驾驶人-车辆模型建立

(6)
式中


考虑到实际驾驶过程中车辆横向速度的测量所需传感器成本较高,侧向速度vy不作为测量输出,因此,驾驶人-车辆模型(6)的输出由车辆质心的横摆角速度、横摆角、车辆质心侧向位置、方向盘转角与角速度以及驾驶人期望的转角与角速度组成,即
(7)
式中,C2=[OI],O和I为恰当维度的零矩阵与单位矩阵.
本文设计了一个包含多目标的综合性能指标来衡量路径跟踪辅助控制的效果,性能指标包含了路径跟踪误差和驾驶人的负荷状态,分别基于驾驶人方向盘转角和角速度来表征驾驶人的生理负荷和心理负荷.另外,考虑到过大的辅助力矩会导致驾驶人过分依赖辅助系统而分心.本文提出的性能指标如下:
(8)
式中,J1表示路径跟踪误差指标;J2和J3分别表示驾驶人的生理和心理负荷的指标;J4表示控制输入相关的指标;qi(i=1,2,3)以及R表示各项性能指标的权重系数.

(9)
因此,系统的被控输出定义成如下形式:
z=C1(ρ)x+D1w+R1u
(10)

2 差动辅助转向共享鲁棒控制器设计
本文设计的共享鲁棒辅助转向控制器采用如图3所示的双层结构,其中上层人机共享控制器求
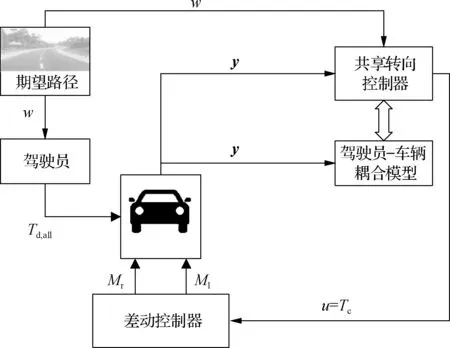
图3 差动辅助转向共享鲁棒控制器结构示意图
解差动辅助转矩,下层差动力矩分配控制器采用直接力矩分配法,将得到的差动辅助转矩转化为左、右轮的驱动力矩Ml和Mr.同时采用动态平行分布补偿器,来实现对第1节所提不确定性因素的有效控制.
根据式(6)~(10),驾驶人-车辆模型可以采用以下方程来表征:
(11)
基于以上系统,可以设计如下形式的满阶动态输出反馈控制器:
(12)

(13)

该闭环驾驶人-车辆耦合系统(13)的控制器参数矩阵满足系统渐进稳定的H∞性能指标,当且仅当对于给定的标量γ> 0和ε> 0,正定矩阵X∈R8×8、Y∈R7×8满足以下线性矩阵不等式条件:
(14)

(15)
其中,矩阵M∈R8×8、N∈R8×8为满足MNT=I-XY的非奇异矩阵,可以通过正交三角函数分解获得.
线性矩阵不等式(14)的推导采用变量代换法,通过一组新的矩阵变量对原来的矩阵进行变量代换,从而将非线性矩阵不等式问题转化为线性矩阵不等式问题,通过求解线性矩阵不等式的解,结合新旧变量的替换关系获得非线性矩阵不等式的解.首先,通过有界实引理给出非线性不等式[25]:
(16)
随后考虑到FFT≤I,因此,式(16)成立的前提是当且仅当存在标量ε>0,并且对式(16)左乘和右乘Γ=diag{I,I,I,ε-1I,I}后的矩阵不等式成立:
(17)
而式(17)是非线性矩阵不等式,无法通过线性矩阵不等式求解,因此将Xcl定义成如下形式:
和右乘diag{F1,I,I,I,I},从而得到线性矩阵不等式(14).
为了使得闭环系统具有更好的动态性能,考虑采用极点配置的方法将闭环系统极点限制在适当的区域中.由于动态输出反馈控制器采用LMI设计,因此选用极点配置法可以对LMI区域进行限制,便于在控制器求解的同时完成性能优化.本文选择圆盘区域,即所有系统极点配置在圆盘D(-q,r)内,所需满足的线性矩阵不等式如下:
(18)
下面考虑模型的可变因素.由于已经通过仿射矩阵在建模过程中考虑了手臂肌肉的不确定性因素,这里采用多胞体方法来处理车速和驾驶疲劳延迟的时变参数,考虑到这些参数都是有界的,因此可通过上下限的方式描述以上参数的范围.考虑纵向速度vx、纵向速度的倒数1/vx以及驾驶疲劳延迟的不确定性,以及1.2节中不确定参数向量ρ的定义,多胞体模型的顶点数为23=8个.显然从多胞体模型可知,所有的vx和1/vx都在由ρi(i=1, 2)最值所围成的矩形区域内.矩阵区域是保守程度最大的不确定区域描述方式,但能够简化计算过程.若使用Ω=(Acl(ρ),Bcl(ρ),Ccl(ρ),Dcl)表示闭环系统(13),根据多胞体理论,含有参数不确定性的闭环驾驶人-车辆耦合模型可写成线性参数变化的形式:
Ω=(Acl,Bcl,Ccl,Dcl)
Ωi=(Acli(ρ),Bcli(ρ),Ccli(ρ),Dcli)
i=1,2,…,8
(19)
式中,λi为增益调度的系数,不小于零且满足归一化条件,表示为
(20)
因此,总控制器增益可表示为
(21)
可以通过给定正定参数γ和ε,联立矩阵不等式(14)和(18),采用LMI工具箱中feasp求解器来求解式(21),其中驾驶人疲劳延迟时间参数的获取基于对驾驶人转向特性参数辨识的基础[26].
当获取到辅助力矩Tc后,要通过力矩分配方法来实现差动辅助,其中分配的力矩为人机共享辅助转向控制器求解得到的差动力矩Tc.为了简化力矩分配方式,本文选用直接力矩分配的算法,左轮右轮的驱动力矩可以计算为
(22)
式中,Rw为车轮有效半径.
3 试验验证
3.1 联合仿真试验验证
为了验证所设计的人机共享转向辅助鲁棒控制器的有效性,本文首先基于Matlab/Simulink- Carsim联合仿真平台,采用动态平行分布补偿器的形式将所设计控制器应用于不同疲劳程度的驾驶人上,车辆模型的主要参数如表1所示.考虑到日常驾驶行为中,换道超车是最典型的驾驶工况,为此,在仿真中跟踪双移线路径,以此来评估所提出控制器在典型驾驶工况下的有效性.
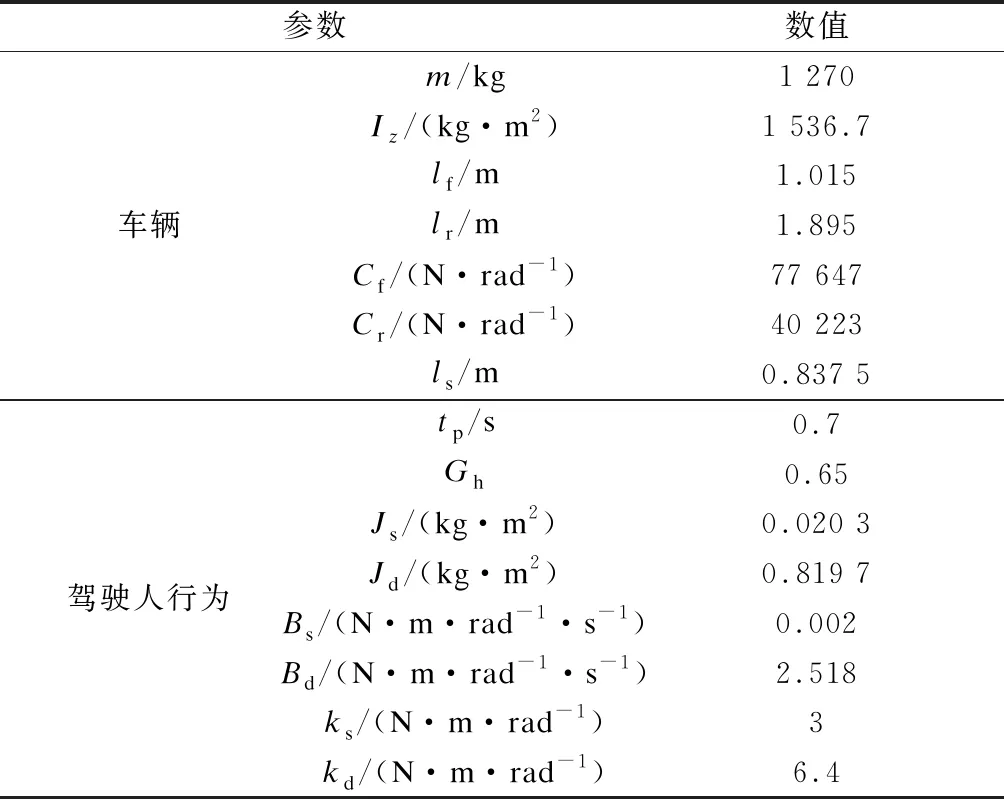
表1 仿真中的主要参数
式(8)定义的各性能指标权重系数q1、q2、q3和R是用来调整不同变量量纲的权重系数.在人机共享转向控制算法设计中,路径跟踪性能首先需要被保证,路径跟踪性能指标J1权重系数q1的设计值较大,使得辅助控制后的性能指标J1处于20~50范围内.因为在控制器设计过程中,驾驶舒适性的影响作用小于路径跟踪性能,所以驾驶人的生理负荷指标J2和心理负荷指标J3的权重系数的设计值相对较小.在疲劳驾驶下,控制器被期望给予更高的控制权限,能够较多地介入驾驶控制中,因此R的设计值使得控制作用负荷J4处于20~50范围内.故在仿真中,式(8)中具体的权重系数值设计为:q1=3,q2=1,q3=0.5,R=1/(4.5×103),选取的驾驶人单点预瞄模型根据疲劳程度不同,驾驶人反应延迟时间不同.在多胞体方法中,纵向速度的范围为[12, 17]m/s,延迟时间td的范围为[0.23, 0.6]s,驾驶人手臂肌肉参数不确定性比例σ=20%.在所选取的疲劳驾驶状态下,车辆行驶状态没有失去控制,但路径跟踪能力较差,在该行驶情况下易引发交通安全事故.仿真中的驾驶人参数见表1.
在行驶过程中,驾驶人的状态差异可以通过车辆相对参考路径的横向偏差来反映[27].因此,可以通过不同延迟时间造成横向偏差的大小来验证驾驶人疲劳程度的差异.在本文仿真试验中,选取td=0.25 s为正常驾驶人反应时间参数,td=0.45 s为轻度疲劳驾驶人反应时间参数,td=0.55 s为重度疲劳驾驶人反应时间参数,以双移线工况下车辆的横向偏差来验证驾驶人不同疲劳程度下跟踪能力的差异,如图4所示.随着反应时间td的增大,驾驶人的参考轨迹跟踪能力变差,在20~40 s和60~120 s可以明显地发现正常驾驶人转向最为灵敏,能够提前实现转向动作以及驶入直道场景时及时完成转向修正的工作.相反地,随着反应时间td的增大,驾驶人的转向呈现明显的迟钝现象,轨迹跟踪偏差大,2种疲劳程度下的驾驶人最大横向跟踪偏差超过了1.2 m,严重影响相邻车道的交通安全.
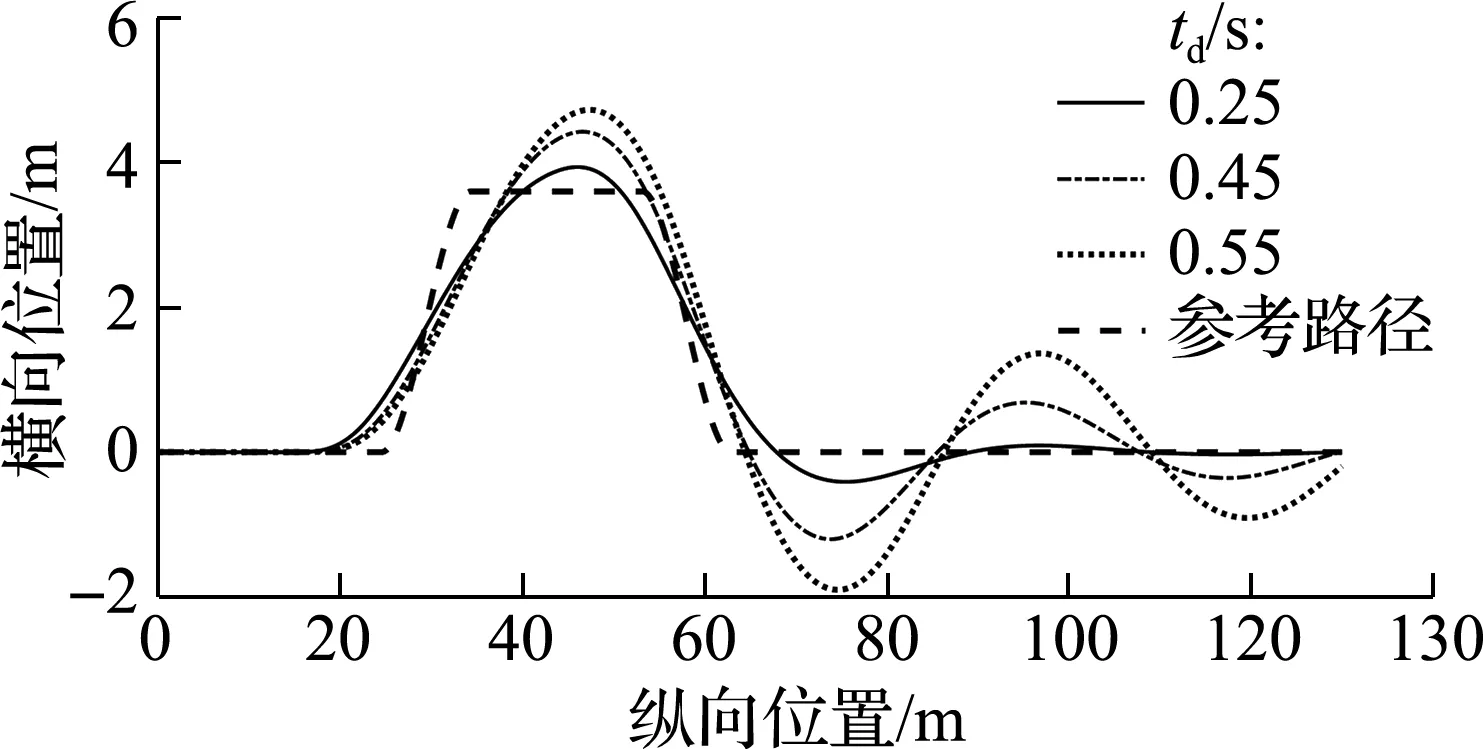
图4 不同反应延迟情况下的驾驶行为
图5显示了在不同车速和不同的驾驶人反应延时情况下系统极点配置的结果.在本文中,极点配置区域选择为圆盘D(-22, 21),因此在加入本文设计的控制器后,车辆-驾驶人耦合闭环系统的确定部分极点分布在该圆盘区域内,整个系统的动态稳定性得到改善.基于选用同一极点配置区域的原因,对于不同疲劳程度的驾驶人,确定部分的极点分布也相近.
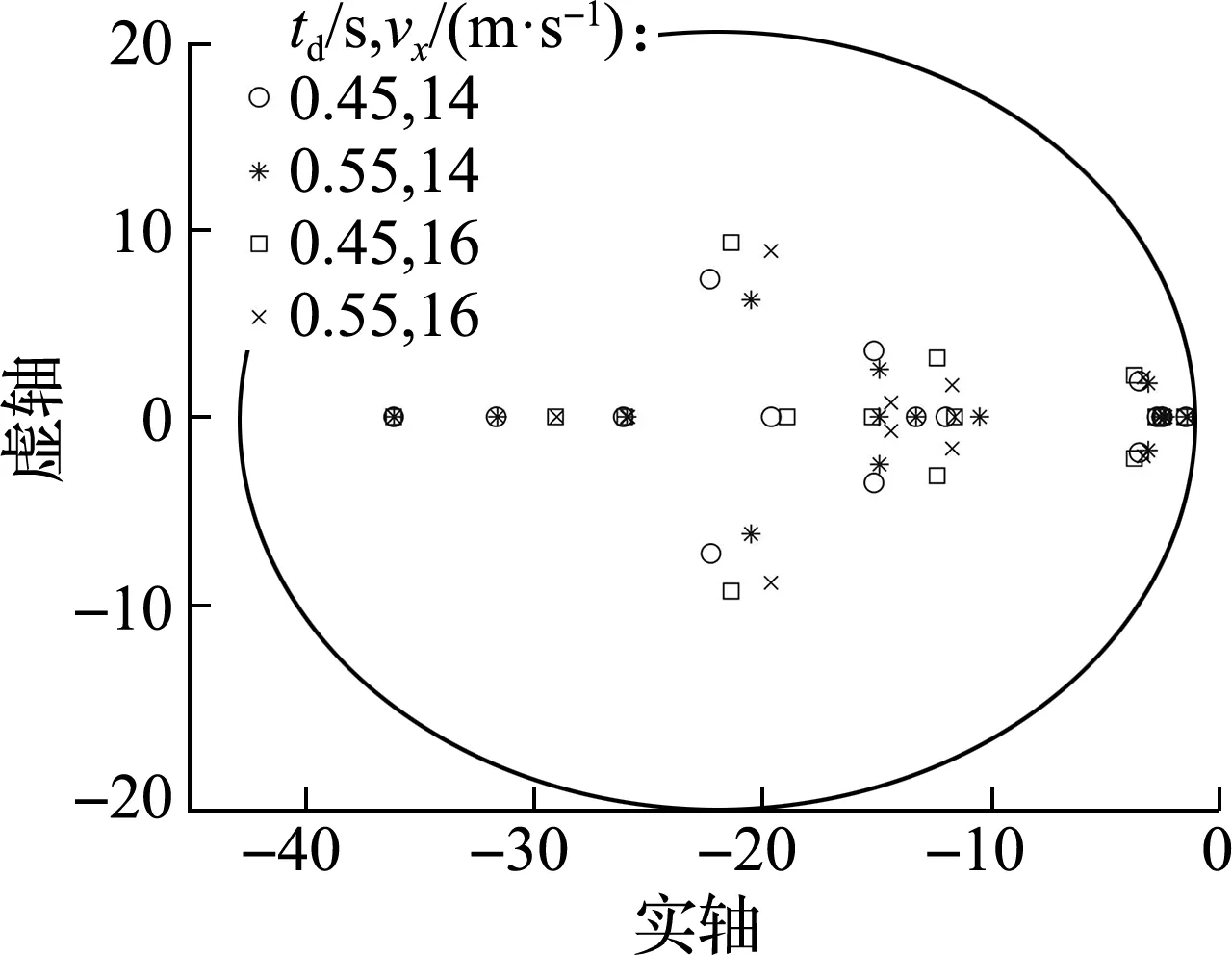
图5 闭环系统的极点分布
图6、图7分别为驾驶人处于不同疲劳程度时,在纵向车辆速度14和16 m/s情况下的车辆行驶轨迹以及与理想轨迹的偏差.由图6(a)可见,当td=0.45 s,即驾驶人处于轻度疲劳时,在跟踪双移线的过程中,路径跟踪误差最大值为1.2 m,当前车辆将影响相邻车道的交通安全.随着驾驶人疲劳程度加深,当td=0.55 s,驾驶人处于重度疲劳时,由图6(b)和图7(b)可见,路径跟踪误差最大超过了2.07 m,当前车辆将偏离车道边界,而且很容易与其他车辆发生碰撞.而在本文设计的人机共享辅助转向控制器作用下,换道过程结束后的最大路径跟踪误差减小到0.53 m,车辆路径跟踪性能得到了明显改善,车辆在换回原车道的过程中,到达稳态所需要的时间与轨迹震荡幅度明显减小,同时也避免了车辆在双移线换道过程中与相邻车道车辆发生碰撞的危险.
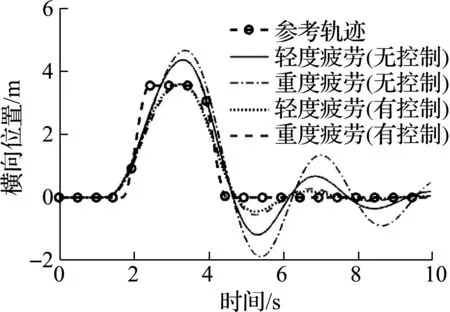
(a) vx=14 m/s

(b) vx=16 m/s
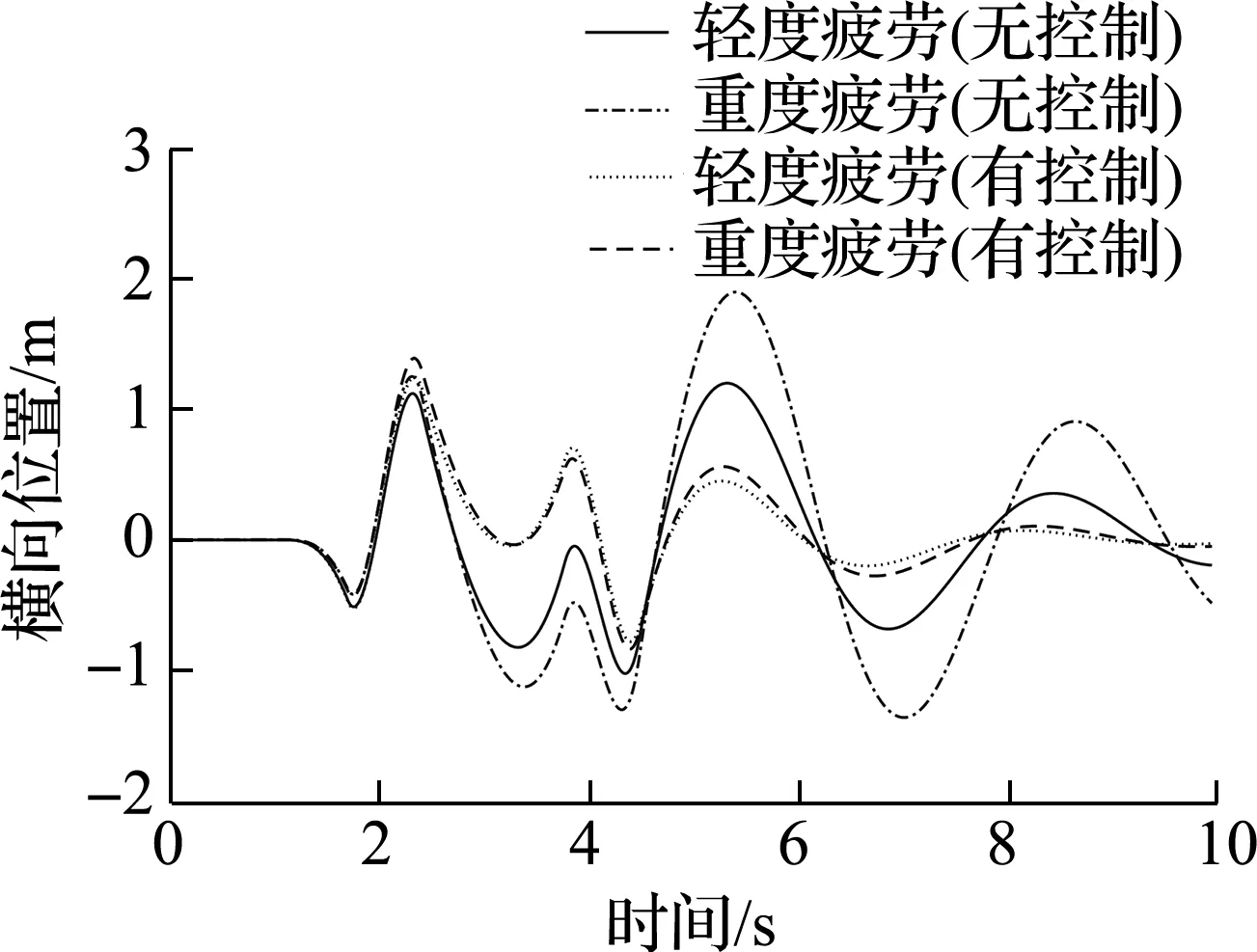
(a) vx=14 m/s
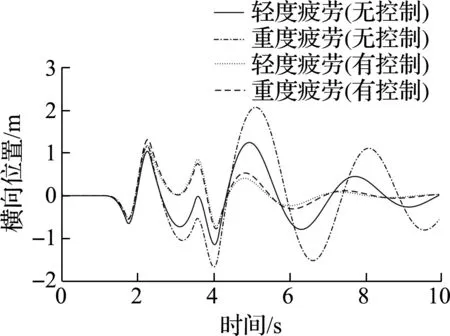
(b) vx=16 m/s
以车速14 m/s的工况为例进行分析,图8(a)显示了该车速下方向盘转向角的变化过程,在本文提出的控制器辅助作用下,方向盘转角幅值明显减小.尤其在5 s后车辆换回原来车道的过程中,施加转向辅助控制之后,方向盘转角的波动趋于平稳.由图8(b)可见,在车速为14 m/s的情况下施加转向辅助控制后,车身的横摆角速度换回原来车道后收敛到稳态值的响应更快,说明整个驾驶人-车辆闭环系统的操纵灵活性得到了显著改善[28].另一方面,由图9可以看出,在不同车速和不同的驾驶人疲劳程度下,转向辅助控制都能够提供恰当的辅助力矩以改善驾驶性能,其中对于重度疲劳的驾驶人提供的转向辅助力矩比对于轻度疲劳的驾驶人更大.

(a) 方向盘转角
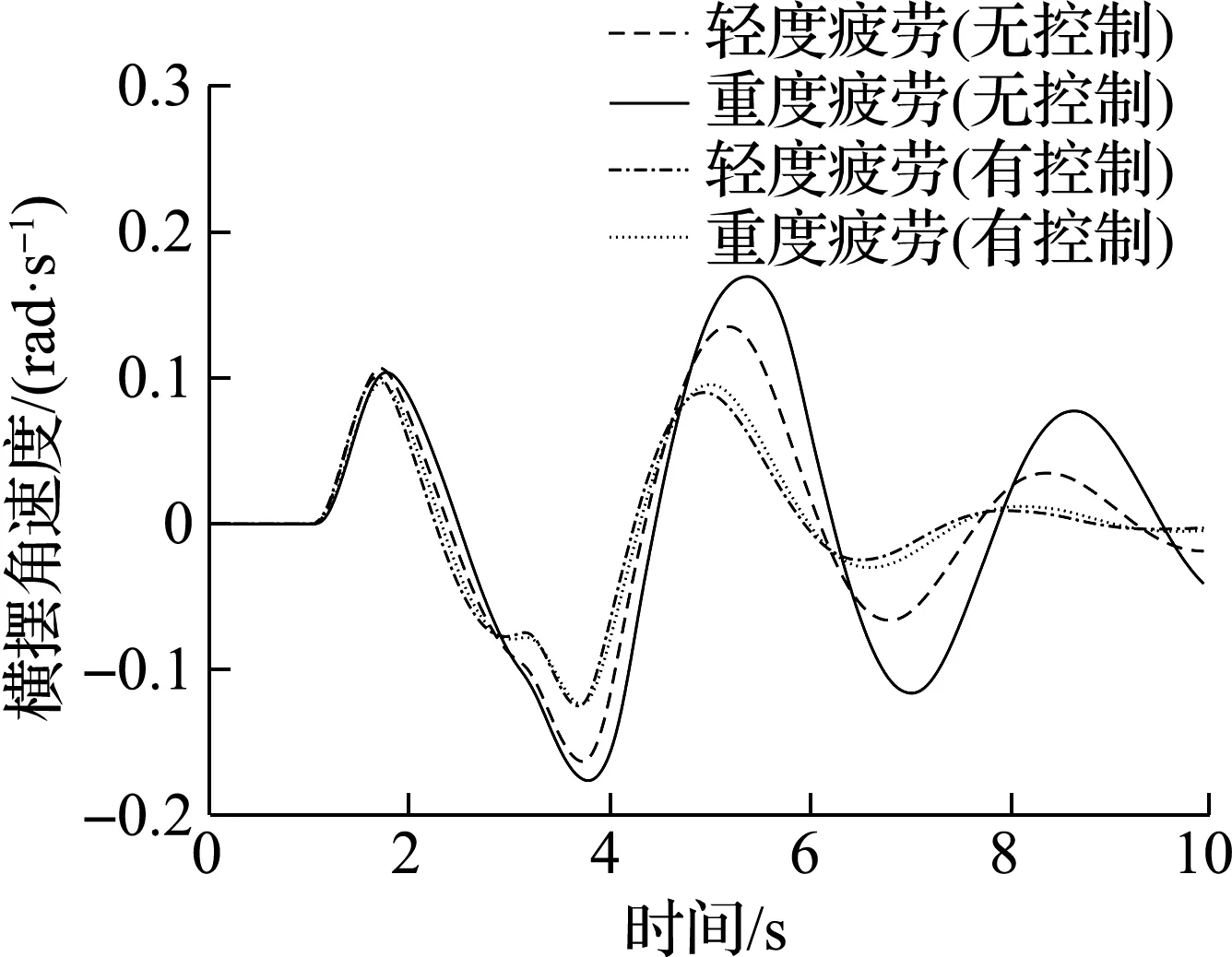
(b) 车辆横摆角速度
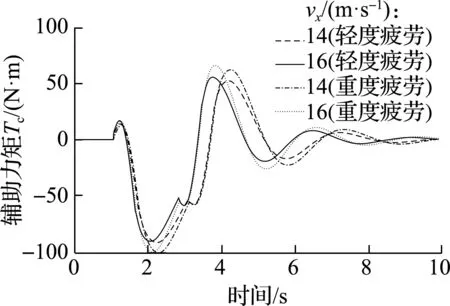
图9 不同状态下的差动辅助力矩
表2和表3给出了式(8)中各性能指标的结果.根据分量评估指标结果的观察可知,在无控制的情况下随着疲劳程度的增加,驾驶行为的危险性显著提升.假定已经得到驾驶疲劳特征的辨识结果,本文提出的控制器可以针对不同的驾驶人疲劳状态提供差异化的驾驶辅助,从而改善路径跟踪性能.由表2和表3的结果可见:在驾驶人轻度疲劳程度下路径跟踪误差性能指标减小了59.53%以上,而在驾驶人重度疲劳程度下路径跟踪误差性能指标减小了74.2%以上,确保了驾驶安全性.在改善路径跟踪能力的同时,驾驶人的驾驶负荷得到了很大的缓解,生理负荷指标J2与心理负荷指标J3在控制器辅助下均减小48.92%以上,兼顾了驾驶的稳定性和舒适度.另外,从表2和表3可以看出,采用了本文设计的辅助转向控制后,随着驾驶人疲劳程度的加深,性能指标J3却明显减小,可以认为疲劳程度加深后,驾驶人的反应速度以及转向速度也会减缓.而本文设计的控制器能够针对驾驶人反应迟缓的特征给出个性化的辅助,在降低驾驶人心理负荷的同时也可以实现较好的路径跟踪效果.
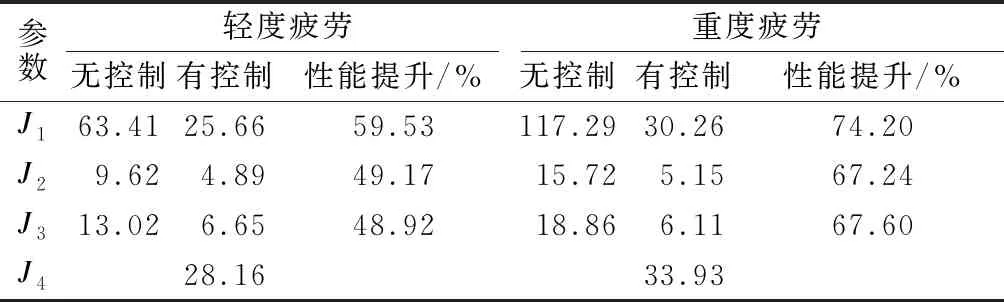
表2 vx=14 m/s时性能指标结果

表3 vx=16 m/s时性能指标结果
3.2 驾驶人在环试验验证
为验证所提出控制器的实际应用效果,搭建该驾驶模拟器平台如图10所示,进行驾驶人在环的驾驶模拟器验证.该平台由计算机、罗技G29方向盘、三联屏显示器组成.在PreScan中建立试验道路交通场景,高保真CarSim车辆动力学模型被用来作为虚拟车辆试验对象,PreScan场景和CarSim车辆动力学模型被嵌入到PC端的Simulink软件环境中,从而实现软件之间的数据交互通信,此外本文共享控制算法在Simulink软件环境中设计并进行数据采集.试验测试时,驾驶人通过罗技G29方向盘输入转向信号至车辆动力学模型,Simulink中的控制器实时获取所需状态量并输出差动辅助力矩辅助转向过程,在试验过程中,路感反馈通过方向盘中线性力矩反馈中心位置的变化来模拟,驾驶人在转向过程中始终保持顺从驾驶状态.

图10 驾驶人在环验证
在驾驶人在环试验中,驾驶人控制车速至14~15 m/s进行试验验证.为了确保驾驶人跟踪期望的路径,以车道中心线为期望路径设置换道场景,由单一驾驶人重复驾驶获取数据.试验驾驶人在经过连续12 h工作后参加试验,反应速度测试平均值为463 ms,高于12~60岁人类平均反应时间(250 ms),此状态下的驾驶人可以视为疲劳驾驶状态,结合前文认为驾驶人处于轻度疲劳状态,控制器中的各项参数采用仿真的参数,预瞄距离选择5 m.为了便于数据的对比,采用纵向位置作为驾驶人在环试验的横坐标,测试结果如图11所示.
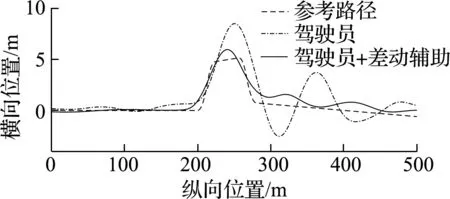
(a) 车辆轨迹

(b) 方向盘转角
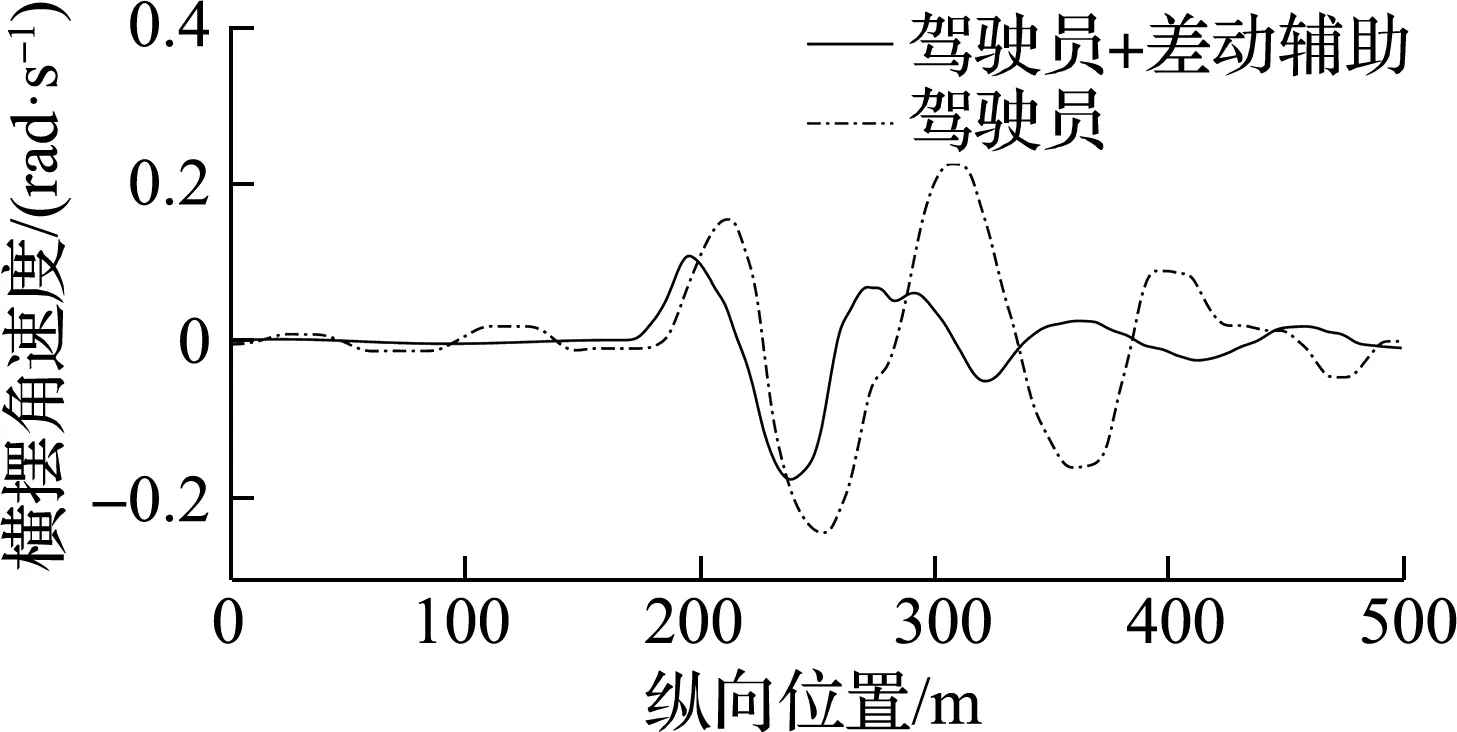
(c) 横摆角速度

(d) 差动辅助力矩
根据图11(a)的结果可以看到,当辅助控制器未添加时,预瞄最大偏差为3.98 m,驾驶人会影响相邻车道车辆的正常行驶.而当辅助控制器添加后,预瞄最大偏差降低至1.24 m,车辆跟踪的震荡幅度减小,说明车辆路径跟踪性能得到了明显改善.同时结合图11(b)和(c),在施加控制后,方向盘转角的波动更加平稳,车身的横摆角速度在回道后也更快收敛,改善了车辆操纵灵活性.从图11(d)可以发现,在200~300 m处,驾驶人的跟踪误差较大,差动共享控制器提供更多的力矩补偿来修正车辆的横向误差.这表明提出的差动共享转向控制器可以很好地提升车辆路径跟踪性能.
4 结论
1) 改进了传统的单点预瞄驾驶人模型,在模型中增加了驾驶人手臂肌肉系统,并在模型中定义了反映驾驶疲劳程度的驾驶特性参数,增强了驾驶模型的通用性和可解释性.在此基础上,建立了驾驶人-车辆耦合模型.
2) 基于建立的驾驶人-车辆耦合模型,针对具有差动辅助转向功能的独立轮驱动电动汽车,设计了考虑疲劳行为的人机共享转向输出反馈鲁棒控制器,对闭环系统的极点进行配置,同时考虑时变参数与不确定因素进而提升所设计控制器的辅助性能.
3) 试验验证表明,采用本文提出的差动辅助转向控制后,车辆路径跟踪性能提升59.53%以上,驾驶人的生理和心理负荷均降低48.92%以上.该控制器对于不同疲劳状态的驾驶人,能够提供差异化的辅助力矩,从而确保安全驾驶.
