机载激光雷达在大型水利工程渣场平整中的应用
2022-10-17王连超,桑颍葛,郭建中
王 连 超, 桑 颍 葛, 郭 建 中
(中国水利水电第七工程局有限公司,四川 成都 610213)
1 概 述
通常,水利工程建设的土石方量和弃渣量非常巨大,其弃渣场的面积和等级均较大。渣场场地平整前,需要依据地形数据计算出平整高程及挖填平衡方量。而传统的地形测量多以RTK和全站仪相结合的方式进行数据采集[1],作业过程中,测量人员必须徒步采集地形特征点,但因测区地形复杂、植被茂密,人工测量不仅存在作业困难、人员安全问题,而且所采集的数据精度低、密度小,不能全面反映出测区的实际地形。低空摄影测量的方法虽然能快速获得测区的三维数据[2],但受地表植物影响,亦不能获得准确的地面高程数据,从而影响到后期计算的精度。而无人机机载激光雷达技术能够应对上述测量环境中的不利条件,其具有一定的穿透性,能透过植被干扰得到地面高程信息、快速灵活地获取精度较高的地形数据,从而为后期的计算工作提供保障。
引江济淮工程(安徽段)引江济巢段菜巢线C003-1(河渠)标位于引江济淮工程菜子湖线路,区间总长度为16 km。工程主要施工内容包括两岸堤防填筑施工、渠道土方开挖施工、沿线渠系建筑物施工以及渣场水土保持施工等。其中5号渣场位于左岸,占地总面积近191万m2,其为平铺型渣场,现状地面高程为13~21 m,堆渣分布不均,整体呈现为“北高南低、东高西低”的态势。根据工程规划要求,渣场主要用于弃渣堆放以及土方填筑施工的取土,在堆渣过程中,对其实施相关的水土保持工作。渣场的水土保持工作主要包括:表土剥离与回覆、临时截排水、挡渣土堤、渣场平整、绿化种植等。阐述了如何结合机载激光雷达技术在5号渣场后期平整环节提出的一种快捷高效技术,并经过实际应用验证了其可行性。
2 无人机机载激光雷达测量技术
机载激光雷达属于一种主动式直接测量系统,其将全球卫星导航定位系统(GNSS)、惯性导航系统(IMU)、激光测距技术、雷达技术相结合,利用发出和回收的激光脉冲信号,经过数据软件处理,能够快速获取地面采样点的三维坐标[3,4]。机载激光雷达属于一种激光扫描仪,在其飞行过程中连接到飞机上,创建出一个3D点云地形模型。这是目前替代数字摄影测量法最详细、准确的创建数字高程模型的方法。与摄影测量法相比,机载激光雷达的一个主要优势是能够从点云模型中滤除植被反射,从而创建一个数字地形模型。与传统测量方式相比,其优点更突出。机载激光雷达的运用对我国工程测量行业具有重要的意义,能够进一步促进该行业的快速发展[5]。
随着无人机设计制造技术的进步,无人机的性能和稳定性不断提高;与此同时,激光雷达设备也逐渐向轻小化发展,两者的结合使激光点云数据获取的途径更加快捷灵活,成本亦更低。阐述了借助无人机机载激光雷达测量技术提出的新的渣场平整测量计算方案,其具体的技术路线见图1。

图1 技术路线图
3 渣场场地平整土石方量测量的计算流程
3.1 数据采集
在设计外业航测飞行路线时,遵循安全、经济、高效的原则,以项目成果数据精度要求为目标,充分分析了测区的实际情况,包括测区的地形、地貌、机场位置、已有控制网情况、气象条件等影响因素,结合LiDAR测量设备自身特点,如航高、航速、相机镜头焦距及曝光速度、激光扫描仪扫描角、扫描频率及功率等,同时考虑航带重叠度、激光点距、影像分辨率等,选择最为合适的航摄参数,为获取高质量的数据提供基础技术保障。通过踏勘了解到5号渣场的地形和空域情况:渣土堆放不均匀且灌木杂草丛生。根据实际精度要求及硬件设备参数,在保证安全的前提下,制定出合理的飞行方案。本次航测航高为120 m,航速为8 m/s,点云重叠率为60% 。测区局部三维地形见图2。
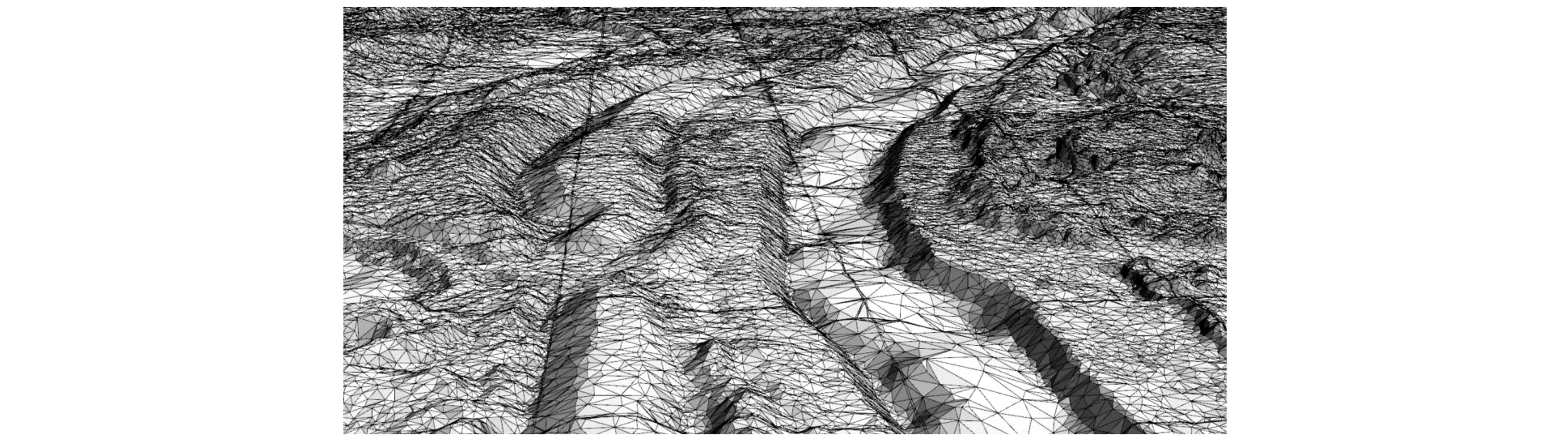
图2 测区局部三维地形图
鉴于渣场周边已有西安80坐标系控制点成果,故采用GPS-RTK 对控制点进行了复核并求解出测区转换参数,将转换残差控制在 3 cm 以内,为后期点云数据转换做准备。在测区内均匀选取平坦地面,采集检核点用于后期点云数据处理后检核点云精度以确保点云数据成果的质量及精度。
在测区已知控制点上架设基站,GNSS基站的开机时间一定要早于无人机启动时间;采用静态观测模式设置,将航飞参数输入无人机飞行控制系统,通过低空激光扫描获取点云数据。数据采集结束后,对航飞数据进行质量检查,确保航飞数据及点云数据的有效性及完整性。
3.2 数据处理
将GNSS基站、GNSS流动站、IMU 数据进行组合导航解算,得到高精度的航迹文件。将航迹文件与激光原始文件相结合,解算出点云数据并对点云数据进行坐标转换、转换到目标坐标系。
利用Terrasolid对点云数据进行批处理、粗分类,初步将地面点与非地面点分离。粗分类实现的是将地面与非地面大概的分离(对于复杂地形不可能实现准确无误),需要对粗分类的结果进行人工检查和修改,这一步称为细分类。检查修改的内容主要为两类:(1)应该保留在地面层中的点被粗分类到非地面层,对此,需要手动返回到地面层中;(2)需要分类掉的点(植被、建筑物、交通设施、桥、小物体等)未粗分类干净、彻底,需要手动分类干净。
为了对点云有更直观的判别及分类,将采集到的航测照片结合通过轨迹解算后获取的高精度影像 pos,采用航测软件Pix4D 免像控工艺生产正射影像。参照正射影像,经过细分类后导出LAS格式的可视化的地面点云数据,点云数据见图3。将采集到的检核点作为真值与地面点云数据进行对比,总检核点数为58个,误差绝对值的最大值为3.5 cm,误差绝对值的最小值为0 cm,计算出中误差为±1.9 cm,地面点云数据符合相关应用精度要求。
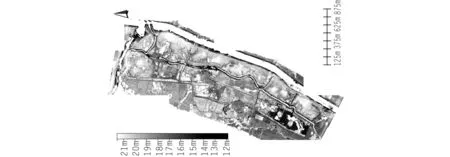
图3 点云数据示意图
3.3 数据应用
基于点云数据求出渣场平整高程及平衡挖填方量。机载激光雷达产生的点云是以离散、不规则方式分布在三维空间中的点的集合。由于点云密度大,数据量亦非常大,采用传统的工程测绘软件处理速度非常缓慢甚至无法运行;而栅格数据具有数据结构简单,便于空间分析和地表模拟,操作运算速度快的优点,因此,可以将点云数据转换为栅格数据,然后进行运算。
ARCGIS是一款处理地理信息数据的软件,由于其具有强大及全面的地理数据处理功能而在许多行业中被应用,作为地理相关的测绘行业尤其如此。该方案利用ARCGIS,将LAS格式的地面点云数据转换为栅格数据,然后使用表面体积工具,设置高程为0的参考平面,求出参考面与地面之间的体积V,查询渣场区域在参考平面上的投影面积S,可以求出平整高程h=V/S,然后将高程h作为参考面,计算出参考面以上与地面之间的体积即为挖方量,而参考面以下与地面之间的体积则为填方量。在编制施工计划及方案时,还可以将渣场划分为若干块,采用相同的方法分别计算挖填方量,结合整体得出最优土石方调配方案,从而能够更为合理地编制出机械设备资源配置计划。
4 结 语
详细介绍了大型渣场场地平整前快速获取地形数据的方法以及计算平整高程和挖填方量的解决方案。该方案应用无人机机载激光雷达技术获取地面点云数据,然后将点云数据转换为栅格数据用于计算平整高程及挖填方量,相较于传统方法,该方案具有作业速度快、劳动强度低、获取结果精度高等优点。
在项目实际应用过程中可以看出:机载激光雷达技术改变了传统单点测量方法为点阵测量方法,使数据采集过程具有高效、高精度的特点。能够提供扫描测区表面的海量三维点云数据,可用于获取高精度、高分辨率的数字地形模型,由此可以看出:无人机机载雷达技术在水利工程测绘领域中具有广阔的应用前景。