智能无人系统探测方法研究及应用*
2022-10-16刘琦罗宁朱健东郭晨煜
刘琦 罗宁 朱健东 郭晨煜
1. 河南警察学院 2. 郑州信大先进技术研究院 3. 郑州铁路职业技术学院
引言
随着互联网、无线通信、人工智能等信息技术的不断发展与进步,智能无人系统(无人机[1,2]、无人车、无人船等,如图1所示)的应用呈井喷式增长势头。如,露天大型活动现场不时看到无人机、服务机器车(人);海面上多有出现运输、巡逻、环境保护等的各类无人船。虽然它们给人们的生活、工作带来极大便利,但由于无人系统具有极易DIY改装、操作步骤简单易行等特点,从而衍生出系列问题[3]。如,航拍他人隐私的安全问题、操作不当导致无人机从高空掉落威胁到他人人身安全问题、无标识(黑飞)无人系统携带、运输特殊物品[4]的问题等等。

图1 智能无人系统
以典型的无人机黑飞现象为例,解决该问题的关键环节是黑飞无人机的感知与发现。及时感知、发现黑飞无人机,才能为后续定位、干扰、阻断、降级打击、诱导、定点迫降等工作的展开奠定基础。黑飞无人机的感知与发现技术主要有从网络层及数据链路层等的探测。针对黑飞无人机感知与发现的关键瓶颈问题,本文从智能无人系统探测技术的发展开始阐述,研究了网络层解除认证帧洪水攻击技术,并应用于智能无人系统的探测及通信阻断;研究了数据链路层基于无线电侦测技术的目标探测与识别,文中提出一种通用探测流程,并成功探测到某品牌无人机跳频信号,实现了无人机的感知与发现。
一、智能无人系统探测技术发展及应用
(一)智能无人系统探测技术的发展
如前述,智能无人系统主要涉及智能无人船、智能无人车及智能无人机。智能无人船多用于航道数据测量、海事巡航及搜救、港口监控、水文勘测、水质采样、水面清洁等场景,智能无人船的探测技术暂无需求。智能无人车的使用越来越广泛,较为成熟的品牌有百度apollo、小马智行Pony、华为HUAWEI、AUTOX等等,特别是无人物流车等比较具有代表性。但由于其技术仍需改进,其探测技术的需求不大。智能无人系统中探测方法技术应用最具代表性的是智能无人机。民用无人机通信频段为:840.5~845MHZ(上行遥控链路),1430~1444MHZ(下行遥测链路),以及2400~2476MHz、5725~5829MHz。市场上较为成熟的品牌有大疆(DJI)、派诺特(PARRORT)、小米FIMI系列、JJRC、Air Hogs等等;前期研究发现,智能无人机在正常通信过程中,若受到干扰则多使用跳频方式进行通信,通过跳频通信系统控制发射信号载波频率,依据既定参数及规律持续跳变,以保障通信质量,增加抗干扰能力,提高信号传输安全性。其中的技术难点为实现未知信号的盲检测、破坏无人机正常通信、对无人机进行降级干扰、诱导甚至定点迫降等等。
(二)智能无人系统探测方法典型应用
以数据链路相关技术为例,智能无人系统探测技术的典型应用是通过无人机侦测设备对无线电频率扫描,获取信号频点、识别特征、解码探测定位非法入侵无人机,截获无人机与遥控器之间的控制信号、图传信息等实现的。无人机侦测设备是无人机防御体系(以下简称“防御体系”)的核心部分。防御体系的建立是为了更好地管控各类无人系统,服务于军用、民用、铁路、电力、智慧城市等多个应用场景,如图2所示。

图2 智能无人防御系统
该体系典型应用方案涉及目标探测、信号识别、干扰处置、飞手定位等。
第一,目标探测。现代智能无人防御系统通常使用雷达、光电、无线电多源感知探测设备,融合雷达杂波抑制性能好;光电在楼宇、丛林密集背景下可以自动跟踪、不宜失锁;无线电分类识别率高、可以探测非标准无人机、可以自动学习特征库外的信号特征等优秀性能;在特定领域内探测是否有智能无人系统。
第二,信号识别。成功探测智能无人系统目标后,要识别无人机频点、序列号、图传协议等信息;识别目标是否在库,从而区分敌友。
第三,干扰处置。开启干扰打击,发送小功率灵巧式电磁干扰,阻断目标图传信号和导航信号。同时,向无人机发出导航欺骗信号,对失去控制的无人机持续进行导航系统诱骗,使得无人机偏离预设飞行路线,避开防护区域,成功迫降至处置区域。
第四,飞手定位。飞手定位是实现手持遥控器的飞手定位。利用无线电测向设备,多点交叉,实现飞手定位。
通过典型应用方案可知,“目标探测”是其关键步骤,“目标探测”也是解决黑飞无人机感知的关键技术。下面本文分别对网络层、数据链路层智能无人系统的探测进行阐述。
二、网络层智能无人系统探测、阻断方法及实践
在实验室环境下,本文利用解除认证帧洪水攻击技术原理,实现了网络层对靶机无人系统的目标探测及通信阻断。
(一)靶机无人系统的选择与验证
本文选择Arduino平台的由Wi-Fi控制通信的四轮驱动遥控车作为靶机。在PC端下载Arduino的IDE编写环境,并在PC端完成代码编写工作,经调试、验证后,通过数据线烧录至Arduino电路开发板,手机控制端安装控制软件APP,触发开关后顺序执行预设指令。
(二)基于开源工具Aircrack的智能无人系统信号探测及阻断
本文在树莓派平台上搭载Kali Linux系统,将带有监听功能的无线网卡(本文购买型号为:BD-WUSB150N)接入树莓派平台,进行信号探测及阻断,步骤如下:
第一,键入命令iwconfig查看无线网卡状态。
第二,键入命令airmon-ng start wlan0,打开无线网卡的“监听模式”。
第三,键入命令airodump-ng wlan0mon进行Wi-Fi通信信号的扫描工作,获取AP及客户端BSSID等信息。
第四,键入命令iw wlan0 set channel 1对指定频道进行监听。
第五,键入命令 airodump-ng -i wlan0 --bssid XX:XX:XX:XX:XX:XX,获取靶机及其控制终端的相关通信信息数据。
第六,发出解除认证攻击指令aireplay-ng -0 1 -a网关mac地址 -c 目标主机mac地址 wlan0。Aircrack向指定BSSID信号发出解除认证数据包。
AP及靶机机器人接收到解除认证数据包后,前两者失去连接,导致靶机机器人无法与目标AP取得通信,失去目标AP对其远程控制。成功阻断靶机与控制手机的正常通信。
虽然上述实验实现了网络层上靶机无人机的探测及信号阻断,但上述实验方案需要手工操作,且压制信号也需要有反应时间,若应用于真实环境中具有较大局限性。下面本文将介绍文中提出的一类数据链路层智能无人系统频点通用检测流程方法,文中将该方法应用于某品牌消费级智能无人机的目标探测工作。
三、数据链路层智能无人系统探测方法及实践——以某品牌为例
本文提出一类数据链路层智能无人系统的探测(即频点检测或跳频检测)流程方法,并根据该方法实现了某品牌跳频检测。具体如下:
(一)跳频信号探测通用流程
第一,获取宽带采样数据的(STFT)时频谱图。将采集预处理后的非平稳信号x(t)实施(STFT)短时傅里叶变换,得到信号STFT时频谱图。如公式(1)、(2)所示。
短时傅里叶变换为:

其中,w(t)为窗函数。
功率谱为:

第二,检测是否有跳频信号。对时频谱图进行空域滤波、图像分割,模板匹配等步骤,检测是否存在跳频信号。如公式(3)~(6)所示。
步骤1:空域滤波
将变换后的时频谱图视为输入图像,对其进行空域滤波。

其中,w(s,t)表示模板,f(x,y)表示图像,g(x,y)表示空域滤波后图像。
步骤2:图像分割
选择合适阈值T,生成二值图像g(x,y),进行图像分割。

步骤3:模板匹配
使用相关法进行模板匹配。T(x,y)为模板,在二值图像g(x,y)上平移,得到二值图像g(x,y)和T(x,y)模板的相似性d(i,j)。

归一化后可得模板匹配相关系数。

遍历图像g(x,y)后,最终匹配目标为最大值Rmax(im,jm)对应子图g im jm(x,y)。
若存在跳频信号(时频谱图中的亮点),则退出检测流程。若没有找到,转向第三步。
第三,改变检测带宽及步进,精细检测是否存在跳频信号。检查是否遍历无人机信号频带。若已遍历,则转向第四步;若未遍历,则降低检测带宽,提高信噪比,精细检测,以便发现跳频点。
第四,根据跳速修改STFT参数。在不同跳速下对STFT选用不同参数的窗函数,以获取更高分辨率的时频谱图。循环进行第四步,直到搜索遍历整个跳速范围。
第五,获取跳频检测序列。
本文提出的通用检测跳频信号的流程及方法如图3所示。
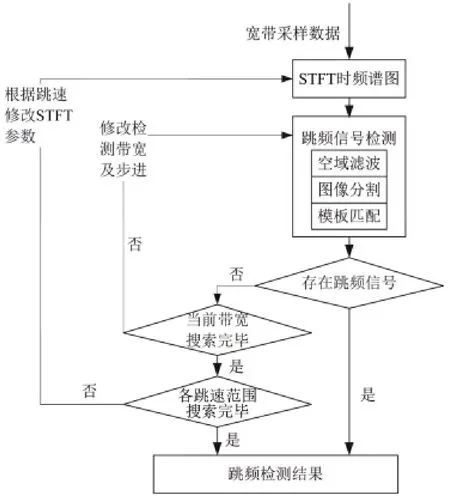
图3 通用检测跳频信号流程
(二)某品牌消费级智能无人机频点信号检测
1. 信号采集
此次实验按照采样率200MHz采集信号。
第一,打开探测设备,开启信号采集开关。
第二,打开遥控器开关,在智能无人机未开机条件下,采集遥控信号。
第三,无人机开机,无人机系统建链,采集上行遥控及下行信号。
第四,启动无人机遥控操作,在无人机遥控状态下采集遥控命令与智能无人机状态信息信号。
第五,无人机、遥控关机,并且关闭探测设备,停止采集。
2. 生成STFT时频谱图
对接收信号经过预处理后进行STFT变换,生成STFT时频谱。
3. 检测跳频信号
通过空域滤波、图像分割、模板匹配等步骤实现对跳频信号的获取与检测。
4. 修改检测带宽及步进
根据跳速修改STFT参数,循环处理目标频段,进行2~3步骤,直至各跳速范围搜索完毕。
此例中获取某品牌遥控器STFT时频谱如图4所示。
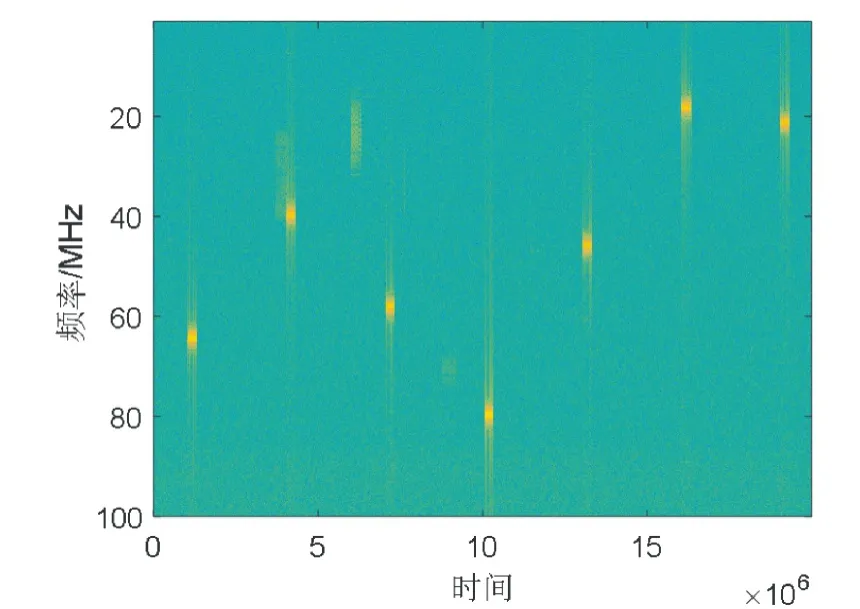
图4 某品牌遥控器跳频信号时频谱
从实测信号的局部时频图中,得到跳频信号的频率估计(频率/MHZ)和各跳信号到达时间(TOA/s),详见表1。

表1 STFT对实测信号的检测结果
实验发现,某品牌跳频频率范围为2.4GHZ~2.48GHZ,外层调制方式为OFDM,内层调制方式为BPSK,信号带宽约是80MHZ,属于低速跳频范畴。

立足工作需要,该实验在无人机跳频通信频率等信号未知的前提下,对获取信号进行盲检测,提取跳频周期、信号到达时间等特征参数,为进一步获取目标对象通信数据、建立完善易用的智能无人防御系统奠定基础。
四、结语
本文主要讨论了智能无人系统的探测技术。文中分别探讨了网络层、数据链路层智能无人系统探测方法。提出一种无人机跳频信号通用探测流程,基于该流程实现了某品牌的信号探测。下一步的工作将围绕测控链路信号调制识别与解调译码技术、遥控指令编码分析技术、测控链路信号自动侦察识别技术等展开,以便构建更加完善的无人防御系统。