基于责任激励约束下的智慧产业项目中社会资本参与合作的演化博弈
2022-10-16田昌民乔丽丽李佳昕
陈 群, 田昌民, 陈 哲, 乔丽丽, 李佳昕
(1. 福建工程学院 管理学院, 福建 福州 350118; 2. 宁德职业技术学院 经济管理学院, 福建 宁德 355099)
智慧城市是物联网、云计算等新兴信息技术与城市化高度融合的产物[1],其建设过程主要依托于智慧产业项目输送血液。智慧产业项目是指为了完成智慧产业目标,在以知识、数据、创意等为核心资源的约束下,依托大数据、物联网、云计算、区块链等新兴信息技术为依托开展一系列非重复性的活动。它与传统项目内涵不同的是,智慧产业项目主要体现了较高程度的数字化、网络化、信息化和自动化等特征,是依托于云计算、大数据等新兴信息技术的智慧型行业项目集合,其具有极强的技术性要求和自主性要求[2],其中技术性要求主要是为了迎合智慧城市建设的市场需求,体现在实现智慧新产品、新服务等智慧技术研发方面[3]。自主性要求主要是为了迎合传统产业升级改造的市场需求,体现在实现产业内能够推行或扩散一些新型智慧技术或智慧解决方案等方面[4]。但是,这两项要求都需要政府的宏观决策和把控,即通过对智慧产业项目进行科学规划、政策指导,以实现智慧产业布局与当地政府智慧城市建设发展目标相契合。所以智慧产业项目的完成需要政府推动和企业参与,共同促进智慧产业的可持续性发展。
因此,政府为了大力推动智慧城市建设,给企业起到良好引领作用,开创了许多智慧产业项目需要完成,旨在为城市实现智慧化发展提供动力。但目前智慧产业项目资金投入问题始终制约着智慧产业的发展规模,同时也是智慧城市建设过程中亟需解决的一大问题[5]。对此,如何激励更多社会资本积极参与到智慧产业项目中助力智慧城市建设是值得关注的问题。
在相关研究中,侯羽[6]认为利用政府科技资金在城市智慧产业发展中的先导作用和杠杆效应,在一定程度上可以撬动多倍社会资本投入到智慧产业项目中来。钱斌华[7]认为加大企业税收优惠,可提升社会资本对智慧产业项目的风险投资动力。杨俊杰[8]认为通过特许经营、委托经营等方式可以吸引社会资本投资建设智慧产业项目。满青珊和孙亭[9]认为通过PPP模式可为智慧城市建设提供充足的资金支持。张静[10]认为利用完善基础环境,拉动重点应用以及政策指导等不同方式,可引导社会资本流向智慧产业。
基于以上文献梳理发现,吸引社会资本参与来解决智慧产业建设主要依靠政府管理或税收政策等方式。这些方式虽能缓解智慧产业项目的资金短缺问题,但是为了吸引社会资本参与其中,依靠政府的财政优惠等倾斜政策还会在后期合作中出现一些问题,尤其是智慧产业项目属于一种由技术和知识组成的双核心创新驱动性项目[11],其具有高投入、高风险、高收益特性,容易受社会资本的盈利天性以及技术、知识创新驱动信息不对称性问题的影响,使社会资本在智慧产业项目参与合作中易出现道德风险和机会主义行为,进而容易将社会资本所承担风险责任转化为政府责任,形成政府隐性或财政风险问题。因此,需要政府分析和设置合理约束机制来规范社会资本的合作行为。
在相关研究中,高华等[12]基于风险偏好和公平偏好分析,认为政府部门的激励水平与社会资本的公平偏好系数呈反向关系,与其风险规避度呈正向关系。黄思韵[13]认为政府激励对社会资本在提高技术创新和减少机会主义行为方面具有促进作用。Li和Cai[14]认为在需求不确定的情况下政府激励可以促使社会资本以高能力和低价格方式参与项目。Shi[15]认为政府制定优惠投资的激励政策,可以解决资金风险问题。
基于以上文献梳理发现,在关于社会资本易出现道德风险和机会主义行为问题研究中,大部分都是在考虑政府如何设置风险分担与风险补偿激励制度来更好地应对社会资本的风险偏好和公平偏好,提高社会资本参与的积极性。但很少有文献对社会资本责任意识激励约束的考虑,而社会资本参与智慧产业项目的努力程度受到政府激励措施外在影响的同时,还受到自身责任意识的内在激励约束影响[16]。因此,本文针对社会资本在参与政府规划的产业项目中易出现道德风险和机会主义行为问题,构建了考虑政府责任激励约束的“政府 - 社会资本”智慧产业项目参与的演化博弈模型,来提高社会资本在智慧产业项目上的合作动力,避免社会资本出现道德风险的机会主义行为。
1 模型构建与求解
1.1 问题描述
智慧产业项目合作主要是依据合同或合作协议来完成项目目标任务,这在完成智慧产业项目的实际过程中极有可能会受合同约束以外的不确定性因素影响。一方面是双方信息不对称,由于社会资本存在自身的盈利天性,易将社会资本承担的风险责任在一定条件下转化为政府需要承担的责任,形成政府隐性或财政风险,如合同再谈判支出、项目接管(正常和非正常)后的支出、技术研发和升级改造项目失败的救助支出等[17]。另一方面是智慧产业项目非传统项目,它是以云计算、大数据等新兴信息技术为依托,体现出较高程度的数字化、网络化、信息化和自动化等特征的智慧型行业项目集合,具有极强的技术性要求,而技术性要求中的技术研发和升级改造都具有很强的不确定性风险[18],同时智慧产业项目本身也具有投入高、风险高、收益周期长等特点[19]。因此,相对这一类企业来说,政府在智慧产业项目上没有相对占优势的专业知识,也没有途径掌握了解他们的决策和行动[20],所以社会资本企业掌握着政府无法获知的信息,他们比政府更有信息优势,可以躲避来自政府的监督。
1.2 模型假设
为了保证智慧产业项目的顺利进行,有必要从政府角度对社会资本的责任风险进行激励约束的讨论,分析如何提高社会资本履行责任合作的内在实施动力,以提高社会资本在参与智慧产业项目上能够进行责任合作,故将模型假设如下。
假设1:政府部门和社会资本为博弈主体,且均为有限理性人[21]。假定政府在参与智慧产业项目合作中有两种选择:实施责任激励约束和不实施责任激励约束。同理,对于社会资本来说也存在两种选择:履行责任合作行为和出现道德风险的机会主义合作行为。
假设2:在有限理性情况下,政府选择不实施责任激励约束概率为x,实施责任激励约束概率为1-x,其中x∈[0,1],社会资本选择履行责任合作概率为y,选择机会主义行为合作概率为1-y,其中y∈[0,1]。
假设3:政府在智慧产业项目合作中基本收入为S1,基本支出为B1,社会资本基本收入为S2,基本支出为B2。当社会资本履行责任合作时,其履行责任的收益为D2,履行责任成本为E,给政府带来的智慧产业项目收益为D1。此时,政府对社会资本实施责任激励为F。当社会资本采取机会主义行为时,对政府造成损失为W,社会资本增加机会主义成本为K,政府对社会资本的责任惩罚力度为T,政府的责任监督成本为C。
基于以上假设,构建博弈收益矩阵见表1。
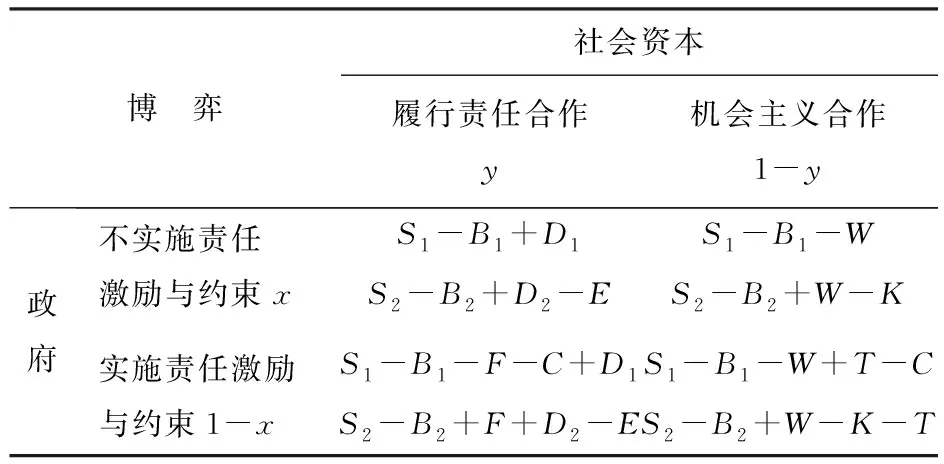
表1 演化博弈模型的支付矩阵
1.3 演化模型构建
1.3.1 政府收益及复制动态方程
政府在智慧产业项目中采取“不实施责任激励约束”的期望效益为:
UG1=y(S1-B1+D1)+(1-y)·
(S1-B1-W)
(1)
政府采取“实施责任激励约束”的期望效益为:
UG2=y(S1-B1-F-C+D1)+(1-y)·
(S1-B1-W+T-C)
(2)
政府平均期望效益为:
UG=xUG1+(1-x)UG2
(3)
政府选择“实施责任激励约束”策略的复制动态程为:
(4)
政府策略的复制动态方程表现了实施责任激励约束策略和不实施责任激励约束策略的群体演化过程,反映出复制动态方程的意义:假设政府在智慧产业项目中实施责任激励约束策略的效益比平均效益高,那么群体中选择策略将随着博弈开展,其比例上升。
将式(1),(3)代入政府选择“实施责任激励约束”策略的复制动态方程(4),可以得到:
=x(1-x)[y(F+C)+(1-y)(C-T)]
(5)
1.3.2 社会资本收益及复制动态方程
社会资本在参与智慧产业项目合作中采取“履行责任合作”的期望效益为:
UH1=x(S2-B2+D2-E)+
(1-x)(S2-B2+F+D2-E)
(6)
社会资本采取“机会主义合作”的期望效益为:
UH2=x(S2-B2+W-K)+
(1-x)(S2-B2+W-K-T)
(7)
社会资本平均期望效益为:
UH=yUH1+(1-y)UH2
(8)
社会资本选择“履行责任合作”策略的复制动态方程为:
=y(1-y)[-x(F+T)+
(F+D2-E-(W-K-T))]
(9)
1.4 演化模型求解
将式(5)与式(9)联合起来,并令其为0,即
(10)
得到两组稳定状态的解为:
x1=0,x2=1,
2 模型的均衡策略分析
2.1 复制动态方程分析
2.1.1 政府复制动态方程分析
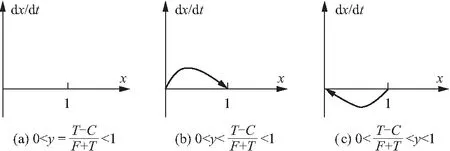
图1 政府的相位图
2.1.2 社会资本复制动态方程分析



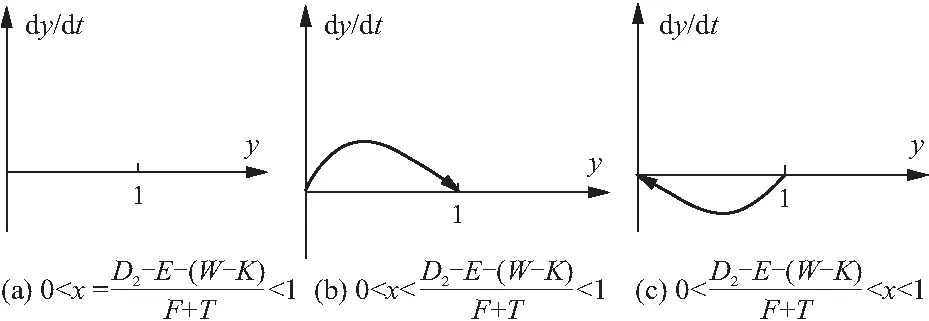
图2 社会资本相位图
2.2 稳定性策略分析

依据以上分析,计算雅克比矩阵如下:
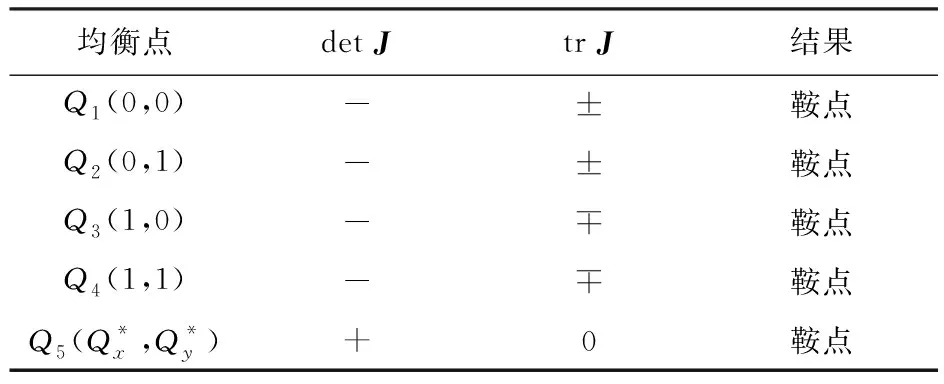
根据不同均衡点对detJ和trJ进行计算,计算结果如表2所示。
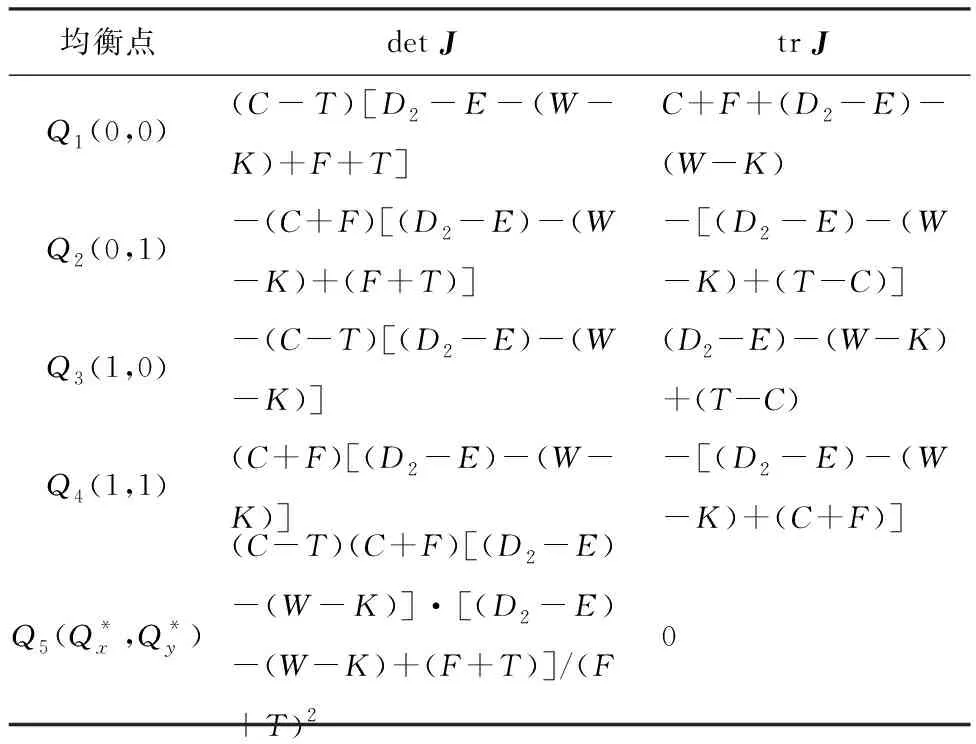
表2 演化博弈模型均衡点的det J和tr J
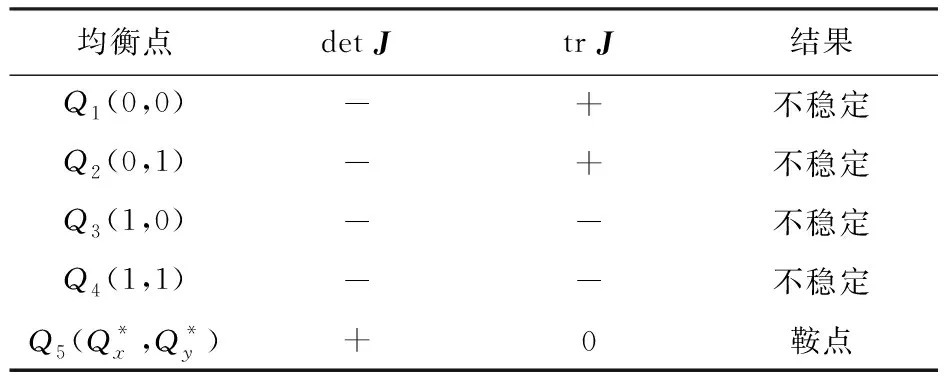
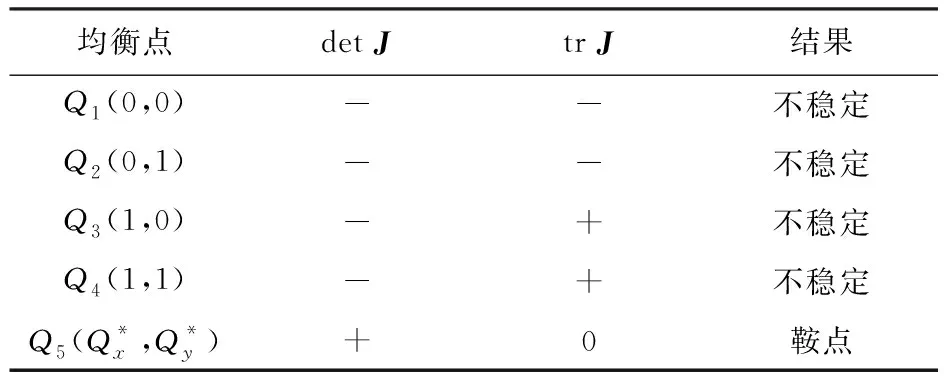
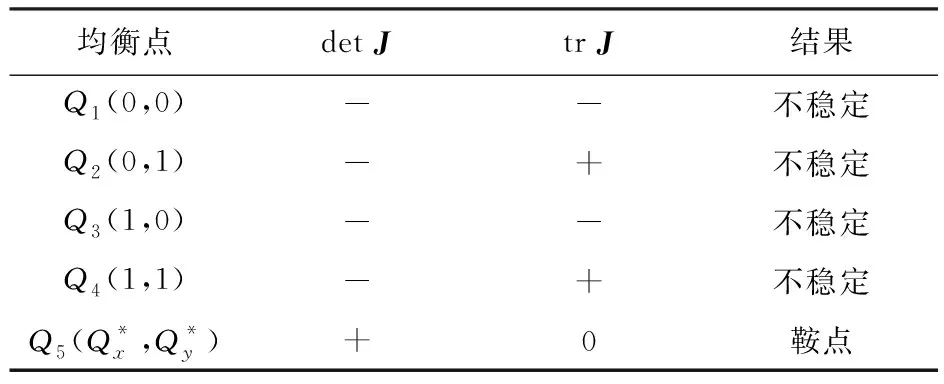
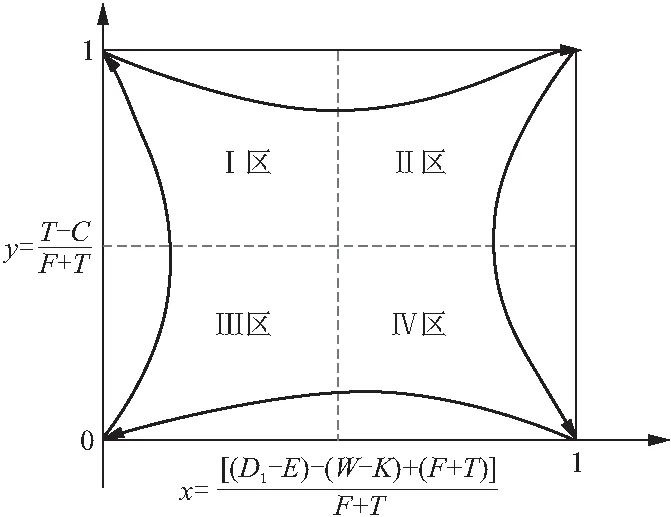
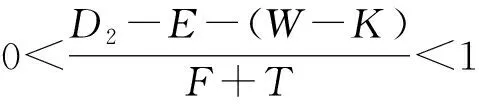
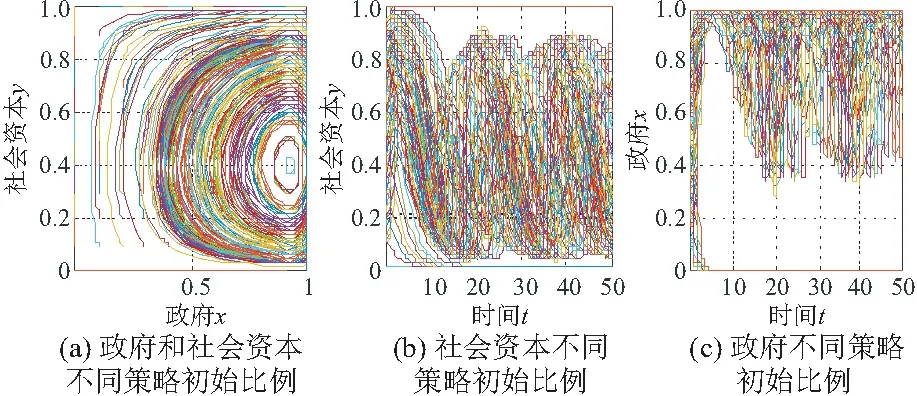
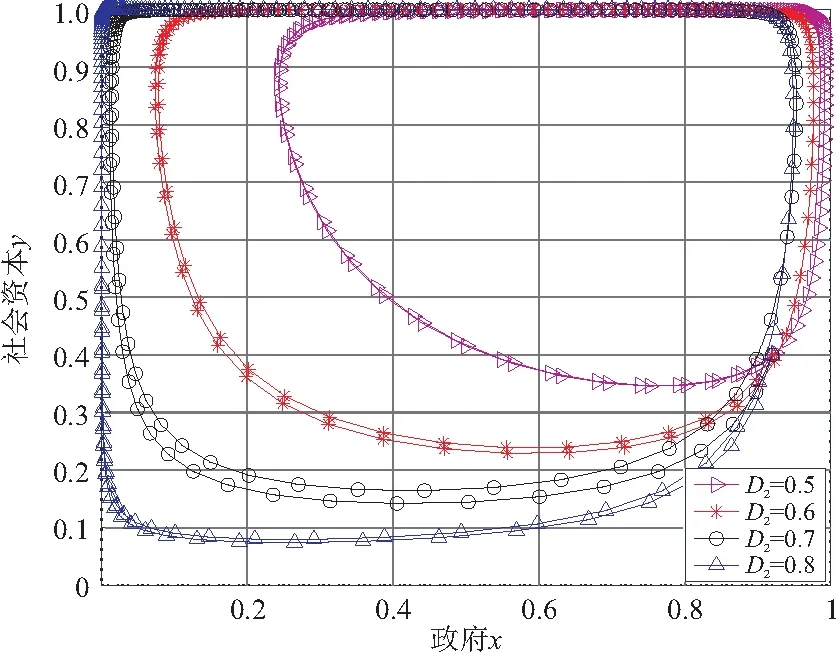
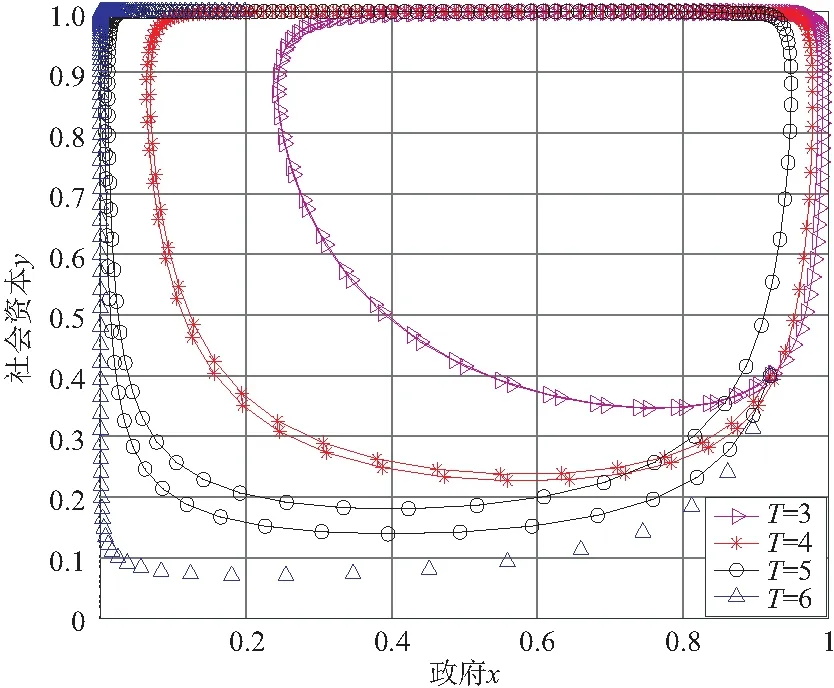
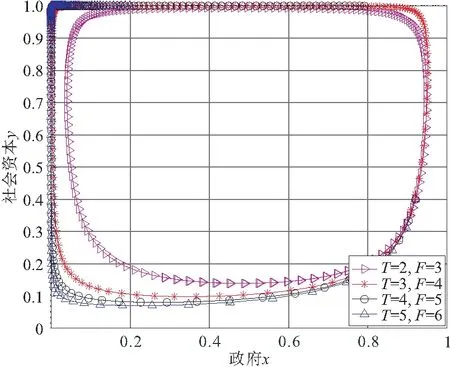
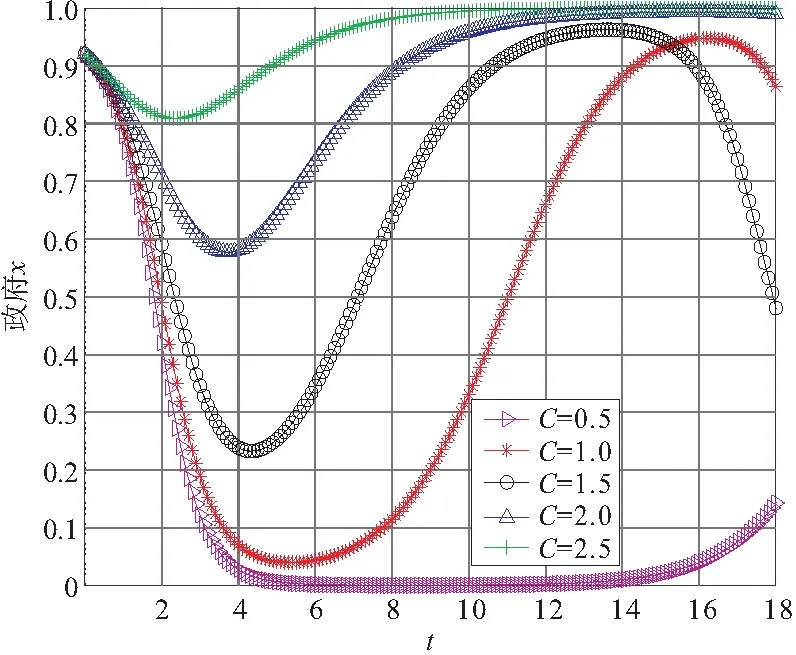
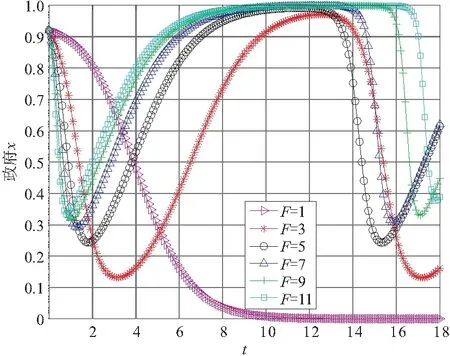
由假设可知,(D2-E)<(W-K),(W-K)-(D2-E)<(F+T),F+C>0,C (1)当(C+F)>(W-K)-(D2-E),T-C>(W-K)-(D2-E)时,根据detJ>0,trJ<0判断条件对均衡点进行判别,结果如表3所示。 表3 演化博弈的均衡点及稳定性 (2)当(C+F)>(W-K)-(D2-E),T-C<(W-K)-(D2-E)时,根据detJ>0,trJ<0判断条件对均衡点进行判别,结果如表4所示。 表4 演化博弈的均衡点及稳定性 (3)当(C+F)<(W-K)-(D2-E),T-C>(W-K)-(D2-E)时,根据detJ>0,trJ<0判断条件对均衡点进行判别,结果如表5所示。 表5 演化博弈的均衡点及稳定性 (4)当(C+F)<(W-K)-(D2-E),T-C<(W-K)-(D2-E)时,根据detJ>0,trJ<0判断条件对均衡点进行判别,结果如表6所示。 表6 演化博弈的均衡点及稳定性 表7 演化博弈的均衡点及稳定性 图3 演化博弈相位图 根据相位图和均衡稳定性分析可以看到该博弈根据初始状态存在不同的均衡情况,但不存在演化稳定策略: (1)当政府和社会资本的最初选择情况落在Ⅰ区域时,博弈结果将向(1,1)演化。即政府采取不实施责任激励约束,社会资本采取履行责任合作,合作机制(不实施责任激励约束,履行责任合作)将成为群体所有参与者的最终决策。(2)当政府和社会资本的最初选择情况落在Ⅱ区域时,博弈结果将向(1,0)演化。即政府采取不实施责任激励约束,社会资本采取机会主义合作,合作机制(不实施责任激励约束,机会主义合作)将成为群体所有参与者的最终决策。(3)当政府和社会资本的最初选择情况落在Ⅲ区域时,博弈结果将向(0,1)演化。即政府采取实施责任激励约束,社会资本采取履行责任合作,合作机制(实施责任激励约束,履行责任合作)将成为群体所有参与者的最终决策。(4)当政府和社会资本的最初选择情况落在Ⅳ区域时,博弈结果将向(0,0)演化。即政府采取实施责任激励约束,社会资本采取机会主义合作,合作机制(实施责任激励约束,机会主义合作)将成为群体所有参与者的最终决策。也就是说如果政府用于责任监督成本和责任激励成本过高,对实施责任激励约束的动力不足,会使得双方的博弈不存在恒定的演化稳定策略,从而落入了一个循环。这也是在智慧产业项目合作过程中最容易出现的问题,即政府责任激励约束力度不够—社会资本产生机会主义合作—政府加大责任激励约束力度—社会资本履行责任合作—政府责任激励约束减弱—社会资本增加机会主义。 所以政府在实行责任激励约束的过程中,减少责任激励约束成本C和F是确保政府做好责任激励约束的前提条件。只有通过将责任激励约束所产生的成本转化成为社会资本履行责任合作创造的额外收益,加大机会主义惩罚力度才能推动智慧产业项目合作的高效运转,创造社会效应,才能走出循环怪圈,发挥社会资本的最大效用。 前文针对政府与社会资本在参与智慧产业项目合作中的决策过程和影响机理进行了分析,为政府和社会资本达成良好均衡合作策略提供了思路。下面通过数值模拟和仿真分析对上述理论结果进行验证。 表8 模型参数初始设定 仿真结果如图4所示。从图4a可以看出政府和社会资本的策略选择呈现出一个循环趋势。从图4b,4c可知,当社会资本在参与智慧产业项目合作中的初始策略选择履行责任合作,主要朝1方向演化,但随着时间的推进,社会资本的策略选择又朝机会主义合作策略方向演化。随后,随着政府在不实施责任激励约束策略和实施责任激励约束策略之间不断反复演化,致使社会资本的策略选择在履行责任合作和机会主义合作之间循环往复。验证了政府责任激励约束力度不够—社会资本产生机会主义合作—政府加大责任激励约束力度—社会资本履行责任合作—政府责任激励约束减弱—社会资本增加机会主义的这种循环现象。 图4 政府、社会资本不同策略初始比例的演化 x=[(0.5-0.2)-(1-0.3)+(2+3)]/(2+3) =0.92, y=(T-C)/(F+T)=(3-1)/(3+2)=0.4 故将数值0.92,0.4分别作为政府和社会资本的策略选择的初始比例,在保证其他初始参数不变条件下,改变社会资本履行责任合作的收益值,即D2取0.5,0.6,0.7,0.8。由图5可以看出,随着社会资本履行责任合作的收益不断增加,不断扩大了Ⅰ的范围,且社会资本的策略选择显著向1(履行责任合作)方向演化,同时政府的策略选择显著向0(实施责任激励约束)方向演化,说明社会资本履行责任合作收益增加,社会资本履行责任合作的意愿增强,博弈演化系统向(1,0)方向演化趋势显著。 图5 责任合作的收益对策略演化的影响 在保证其他初始参数不变条件下,仅改变政府对社会资本采取机会主义合作的处罚力度,即T取3,4,5,6。由图6可以看出,随着社会资本投机行为的打击力度不断提高,不断扩大了I的范围,且博弈系统向(1,0)方向演化趋势显著。当政府处罚力度T=6时,打破了政府与社会资本在策略选择博弈上的循环怪圈,社会资本选择履行责任合作的策略演化趋于稳定。 图6 责任处罚对策略演化的影响 3.3 责任奖惩激励约束对策略演化的影响 在保证其他初始参数不变条件下,改变政府对社会资本履行合作的责任激励以及采取机会主义的处罚力度,即T取2,3,4,5,F对应取3,4,5,6,由图7可以看出,随着政府对社会资本的责任奖惩激励约束力度不断提高,扩大了I的范围,使博弈系统向(1,0)方向演化趋势更为显著。当T≥4时,政府与社会资本在策略选择博弈上呈现良好的稳定策略,政府的策略行为向实施责任激励约束方向演化,社会资本也自觉选择履行责任合作策略。可见,实施责任激励约束对社会资本避免出现机会主义行为具有显著积极作用。 图7 责任奖惩激励约束对策略演化的影响 在保证其他初始参数不变的条件下,仅改变政府的责任监督成本,即C取0.5,1,1.5,2,2.5。由图8可以看出,当C=0.5时,政府选择实施责任激励约束策略演化趋势显著,但随着时间的推移,还会出现向不实施责任激励约束策略演化。当C=1,1.5时,政府的策略选择开始出现波动,当C=2,2.5时,随着监督成本增加,政府的选择越向1(即不实施责任激励约束策略)方向演化。说明政府的责任监督成本越高,政府采取实施责任激励约束的动力越弱。 图8 责任监督成本对政府策略行为演化的影响 在保证其他初始参数不变条件下,仅改变政府的责任监督成本,即F取1,3,5,7,9,11,由图9可以看出,当F=1时,政府策略选择向实施责任激励约束策略方向演化趋势显著,但是随着责任激励成本不断增加,政府的策略选择出现波动,策略选择逐步向不实施责任激励约束策略方向演化。 图9 责任激励成本对政府策略演化的影响 本文从社会资本在参与智慧产业项目合作中履行责任角度,构建了政府对社会资本采取责任激励约束的演化博弈模型,并根据演化博弈模型的数值模拟仿真进行分析,结果表明:要想使得政府和社会资本在智慧产业项目合作中达成最优演化稳定策略,即“实施责任激励约束、履责合作”。一方面首先要确保政府监督成本和责任激励成本不能太高,以保证政府对责任激励约束的实施动力,其次要利用责任奖惩的激励约束手段,加大对社会资本投机行为的打击力度,并适当给予履行责任合作的奖励,比如通过给予技术创新上的绩效奖励等,来引导社会资本的积极合作,可避免机会主义行为的出现。另一方面,社会资本要增强自身责任意识,将政府责任激励约束所产生的成本转化成为社会资本履行责任合作的收益,以不断刺激政府的责任激励约束行为,使双方策略选择达到最优,实现智慧产业项目整体收益的最大化。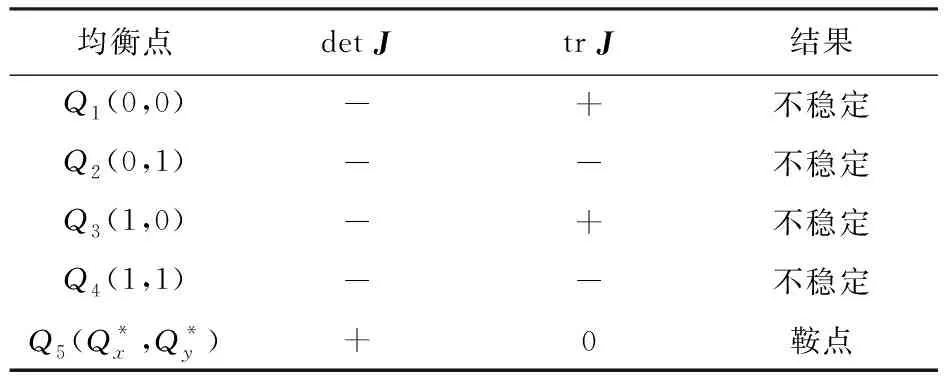

3 数值模拟与仿真分析

3.1 履行责任合作的收益对策略演化的影响
3.2 责任处罚对策略演化的影响
3.4 责任监督成本对政府策略行为演化的影响
3.5 责任激励成本对政府策略演化的影响
4 总 结
