一种智能化主动消防系统的研究
2022-10-15王庆娟周肖树赵刃
王庆娟,周肖树,赵刃
(1.北京理工大学珠海学院,广东 珠海 519088;2.珠海迈克芬科技有限公司,广东 珠海 519031)
0 引 言
近几年,各类火灾事故频发,严重威胁着人民群众的生命财产安全。为此,针对大型商业综合体、火灾重点单位、火灾高危单位、较小场所等采取更加严格的消防安全管控措施,以减少火灾隐患,降低火灾风险,在推动消防设备市场发展的同时,也对消防设备自动化和消防物联网平台的智能化提出了更高的要求。
火灾预防和早期扑灭是消防灭火所追求的目标。当前的火灾探测设备主要以烟感为主,建筑内的灭火装置多为喷淋装置,烟感属被动探测,火灾发生后,烟雾上升进入烟感传感器,达到一定浓度时才能触发烟雾报警,因此烟雾报警延迟较高,往往在相关人员接到烟雾报警时火势已经蔓延成大火。喷淋装置一般是在火灾发生后,室内温度上升到一定程度才能爆破喷淋,喷淋灭火方式是大面积散射式灭火,起不到精准灭火的目的。并且烟感传感器的报警可靠性向来不是太高。可以看出当前的火灾报警和灭火处理系统存在很大的漏洞,不能从根本上解决火灾的预防和早期灭火问题。
为此,本文开发一种智能化主动消防系统,该系统可以在火灾将要发生时及时给出预警,在火灾发生的初期迅速探测起火点的位置,并启动主动灭火系统,进行精准灭火。在火灾发生的初期迅速扑灭,这样不仅可以降低火灾的损失,同时由于火势较小,灭火成本也会很低,做到消灭火灾于萌芽状态。
1 消防系统的架构设计
智能化主动消防系统由消防机器人、主动探测系统和信息调度平台三个部分组成,系统框图如图1所示。
主动探测系统利用ZigBee技术实现对环境温湿度、烟雾状态和火焰状态的数据采集,并将数据传入信息调度平台。消防机器人安装有具备火焰识别功能的视频设备和灭火装置,并通过Wi-Fi模块与平台通信。信息调度平台负责对环境数据的显示,并将主动探测系统上报的异常数据及位置信息转发给消防机器人。
当有火灾发生时,火灾发生地点附近的主动探测器将检测到异常的环境数据,探测器将某位置的环境数据上报给信息监控系统,同时发出声光报警。信息监控系统会将火灾发生的地点等数据通过Wi-Fi模块传输给机器人,机器人接收到数据后,会迅速规划路径,移动到指定的火灾地点。机器人在移动的过程中会以超声波传感器避障,同时开启视觉识别模块,进行火焰的二次确认。机器人的视觉识别模块识别到火焰并完成定位后,控制喷头对准火源方向进行灭火操作。

图1 消防系统框图
2 主动探测系统
主动探测系统由上位机和下位机组成,下位机的硬件部分主要由ZigBee无线模块、温湿度传感器、火焰传感器、烟雾传感器和声光报警模块组成。本网络由一个协调器和多个终端设备组成,采用星状网络拓扑结构,如图2所示。每一个终端设备都搭载三种传感器和声光报警电路,协调器和上位机之间通过串口传输,上位机使用LabVIEW完成串口数据解析与存储。

图2 主动探测系统架构图
2.1 下位机的设计
选择TI公司的CC2530F256芯片作为无线网络的核心处理器,集成了51单片机的内核,具有256 kB闪存和8kB RAM的Zigbee,符合IEEE 802.15.4标准。CC2530片上系统结合了TI公司的ZigBee协议栈Z-Stack,提供一个强大和完整的ZigBee解决方案。
ZigBee网络中存在三种逻辑设备类型:协调器、路由器和终端设备。在星型网络中以协调器为中心,所有设备只能与协调器进行通信。
在本次实验中共使用三个终端设备进行环境火灾状态的主动探测。每一个终端设备都由一块CC2530搭载三种不同的传感器构成,利用Zigbee对系统中的各终端设备及协调器完成组网,程序流程如图3所示。
协调器创建网络后,按照一定算法为加入其网络的终端节点分配地址,完成ZigBee组网。组网成功后,在确认传感器正常工作的情况下,开始对环境状态进行实时监测,系统检测到的数据会实时上报给信息调度平台进行展示,同时对采集到的三种传感器数据做出判断,如有数据超过相应的阈值,则将发出火情报警声光信号,并将异常数据上报给信息调度平台。在上报的信息中除了终端设备标定的坐标信息外,还包括预估的火源坐标信息。
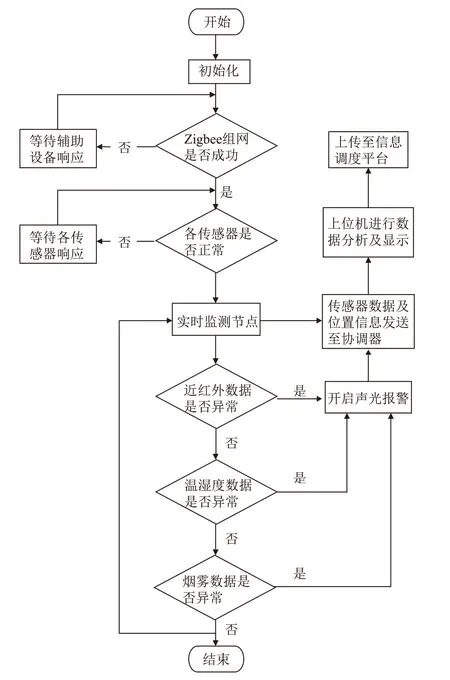
图3 主动探测系统软件流程图
本文使用近红外火焰探测器进行火焰检测,同时测得环境的温湿度和烟雾数据,对三种传感器数据进行分析后预判火情,以提高探测的及时性和准确度。火焰探测器由一组五个对称分布的近红外火焰传感器构成,探测波段为760 nm~1 100 nm的近红外波段。通过读取传感器的数据来判定着火点的方向,当监控范围内某一方位突然出现较强信号时,判断出该方位可能出现火情,此时该探测器将会通过信息调度平台转发火焰报警信息及位置信息给消防机器人。
实验模型样机的设计中使用DHT11数字温湿度传感器来采集环境中的温湿度数据。它采用专用的数字模块采集技术和温湿度传感技术,确保产品具有极高的可靠性和卓越的稳定性。温湿度传感器都是在极为精确的湿度校验室中进行校准,校准系数以程序的形式储存在OTP内存中,传感器内部在对检测信号的处理过程中要调用这些校准系数。传感器包括一个电容式感湿元件和一个NTC测温元件,并与一个高性能8位单片机相连接,采用单线制串行接口,系统集成便捷。但是DHT11的测温范围较小,在真机设计中将替换成动态范围更大的传感器(如SHT31)。
烟雾传感器为MQ-2,内部采用离子式N型半导体,处于200~300 ℃时,二氧化锡吸附空气中的氧,形成氧的负离子吸附,使半导体中的电子密度减少,从而使其电阻值增加。当烟雾传感器所处环境中存在可燃气体时,烟雾传感器的电导率随空气中可燃气体浓度的增加而增大。利用这一点就可以获得这种烟雾存在的信息,烟雾的浓度越大,导电率越高,输出电阻越低,输出的电压值越大。
MQ-2型传感器对天然气、液化石油气等烟雾有很高的灵敏度,尤其是对烷类烟雾更为敏感,具有良好的抗干扰性,可准确排除有刺激性非可燃性烟雾的干扰信息。MQ-2可输出模拟信号和数字信号,本设计使用模拟信号读入,在程序内增加阈值判断功能,进行报警处理。
协调器中负责把各终端设备上报的传感器数据通过串口转发至上位机。
2.2 上位机的设计
当上位机接收到下位机发来的数据后,解析和处理数据,并可视化传感器的数据。如有异常节点数据上报,确定数据库中是否存在该异常节点的信息,若没有,则将异常节点数据上传至数据库。
如图4所示为上位机交互界面,在测试中以编号001号的终端设备检测到火焰为例,当该设备的第一路火焰传感器检测到火焰时,在上位机中会显示该设备的标定位置坐标、火源坐标和当前的温湿度数值和烟雾状态,并发送至数据库中。在上位机中设置了显示串口数据和数据库数据。
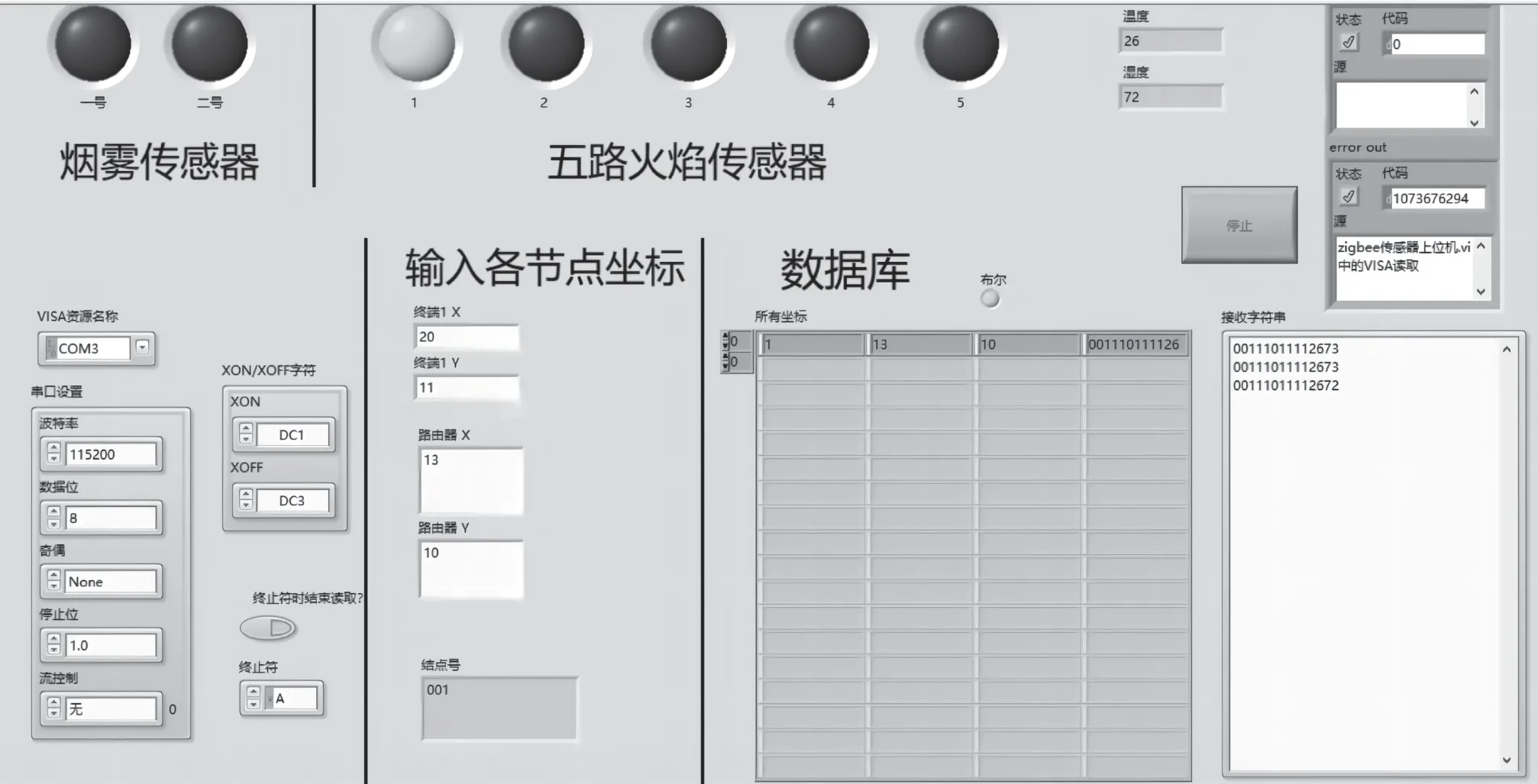
图4 主动探测系统上位机界面
3 消防机器人
消防机器人以NI公司的myRIO为核心控制器,基于图像化编程平台LabVIEW进行开发,通过Wi-Fi模块实现与平台的数据通信,主要由运动控制和视觉识别两个模块构成。
3.1 机器人运动控制模块
运动控制模块设置了手动和自动两种模式。在手动模式下,可以通过信息调度平台远程控制机器人的运动,借助摄像头观察周围环境,通过传输的视频判断火源的位置,并手动开启灭火装置实现灭火操作。
自动模式中包括自主避障、运动控制、状态监测和系统任务管理四个功能子模块。自主避障通过分析超声波传感器的数据实现;运动控制通过对电机、舵机、水泵和全向轮的控制实现,从而设计了自主路径规划、自动精准灭火以及自主泊位和注水等功能;状态监测主要完成对摄像头的控制,以及完成对机器人自身姿态、电压值和水位状态的监测;系统任务管理完成远程监控与运动规划的功能。
在自动模式下,主动探测系统检测到火灾后,判断报警点数量,当只有一个报警点时,服务器会将火源地址信息告知邻近的机器人,机器人接收到数据后会迅速地规划路径,并移动到指定的火灾地点。机器人在移动的过程中通过超声波传感器避障,同时打开视觉识别模块进行火焰检测和识别,完成火源定位后控制灭火装置实现灭火操作。在水位低于阈值但火源依然存在的情况下,则通知临近机器人前往增援。水位低于阈值的机器人则自动返回泊位补水。当报警点多于一个时,调度平台根据报警坐标与机器人的位置坐标进行匹配,按照就近原则指派机器人到达火源地点。
3.2 视觉识别
视觉识别的目的是对主动探测系统上报的火警信息进行二次确认,并通过将所得到的火焰坐标信息反馈给运动控制模块执行精准的灭火操作,以此提高灭火的效率。采用普通摄像头对火焰进行检测、识别和中心定位,使用NI VISON Assistant进行开发,根据火焰的颜色特征与圆形度两大静态特征对火焰进行识别。
首先获取摄像头图像。火焰具有特殊的颜色分布规律,在图像中调节RGB阈值分割出火焰轮廓,并完成图像的二值化处理。二值化后的图片包含较多的噪点,因此使用中值滤波器做平滑滤波处理。中值滤波器是一种非线性滤波器,它将领域内所有像素值按由小到大的顺序排列,取中间值作为中心像素点的输出值。中值滤波器的主要优点是算法简单易于实现,在处理随机噪声和脉冲噪声方面具有较好的效果。随后依次对图像做开运算和闭运算,去掉小的物体或空洞并平滑边界。完成以上流程后得出火焰轮廓,最后通过计算火焰圆弧度求出火焰中心坐标,识别的测试效果如图5所示。

图5 火焰定位算法测试图
4 信息调度平台
信息调度平台接收主动探测系统实时获取的现场数据,当数据超过阈值时进行火灾报警,提醒用户进行火灾处理。同时,平台对消防机器人进行监控,包括机器人的水箱水位、位置、电压等,以实现实时故障报备。
5 系统测试
为测试本系统的功能和响应时间,在十平米的实验室内部署三个终端设备进行实时探测,两台消防机器人等候信息调度平台的控制。测试开始前为三个终端设备标定位置信息,为机器人指定泊位信息,以点燃的蜡烛作为火源,将蜡烛放置于某个区域,测试中系统各模块运行正常,完成了预期的任务。测试表明从蜡烛点燃到被扑灭的过程只需30秒的时间。
6 结 论
本文设计了基于物联网平台的主动消防系统,其集火源探测、火灾预警、消防灭火、安防布控于一体,可精准定位火源;采用智能化消防系统平台,实现在线实时监控和可视化操作;在发现火源后消防机器人采取灭火行为的时间小于30 s,可以很好地降低火灾的发生概率,降低消防成本。
