鲁棒H∞控制在并联Buck变换器中的应用研究
2022-10-14孙维东伍孟涛闫小宇葛芦生
孙维东,伍孟涛,闫小宇,葛芦生
(安徽工业大学 电气与信息工程学院,安徽 马鞍山 243032)
0 引 言
现如今,随着电子设备被广泛使用,单模块、小容量的开关电源已经满足不了人的日常需求,由多个单模块电源并联组成的分布式电源不仅容量大、可靠性高,还可以根据需要配置成为冗余系统,实现电源的模块化。因此被广泛应用到航空航天、锅炉控制、微电网等领域中。但是,并联Buck变换器是一种强非线性系统,由于功率开关和储存器件、的存在使得其精确模型难以获得,运行过程中参数的摄动会影响到并联Buck变换器的动态性能,因此往往需要采用控制算法对其进行优化改进。传统的PID控制技术因其算法简单、控制效果较好、运行速度较快等优点被广泛运用到工业生产和生活中里,但是对于一些复杂、多变的应用场合中,例如电力电子、机器人控制等等,往往达不到期望的控制效果,因被控系统在进行PID控制器设计时,通常都是建立在模型精确的基础上,忽略了模型不确定性和参数不确定性所带来的系统动态响应衰落,不能够进一步优化提升并联Buck变换器。因此,近些年人们提出了将一些先进控制算法应用到电力电子技术领域中去提高系统的动态性能,例如自适应控制、滑模控制、鲁棒控制等,而本文根据文献[2]采用状态反馈鲁棒控制的方法,同时与LMI技术相结合,并对系统的区域极点进行约束,这样不仅能够应用到基于不确定模型的并联Buck变换器中,还可以改善其动态响应,增强抗干扰能力,实现并联均流控制。
本文将鲁棒控制算法运用到了并联Buck变换器中,建立了LPV模型,并将控制问题转成了LMI问题,便于计算和求解,再结合区域极点配置,当发生负载突变的情况时,通过与传统的双闭环PI控制效果作对比,研究在仿真下两种控制算法的优劣性,最终验证设计的可行性和有效性。
1 并联Buck变换器的LPV表示
1.1 并联Buck变换器建模
本文采用的是并联Buck同步整流变换器,将续流二极管换成开关管MOSFET可以提高电路工作效率,且能够使变换器在一个开关周期内始终处于电流连续导通状态下(CCM模式),其电路拓扑如图1所示。
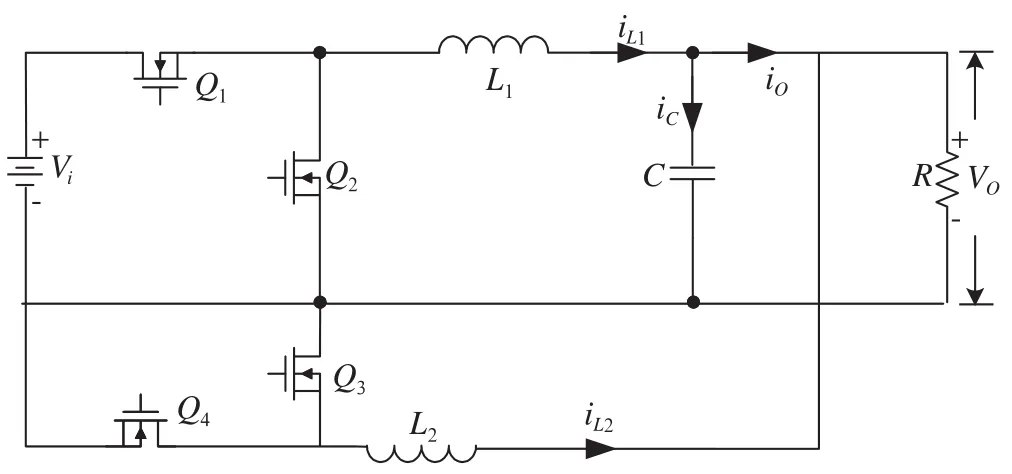
图1 并联Buck变换器拓扑图

1.2 LPV系统
LPV系统又被称为线性变参数系统,极其依赖于未知却可以测量的系统参数,也可以描述非线性系统,并且由于近年来其理论不算完善,已经被用来与鲁棒控制相融合来解决系统的鲁棒性问题。1988年,Shamma提出了LPV系统的状态空间表达式。

其中,()是被控系统的状态变量,()是被控系统的输入量,()是被控系统的输出量,()是时变参数的序列()=((),…,p()),这些时变参数会随时间变化从而改变系统矩阵,进一步影响到系统的工作性能。在本文中并联Buck变换器负载电阻这些已知的参数将会作为时变序列()的主要成分,且让要未知参数在给定范围内变化,并且能够测量,满足系统控制要求。
1.3 LPV系统的多胞体形式
多胞体模型一种常见的LPV系统,也是一种凸集合,能够将有限的顶点矩阵限制在多胞体内,不需要对多胞体内的所有点进行设计,极大简化了系统模型,也使得计算过程变得简单和高效,在对不确定模型进行分析时经常与LMI问题相结合,其拥有=2个顶点。把式(2)中系统模型的矩阵转化成如下:

()是在拥有顶点(V),=1,…,的多胞体模型中,并对()进行凸优化分解,得到了:

将上面的公式进行整理后,可以得到系统的具体形式为:

式(5)是LPV系统的多胞体表达形式。其系统矩阵能够在多胞体内随时间而变化。参数矩阵可表现为:

其中代表多胞体顶点矩阵的数量,v则代表顶点矩阵。
2 鲁棒H∞ 控制器的设计
利用LMI问题的相关理论,限制范数的最小值,并通过区域极点配置来设计以一个鲁棒控制器时并联Buck变换器获得良好的动态性能。

3 仿真与验证
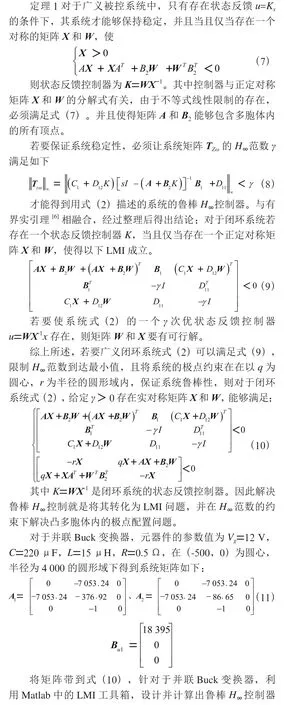
为了验证使用鲁棒控制器所得到的系统动态响应要优于双闭环PI控制器,于是在仿真软件Matlab/Simulink中搭建了鲁棒控制和双闭环PI控制的并联Buck仿真模型,其中所设定的并联Buck变换器具体参数为V=12 V,V=2.5 V,=220 μF,==15 μH,=0.5 Ω。 并 联Buck变换器仿真原理图和鲁棒控制系统模型如图2和图3所示。
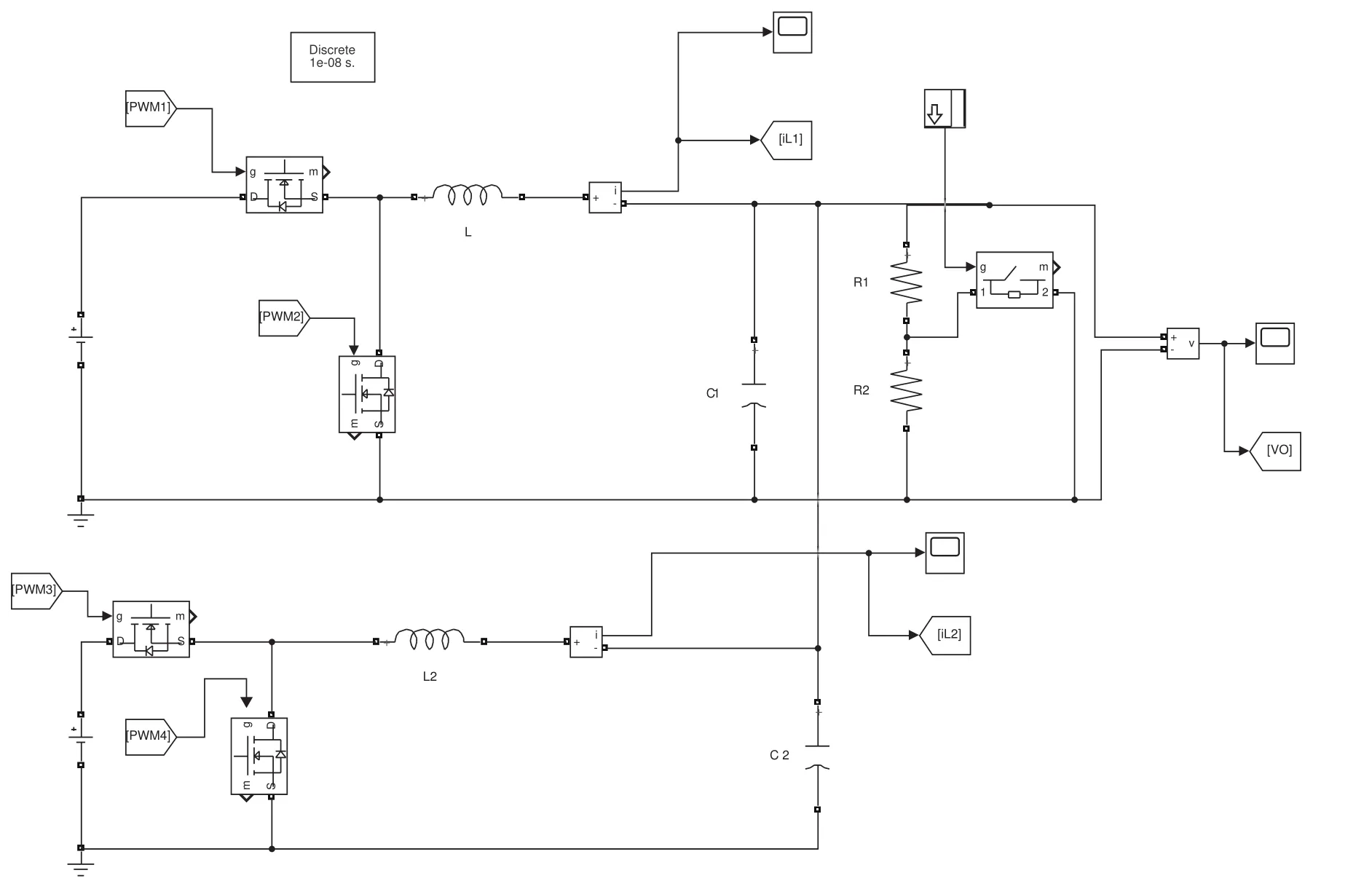
图2 并联Buck变换器仿真原理图
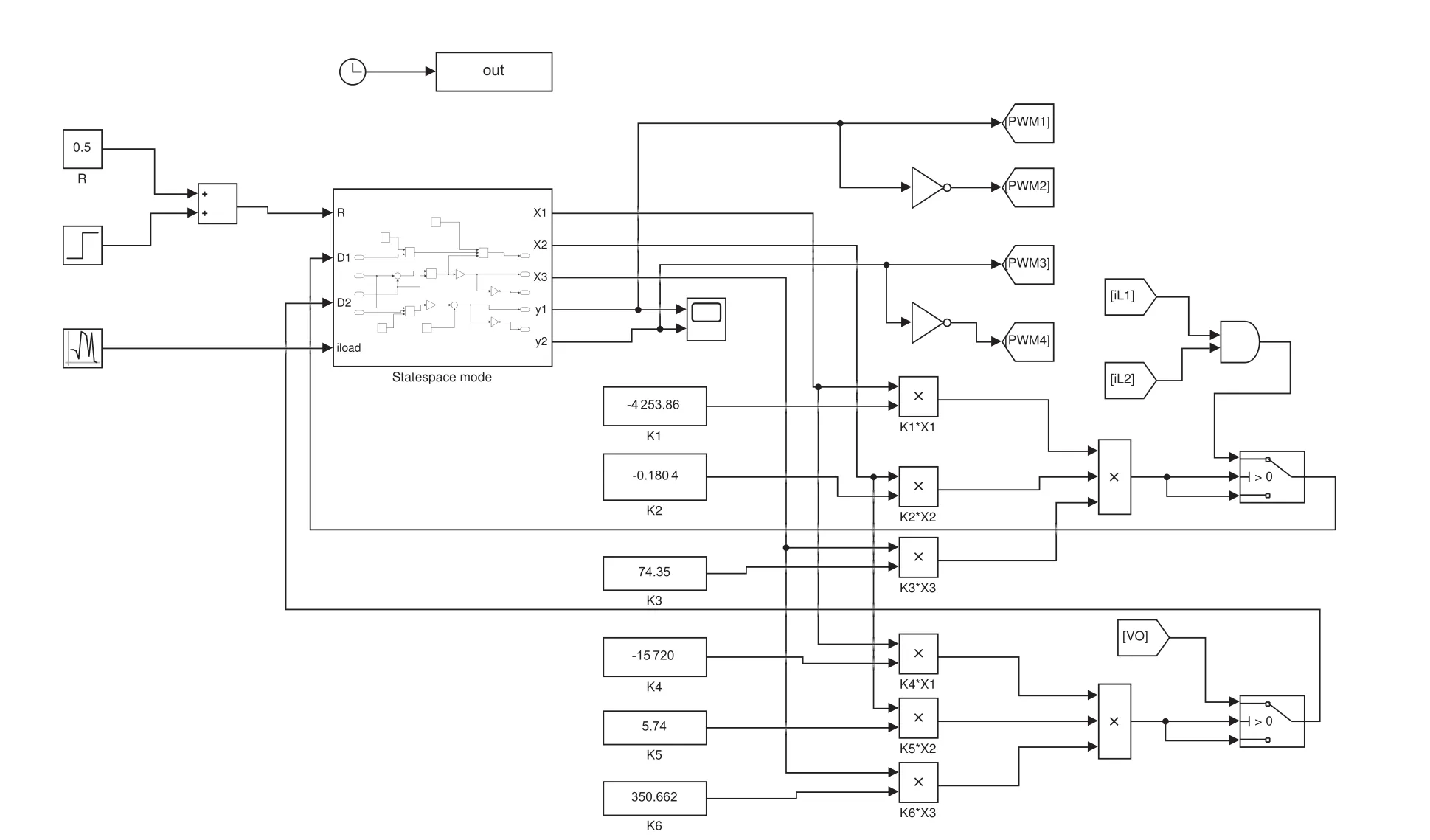
图3 鲁棒H∞ 控制系统模型
本文采用了电压外环和电流内环相结合的双闭环PI控制算法,经过计算与整定后得到电压外环参数K=6.035 1,K=529 59,电流内环的参数K=10 224,K=0.632 0,当负载突变时,作用到并联Buck变换器上的双闭环PI控制器和鲁棒控制器所得到动态仿真波形如图4、图5、图6所示。
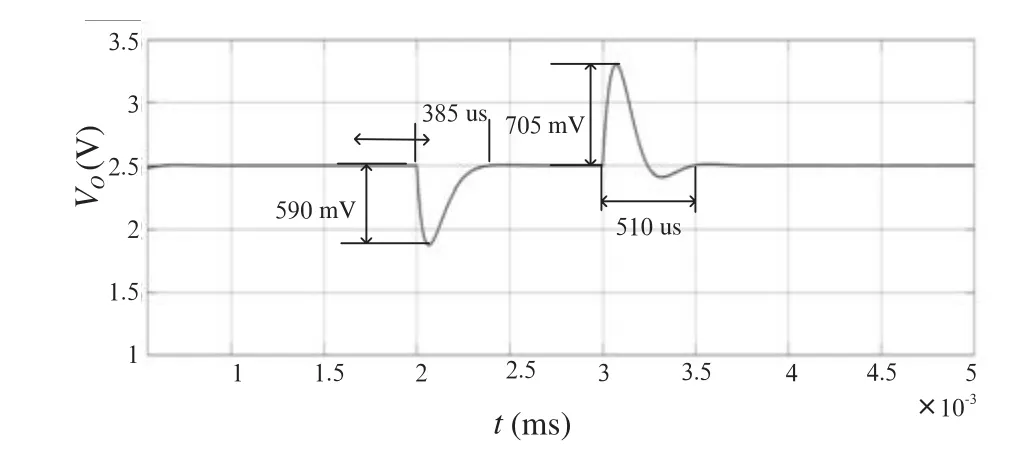
图4 PI控制并联Buck变换器负载突变时输出电压波形
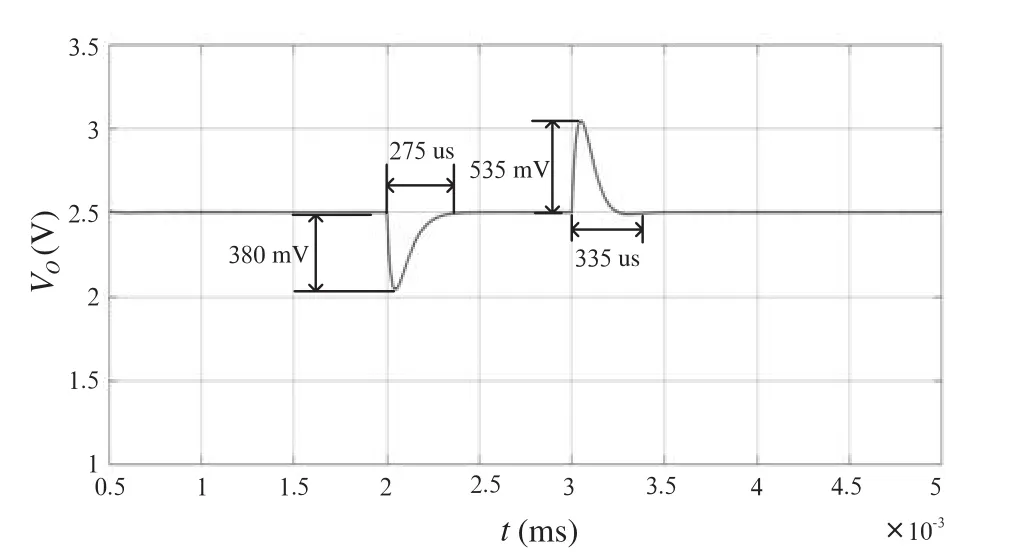
图5 鲁棒H∞ 控制并联Buck负载突变时输出电压波形
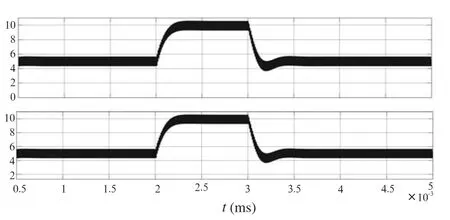
图6 鲁棒H∞ 控制并联Buck负载突变时电感电流波形
本文通过对比当负载突变时,系统在加载和减载的过程中输出电压由动态恢复到稳定状态的调节时间和最大波动量来比较两种控制算法的控制效果。从图4、5中可以看出,基于双闭环PI控制的并联Buck变换器在负载从0.5 Ω突变到0.25 Ω的加载过程中,输出电压的最大波动量为590 mV,恢复到稳态的时间为385 us,而基于鲁棒控制的并联Buck变换器此时的最大波动量为380 mV,调节时间为275 us,相比于双闭环PI控制器,其最大波动量减少了210 mV,调节时间减少了110 us,减载过程中鲁棒控制器则是最大波动了减少了170 mV,调节时间减少了175 us。而图6表明了鲁棒控制算法能使并联的2个Buck变换器的电感电流始终保持同步变化,无论是在稳态还是动态情况下,因此验证了鲁棒控制器比双闭环PI控制器更具有优越性,能够使并联Buck变换器拥有更好的动态性能,同时也能够实现并联变换器的均流控制,证明了本文设计是可行且有效。
4 结 论
本文首先利用状态空间法对并联Buck变换器进行了建模,并在LPV模型下,将鲁棒控制与LMI技术相结合,把鲁棒控制问题转换为LMI问题,设计出鲁棒控制器,通过对比与仿真实验,验证了当负载突变时鲁棒控制的并联Buck变换器最大波动量和调节时间都有所下降和减少,保证了系统的抗干扰能力和鲁棒性,同时也实现了均流控制。
