基于动态时间规整和长短期记忆的空中交通流量短期预测
2022-10-13宋维凯张洪海万俊强周锦伦
宋维凯, 张洪海, 万俊强, 周锦伦
(南京航空航天大学民航学院, 南京 211106)
空中交通流量短期预测是空中交通流量管理的基础性问题,通过准确地预测空中交通流量,有助于掌握空域发展态势,为空中交通管理人员提供决策支持,缓解空中交通拥堵问题,提高空域运行效率。
目前针对空中交通流短期预测的方法主要有两类,一类方法是通过交通流参数建立数学模型,描述交通流的变化情况,如非参数回归等; 另一类方法基于历史数据,挖掘数据隐含的信息,如机器学习等[1]。空中交通流具有非线性特征[2],杨阳[3]证明了流量时间序列的混沌特性,提出基于回声状态网络的流量短期预测方法;王飞等[4]应用集合经验模态分解方法将流量时序分为若干分量,对不同分量采用不同方法进行预测,通过对预测结果集成得到预测值;王飞等[5]利用交通流时间序列的周期性,采用分形插值的方法构建预测日的迭代函数系,实现对扇区流量的短期预测。这些模型方法利用交通流的非线性、自相似性等特征,取得了良好的预测效果,但没有考虑交通流的时空相关性。
深度学习作为一种新的机器学习方法,近年来受到学者的广泛关注,它能够更加深入地挖掘数据关系,在处理非线性数据方面具有良好效果,被越来越多的应用在交通流预测中。在地面交通领域,李明明等[6]将长短期记忆(long short-term memory, LSTM)与反向传播(back propagation, BP)神经网络组合,建立短期交通流时间序列分析及预测模型;王康[7]基于深度学习考虑拥堵特征对城市交通拥堵进行预测;于德新等[8]提出一种基于门控循环单元与循环神经网络的短时流量预测模型,提升交叉口短时交通流预测精度;张涵[9]用卷积神经网络(convolutional neural network, CNN)层提取时间特征,LSTM层预测流量,构建CNN与LSTM组合预测模型;陶璐[10]考虑路网空间拓扑结构及交通流时空特性,构建基于深度学习方法的城市路网短时交通流预测模型。
在空中交通领域,深度学习被越来越多的用于航路网络交通流预测中,Lin等[11]通过分析相邻区域的空间相关性和给定区域历史交通的时间相关性,利用卷积LSTM模块预测空中交通流量;Yang等[12]提出了一种具有三向时间特征的混合时空卷积长短时记忆网络,用于预测航路拥堵指数;李桂毅等[13]依据航段交通流相关性,建立基于多维标度法与LSTM的航路网络短时交通流预测模型。
航路网络中交通流复杂多变,相互关联,交通流的时变特性与路网的空间分布使得交通流有明显的时空属性[14]。交通流的时间相关性是指同一区域当前时段交通流与过去时段交通流存在相关性,空间相关性是指相同时段内交通流空间分布的相关性。通过综合利用交通流的时间与空间特性,更深入地挖掘交通流特征,提高流量预测结果的准确性。
现综合利用交通流的时间与空间相关性进行扇区流量预测,首先对空中交通流的时空相关性进行分析,然后采用动态时间规整(dynamic time warping, DTW)算法计算扇区之间的空间相关性;其次,将空间相关性较高扇区的时间序列作为输入特征,利用扇区的时间相关性构造时间序列长度不同的数据集;最后,将组合的时空数据采用LSTM模型训练,实现扇区的流量预测。
1 空中交通流时空相关性分析
1.1 时间相关性
交通流变化具有周期性、相似性与连贯性。航班计划按时间维度可划分为季度航班计划、月度航班计划等,航班的班期一般按周确定执行的天数,由于航班计划具有周期性,因此对于同一个季度的相同周、天,交通流数据具有相似性。
如图1所示为广州区域AR04扇区2019年5月1日交通流数据,一天当中交通流不断变化,在白天航班量较多,流量随时间波动性较强,在夜间航班量较少,流量变化趋于平缓。虽然空中交通流量受天气、空域限制等多种因素的影响,但当前时段的交通流量与前几个时段的交通流量有着必然联系。由此可知交通流具有明显时变性与连贯性。
通过交通流时间相关性的分析可知,利用交通流的周期性、相似性与连贯性,可以使用历史的交通流数据对将来一段时间交通流量进行预测。
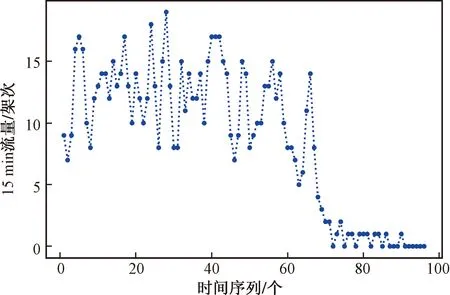
图1 AR04扇区交通流日变化曲线Fig.1 Daily traffic flow variation curve of AR04 sector
1.2 空间相关性
空中交通网络错综复杂,大量航路航段连接构成航路网络,航路之间存在着相互联系。由于扇区通过航路相互连接,因此扇区之间也存在相互关联,上游扇区的交通状态会对下游扇区的交通状态产生直接影响,本扇区交通状态变化的影响也会传播至其他扇区。
扇区交通流数据实际上是交通流变化的时间序列,研究扇区的空间相关性实质上就是探索交通流数据变化的相关性。因此,可以利用扇区交通流时间序列计算扇区之间的相关性,将相关性较高的扇区纳入预测模型,加入更多的空间信息,更能够有效地预测短期空中交通流量。
2 DTW-LSTM流量预测模型
2.1 DTW算法
DTW算法常用于处理时间序列相似性问题,通过在时间轴上的延伸或收缩实现两个时间序列的相似性度量。相较于传统的欧氏距离测度方法,DTW算法不要求两个序列完全对齐,克服了时间扭曲问题。DTW的求解采用动态规划思想,在两个时间序列构成的邻接矩阵中找到一条规整路径,使得规整路径的总代价最小,所得路径距离越小,时序相似性越高。
对于两个长度分别为N的时间序列P=(p1,p2,…,pN),Q=(q1,q2,…,qN),定义一条规整路径W=(w1,w2,…,wL),其中W的第i个元素wi=(ni,mi),其中1≤ni≤N,1≤mi≤N,1≤i≤L。
DTW所选择的路径需要满足以下条件。
(1)边界条件。w1=(1,1),wL=(N,N),即将两序列的起始数据与最后一个数据分别对齐。
(2)单调性。单调性是保证路径上的点随着时间的推移是单调变化的,W上相邻的两点wi=(ni,mi)与wi+1=(ni+1,mi+1)应满足ni+1-ni≥0且mi+1-mi≥0。
(3)连续性。规整路径W中点wi=(ni,mi)与wi+1=(ni+1,mi+1)应满足ni+1-ni≤1且mi+1-mi≤1,以保证当前点只能与相邻的点进行匹配。
满足以上条件的规整路径有多条,DTW的目标是求序列P与Q之间最小的规整路径总代价,表达式为
(1)
式(1)中:d(pni,qmi)=|pni-qmi|,表示点pni与点qmi之间的规整路径代价;DTW(P,Q)为序列P与Q之间的最小规整路径总代价。
采用动态规划思想求解最优规整路径,定义累加距离dDTW,从点(0, 0)开始对序列P与Q进行匹配,每到下一个点都会对之前的点距离进行累积,在最后一个点(pN,qN)求得的累加距离即为最优规整路径的代价总和,可用于衡量时间序列P与Q之间的相似程度。累加距离计算过程表达式为
dDTW(pi,qj)=d(pi,qj)+min{dDTW(pi-1,qj),dDTW(pi,qj-1),dDTW(pi-1,qj-1)}
(2)
式(2)中:dDTW(pi,qj)为从起点到点(pi,qj)的规整路径距离。
因此,通过DTW算法研究扇区时间序列的相似性以衡量扇区的空间相关性,若两扇区交通流时间序列的相似性越高,则扇区的空间相关性越高。
2.2 LSTM模型原理及构建
长短期记忆神经网络是循环神经网络(recurrent neural network,RNN)的进一步改进,LSTM通过引入记忆块单元,解决了RNN存在的梯度消失或梯度爆炸问题,使循环神经网络能够有效地利用长距离的时序信息,在处理时间序列问题方面具有较好的效果。因此,使用LSTM模型能够较好地利用交通流的时间相关性。
LSTM的基本结构主要由遗忘门、输入门与输出门组成[15-16],如图2所示。

图2 LSTM单元结构Fig.2 Structure of LSTM cell
遗忘门决定上一阶段有多少信息可以保留。输出值范围为[0, 1],越接近1则上一阶段保留的信息越多,越接近0则保留的越少,其表达式为
ft=σ(Wf[yt-1,xt]+bf)
(3)
式(3)中:σ为sigmoid激活函数;Wf为遗忘门权值向量;yt-1为t-1时刻输出;xt为t时刻输入;bf为遗忘门偏置;ft为t时刻遗忘激活。
输入门决定将当前多少输入信息保存在记忆单元,并对细胞状态进行更新,其表达式为

(4)

(5)

输出门决定当前时刻的输入,其表达式为
Ot=σ(Wο[yt-1,xt]+bo)
(6)
yt=OttanhCt
(7)
式中:Wo为输出门权值向量;bo为输出门偏置项;Ot为输出门激活;yt为t时刻输出。
LSTM模型构建包括如下步骤:首先,对原始数据预处理并划分数据集;其次,确定训练目标,构建LSTM模型并确定LSTM训练模型的参数;最后,使用预测集数据检验模型。LSTM模型存在一个输入对应一个输出、多个输入对应一个输出等多种应用方式。采用多个输入对应一个输出的方式,将预测时间段前的n个时间段流量值作为输入,预测时间段的流量值作为输出,因此需将输入数据处理为n维数据。为加快训练的收敛,还需将原始数据进行归一化处理。
构建LSTM模型需要设置的参数有输入序列长度、输入层维数、隐藏层维数、输出变量维数等。输入序列的长度决定预测使用的时间长度,输入序列的长度越长,则表示输入数据包含越多的历史信息。输入层维数决定输入的特征数,在本文模型中,若输入层维数为1表示仅使用本扇区历史数据预测,维数大于1表示使用多个扇区历史数据预测。隐藏层维数表示隐藏层的神经单元个数,本文模型的隐藏层由单层LSTM与Dense层构成。本文模型预测值为未来一个时间段的交通流量值,因此输出层维数为1。
2.3 模型误差评价
为了衡量预测结果的性能,采用平均绝对误差(mean absolute error, MAE)、均方根误差(root mean squared error, RMSE)作为评价依据。

(8)

(9)

2.4 预测步骤
步骤1选择扇区作为流量短期预测的对象,确定为目标扇区。
步骤2由扇区流量的时间序列,计算各邻近扇区与目标扇区的DTW距离,按照数值由小到大进行排列,表示空间相关性的依次减弱。
步骤3选取与目标扇区空间相关性最强的前K个扇区与目标扇区构造训练数据集,将数据集分别划分为训练集、验证集与测试集。
步骤4构建LSTM模型,确定LSTM模型训练参数,包括输入序列长度、迭代次数等。
步骤5使用预测集对训练后模型进行预测,对预测结果进行误差分析。
步骤6选取不同的输入序列长度与扇区数据进行组合,重复步骤4与步骤5。
步骤7选取最优参数组合结果作为模型输出。
3 算例分析
为验证模型的可行性,算例选取2019年5月1—28日广州区域ZGGGAR01-ZGGGAR06共6个扇区的自动相关监视(automatic dependent surveillance-broadcast, ADS-B)数据进行实验,原始数据采用协调世界时(coordinated universal time,UTC)时间。实验在Python3.8环境中使用基于TensorFlow的Keras深度学习网络框架搭建训练模型。以ZGGGAR04扇区为目标扇区,利用建立的模型对该扇区流量进行预测。实验选择前24 d数据作为训练集,25—27日数据为验证集,28日数据作为测试集,设置模型的最小批尺寸为50,最大训练轮数为30。
3.1 数据预处理
由获取到的各扇区地理边界信息,得到每个扇区的空域范围,6个扇区空域结构如图3所示。利用边界信息对ADS-B原始数据进行筛选,得到每个扇区内的航迹点数据,以15 min尺度统计航班量,得到各个扇区每日流量的时间序列。图4为5月1日ZGGGAR01-ZGGGAR06扇区流量变化曲线。

图3 扇区空域结构图Fig.3 Diagram of sector airspace structure

图4 5月1日各扇区流量曲线Fig.4 Sector flow curve on May 1
3.2 扇区相似性度量
以ZGGGAR04为目标扇区,根据2.1节所述DTW计算方法,计算DTW距离衡量目标扇区与其他扇区之间的空间相关性,所得DTW距离越小,则与目标扇区相似度越高,反之,相似性越低。DTW距离计算结果如图5所示。
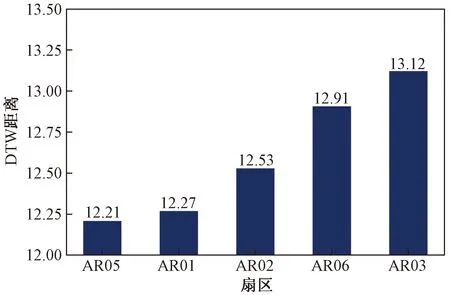
图5 DTW距离计算结果Fig.5 DTW distance calculation result
如图5所示,ZGGGAR05扇区与ZGGGAR04扇区最为相似,从空域结构看,两扇区相邻,说明相邻扇区的空间相关性较大,符合实际情况;其次是ZGGGAR01扇区,这是由于ZGGGAR01虽不与ZGGGAR04直接相邻,但存在连接两个扇区的航路,因此具有相关性。
3.3 预测结果分析
以下一个15 min的扇区流量作为预测目标,选取不同时间与空间参数的组合进行预测,其中空间参数是指与目标扇区具有空间相关性的扇区构成的扇区组合,时间参数是指预测模型输入的时间序列长度。不同时空参数组合的评价结果,如表1所示。
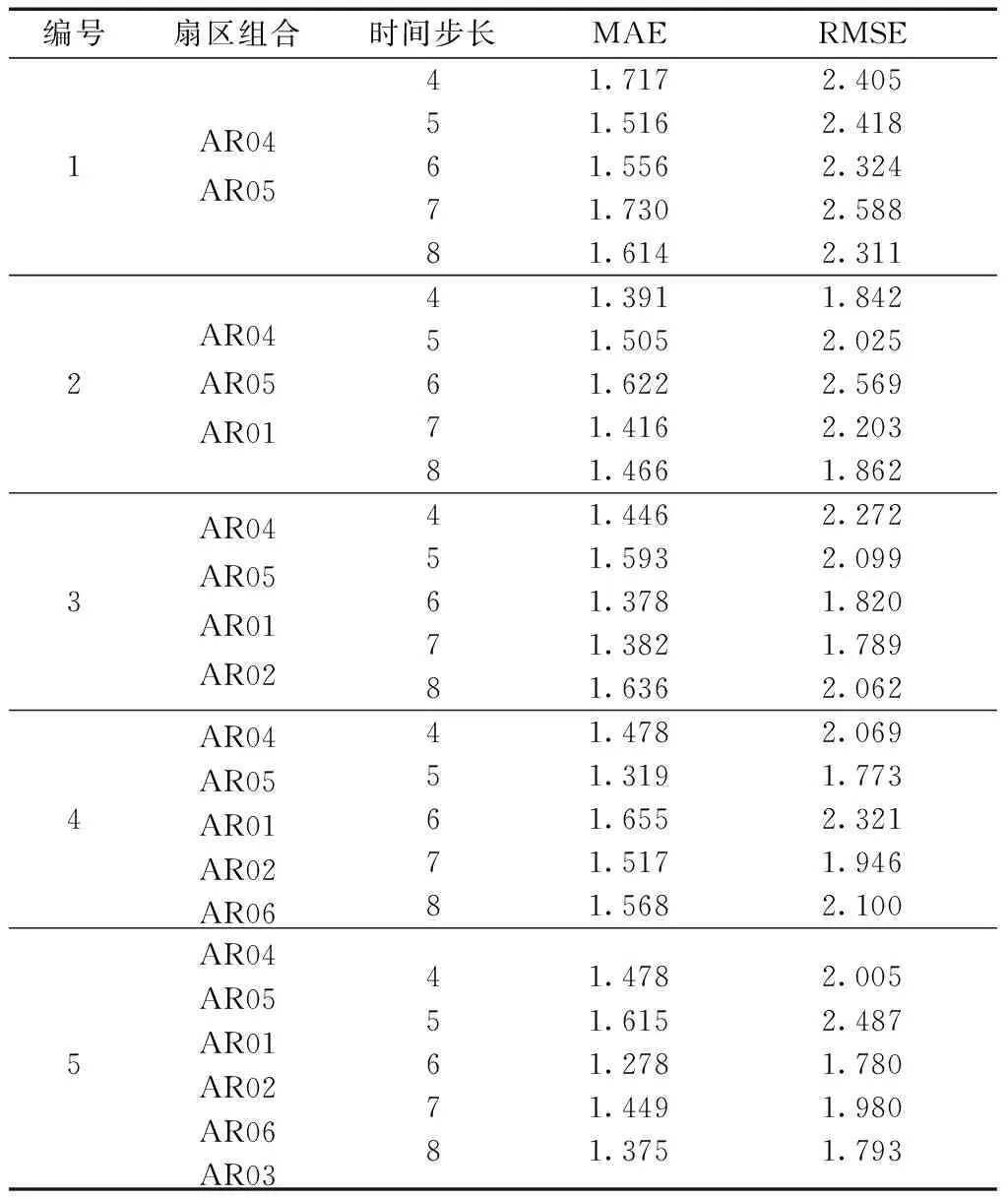
表1 不同时空参数下预测性能评价结果Table 1 Prediction performance evaluation results under different spatio-temporal parameters
在设置的模型参数下,每轮模型训练平均耗时约15 s,满足流量短期预测对时间效率的要求。对不同时空参数组合的预测结果分析可知,在同一扇区组合中,随着输入时间步长的增加,在一定范围内,模型预测结果的精度在提高,但输入的时间步长过长,模型的预测精度会有所下降,这是由于较长的时间序列虽然包含较多的历史信息,但也会加入无用数据,降低模型的预测精度,同时也增加了模型的训练时长;在时间步长一定时,随着选取相关扇区数量的不同,模型的精度也出现波动,当选取相关扇区数量较少时,模型中包含的空间信息较少,模型预测结果欠佳,当选取的扇区数量过多时,输入数据包含了无关的空间信息,干扰模型的预测效果。最终选取时间步长为6的第5组扇区组合作为模型的最优时空参数组合,此时预测结果的MAE为1.278,RMSE为1.780。
3.4 预测结果对比
为进一步研究本文模型的预测性能,分别采用LSTM模型、时空相关性SVR模型进行多次实验,选取模型的最优结果作为输出,各模型的预测结果如图6所示。
如表2所示,本文模型性能指标均优于LSTM模型与时空相关SVR模型,相比LSTM模型,MAE降低24.5%,RMSE降低31.4%;相比时空相关SVR模型,MAE降低36.4%,RMSE降低30.6%。本文模型与LSTM模型均为深度学习模型,相比于时空相关SVR模型,预测精度更高,说明深度学习能更加深入地学习数据关系;LSTM模型预测精度低于本文模型,这是由于LSTM模型未考虑空间相关性,说明交通流空间信息的加入有助于提高预测结果准确性。
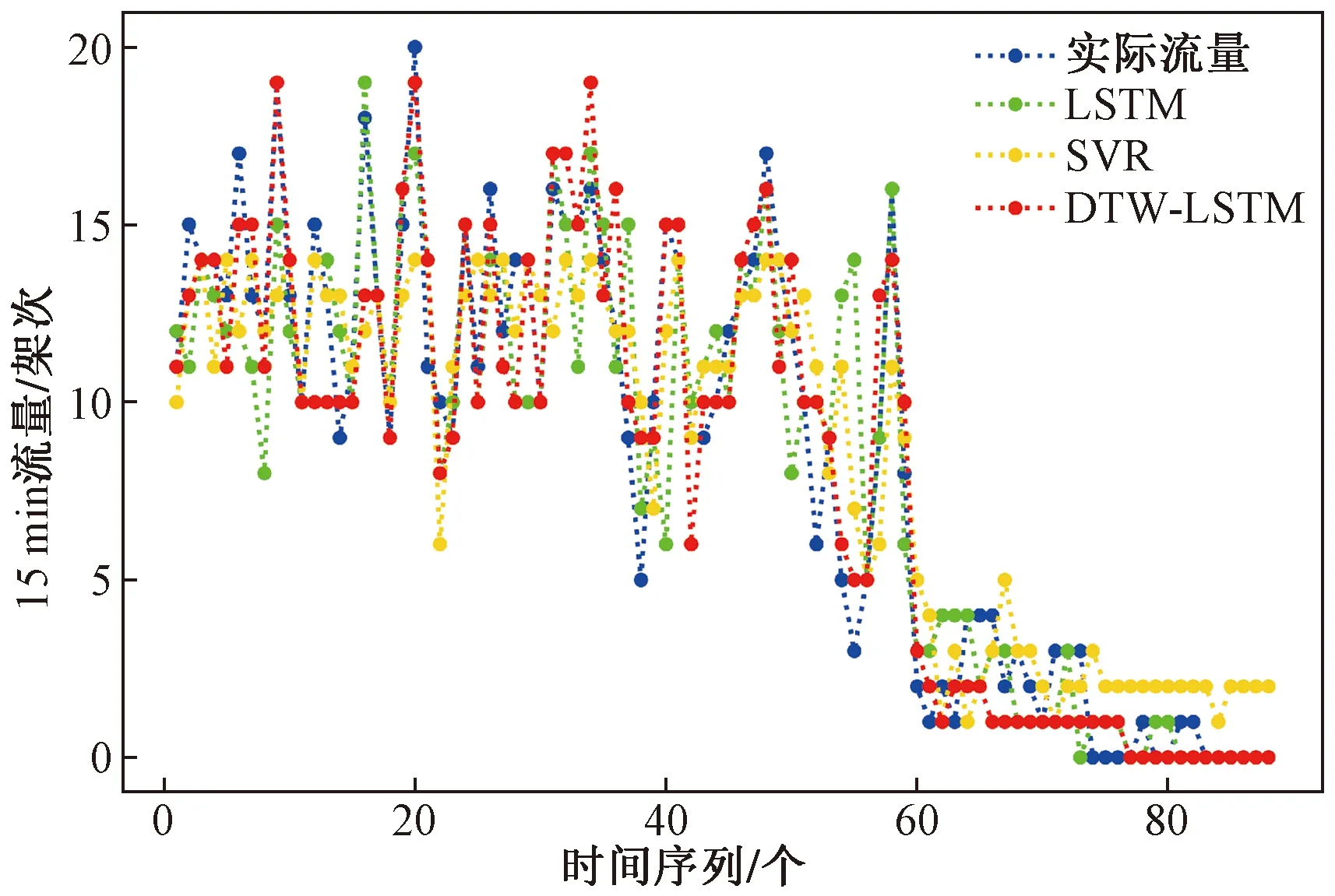
图6 不同模型流量预测结果Fig.6 Flow prediction results of different models

表2 不同模型性能评价结果Table 2 Performance evaluation results of different models
4 结论
(1)提出的空中交通流量短期预测模型利用了空中交通流的时空相关性,采用深度学习方法更加深入地挖掘数据关系,提升了流量预测结果的准确性。
(2)模型的时空参数对预测结果有着重要影响。在一定范围内,随着时间步长的增大,模型的预测精度逐渐增大,但时间步长过长会增加无关信息,导致预测精度下降;对于空间参数,较少的相关扇区会由于信息过少导致预测精度不高,过多的扇区会加入无关空间信息干扰预测结果。
(3)所提出模型的预测结果相比LSTM模型、考虑时空相关SVR模型的准确性有所提高。LSTM模型仅利用时间相关性进行流量预测,但未考虑空间相关性,因此预测结果精度低于本文模型;时空相关性SVR模型,虽综合考虑了时空相关性,但相比于深度学习方法,SVR方法挖掘数据关系不够充分。
(4)在后续研究中可尝试对模型进一步改进,寻找最优的参数组合,提高模型的预测精度。此外,本文只是在扇区层面进行流量预测,对于航路网络中航段之间的时空相关性流量预测还需要进一步研究。
