无人机倾斜摄影建模技术在施工中的应用
2022-10-12马明磊
刘 萍,白 洁,马明磊
(中国建筑第八工程局有限公司,上海 200122)
1 概述
无人机倾斜摄影是数字摄影测量技术中的重要分支,其发展得益于摄影数据处理技术与摄影设备技术的进步。摄影数据处理技术经历模拟摄影测量、解析摄影测量和数字测量3个阶段,随着计算机技术快速发展,数字摄影测量已成为摄影测量发展的主流方向。以上3种摄影测量技术的共同点为需要寻找同名点,区别为识别同名点的方式不同。模拟摄影测量和解析摄影测量通过人眼识别同名像点,受限于人的工作效率,不适于大面积摄影测量。数字摄影测量利用计算机代替人眼寻找同名点、实现对同名像点的量测及建立立体模型,从而大幅提高摄影测量的工作效率,实现自动化测图。
无人机具有重量轻、体积小、造价低、隐蔽性好等优点。无人机按外形结构主要分为三类:固定翼无人机、多旋翼无人机和无人直升机。固定翼无人机尺寸大、载重大、续航长、航程远、飞行速度快、飞行高度高,但受起降场地限制无法悬停,适合大范围、精度要求稍低的地形测量;多旋翼无人机尺寸小,操作灵活,结构简便,价格低廉,但有效荷载小、续航时间短,一般通过更换电池的方式,适用于城市片区高精度建模、测绘的需求,是目前无人机市场的热点;无人直升机荷载和航时介于两者之间,起降受场地限制少,但结构复杂、故障率高,应用较少。
2 系统组成
无人机倾斜摄影建模系统主要包括无人机、无镜头相机、导航系统(GNSS)、实景建模软件。GNSS用于布设像控点及检查点,可大大提高模型的绝对精度并检测成果精度;无人机搭载五镜头相机进行航测,与单镜头相比可同时拍摄5个方向的影像,更加高效;实景建模软件可自动化生成三维实景模型,并输出比对点精度比对、简单土方量计算等附加功能。
3 工作流程
无人机倾斜摄影建模工作主要分为外业航飞和内业数据处理2个方面,外业航飞包括航线规划、布设像控、航摄飞行,内业数据处理包括自动空三、密集匹配、构建TIN、纹理映射和实景模型。一般无人机遥控器可根据航高、像片重叠度进行自动航线规划。像片重叠度需根据测图需求在规定范围内进行选择。航向重叠度一般要求60%~65%,最小不得小于53%;旁向重叠度要求30%~40%,最小不得小于15%。
4 关键参数计算
在实际工程中,一般根据所需模型精度确定航高。不同类型工程对于倾斜摄影模型的分辨率及比例尺的需求不同,需结合实际需求确定倾斜摄影模型分辨率目标。倾斜摄影模型目标分辨率的实现涉及比例尺、航高、镜头焦距、镜头像元尺寸等因素。因涉及因素较多,实际工作中常出现概念不清或多方表述不一致,导致沟通障碍和工作偏差的问题。航线设计以数字正射影像地面分辨率为出发点,先由成图比例尺确定数字正射影像地面分辨率,进而确定航高。其中像元尺寸为镜头传感器宽度与宽度最大像素数的比值,同时也等于镜头传感器高度与高度最大像素数的比值。利用镜头焦距、数字正射影像地面分辨率、像元尺寸可计算航高,从而确定航飞高度。
成图比例尺与数字正射影像的地面分辨率的关系按照GB/T 35637—2017《城市测绘基本技术要求》进行换算。而最终实景模型分辨率约为数字正射影像地面分辨率的3倍。
以睿铂D2 PSDK五镜头相机为例,目标模型分辨率0.05m,经计算可得,航高不应高于106m,可方便高效地确定设备参数是否满足实际测绘需求。
5 应用方向
5.1 施工场地数字踏勘
设计院基于场地原始数据因更新不及时等因素常与现场实际情况有一定出入,导致各方沟通偏差,施工时出现与设计不一致等需返工的情况,影响施工进度。传统踏勘方式采用拍照、地图标注等手段,费时费力且效果不直观。
采用无人机倾斜摄影建模方式进行数字化踏勘,可进行场地查看与测量,并通过设计图纸与实景三维模型进行叠加。可直观看到设计与实际情况是否一致,各方基于模型沟通一目了然,避免返工。模型可立体量测,方便进行初步施工场地测量了解,同时进行二维、三维临设设计。
5.2 施工组织方案BIM设计
常规进行施工组织方案BIM设计时受限于人工信息采集方式,缺乏原始地块、周边环境的最新实景三维信息,难以周全考虑施工场地与周边的关系,造成方案实施过程中可能出现与周边冲突导致返工的情况。
应用无人机倾斜摄影建模可直观、精细地反映真实施工环境,作为施工组织方案BIM设计的三维底图,模型与BIM设计方案融合,将施工过程与场地周边提前碰撞模拟,以编制科学周密的施工组织方案。
5.3 城市更新深化及优化设计
建筑深化设计目前主要是由施工单位完成。特别是城市更新项目中常出现设计院图纸模型与实际建筑存在偏差的问题。基于三维实景模型,施工方可精细比对、叠加比对设计模型与实景模型,在施工前发现偏差之处,并预判设计不合理之处进行优化设计,避免施工过程中返工,节约工程造价,节省工期。
5.4 施工进度可视化记录管理
施工进度管控是施工管理的重要方面,也是众参与方关注的重点之一。传统拍照、拍视频记录的方式有一定直观性,但与三维实景模型相比其可视化操作不够灵活、完整。
采用无人机倾斜摄影建模,按工程需求,每隔一段时间建立施工现场三维实景模型,可直观、完整地检查施工进度,与设计模型、前期三维实景模型进行对比检查,方便各施工参与方沟通。同时作为施工过程重要档案资料存档,作为验收、后期维护的参考资料。
5.5 高效土方平衡计算及优化
施工中土方平衡计算及优化对工程效益产生重大影响。传统测绘方式外业时间长、效率低,特别是大面积工程、道路工程等,不能满足工期需求,影响施工组织、施工优化进展,且测点取样间隔大,不能精准反映实际地形起伏。
无人机倾斜摄影建模计算土方平衡精度可达厘米级,可在建模软件中直接给定基准面范围及标高自动生成挖填方量;或将模型成果导入南方cass等计算软件,完成更精细的土方平衡优化设计,效率高,节省工期,节约人力,其流程如1所示。
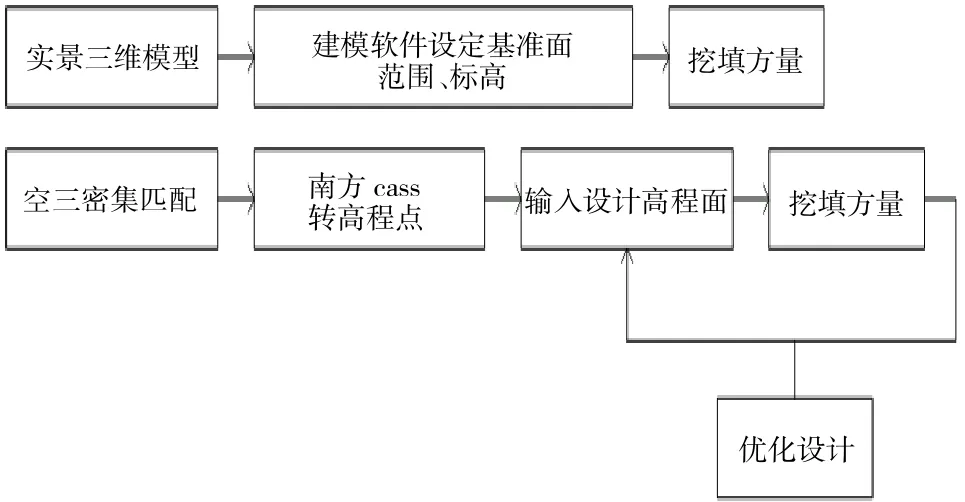
图1 高效土方平衡计算及优化流程
5.6 竣工验收立体测量
竣工测量需要获取建(构)筑物、绿地、道路等的平面位置信息、标高、面积、建筑间距、建筑退界等信息。传统测量方式外业时间长,采用无人机倾斜摄影建模辅助人工测量的方式,可将大量模型可量测信息部分转为内业,同时三维实景模型作为可视化验收资料组成部分,成果直观可靠,有助于提高验收效率。
6 案例应用
某施工工地为制梁场项目,面积约0.6km2,处于丘陵区,地形变化大,村落较多,梁类型多,需进行土方平衡计算指导制梁场设计施工;同时由于工期紧,传统方法耗时长,测绘人员需求量大,因此采用无人机倾斜摄影建模辅助土方平衡计算。
本项目选用碳基测图鹰固定翼无人机,相机焦距20mm,像素2 400万,成图比例1∶1 000。根据制梁场实际位置和布局情况分别布设3个像控点和4个检查点,如图 2所示(2,5,7为控制点,1,3,4,6为检查点)。
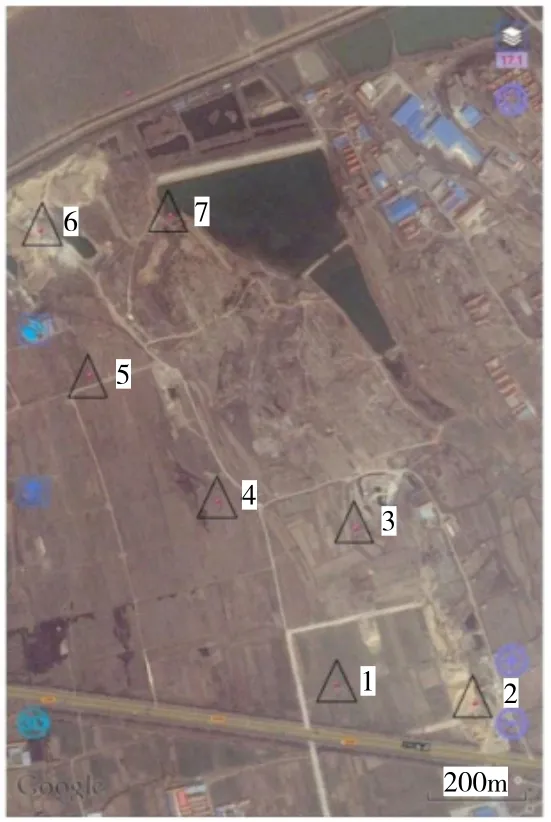
图2 像控点与检查点布置
航摄采取短边飞行方向,根据现场踏勘情况及当日风速风向情况进行航线规划,设计按航向重叠度61%、旁向重叠度68%,地面分辨率3cm,计算得出航高为200m,航速控制在60km/h,以减小像素位移误差。为确保飞机空中姿态的稳定性,减小旋偏角、横滚角的角度,飞行采用与风向平行飞行,飞行一架次,拍摄相片155张,用时25min。
经实景三维建模软件自动计算,控制点与检查点均方根误差如表1所示,满足平差精度需求。
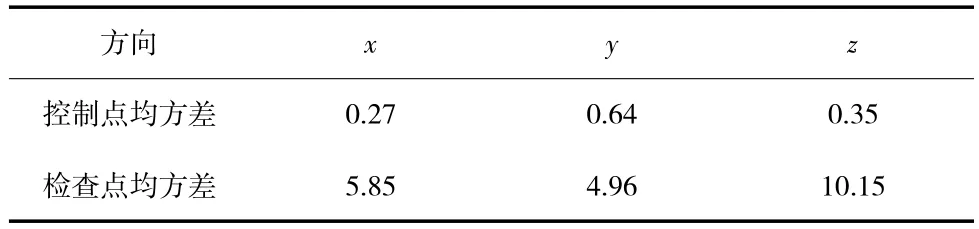
表1 控制点、检查点均方根误差 cm
将实景三维建模软件空三密集匹配的点云数据,导入南方cass软件展成高程点,并以等高距10m生成梁场地区等高线,根据已构建的三角网(目标高程设为28m,方格宽度设为20m),如图3所示,进行土方量计算。根据cass软件计算,得出总填方量60 330.6m3,总挖方量87 446.2m3。
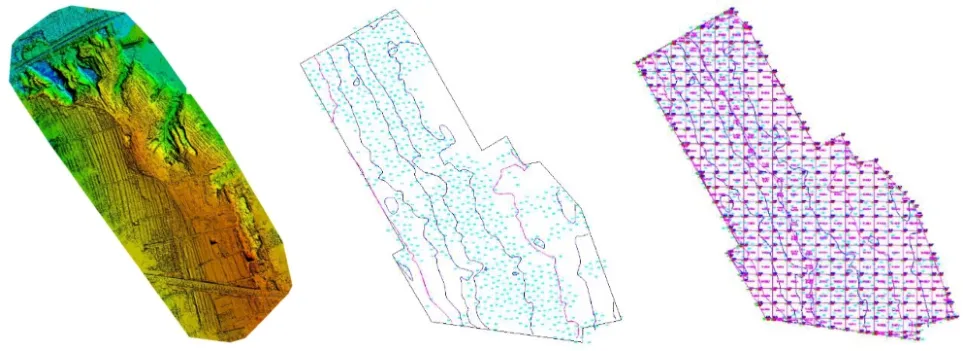
图3 点云、高程、三角网计算
使用cass软件导出地面坐标,将规划图与既有梁场设计图进行匹配,因地制宜布置梁场建设诸元素,如模板、存梁台座数量等,直接设置于数字化地图上以建立BIM模型。场地设置3个高程,大大减少平整场地土方量,取得良好的经济效益。
7 结语
无人机倾斜摄影建模技术应用于施工领域可大大提高生产效率,降低人力成本,提升工作环境质量,并产生良好的经济效益。通过计算选择适用的设备系统和良好的航飞技术,可达到施工中既定的精度需求,是一种值得推广应用的技术。随着人工智能领域的发展跨界,适应施工需求,无人机倾斜摄影建模数字成果的应用方式会逐步向智能化方向发展。同时,随着遥感技术各种传感器的飞速发展,无人机倾斜摄影可扩展到更广的遥感领域,如无人机搭载激光雷达、红外热成像仪、多光谱仪等,在建筑、道路、环保工程施工中有一定应用,将进一步提高应用效果,扩展应用场景。