智能车辆无线传感定位方法
2022-10-11苟丹丹张开生刘振华
苟丹丹,张开生,刘振华
(1.西安汽车职业大学 电子信息工程学院,陕西 西安 710600;2.陕西科技大学 电气与控制工程学院,陕西 西安 710021)
0 引 言
网络信息化时代,依托互联网、大数据、物联网、人工智能等新兴技术,人类生活从传统步入现代,由智慧转向智能。在智能交通领域,多单元组成的群组在区域内未知节点定位方面有着广泛的应用前景,目前随着5G技术以及车联网技术、无人自动驾驶技术等迅速普及和发展,智能无线传感网络在环境监测、医疗设备、智能家居以及安全生产领域得到了具体体现,尤其是汽车产业智能化发展,对城市公共交通系统的智能化管理和调度提出更高要求。
智能定位是城市公共交通系统调度和管理的重要一环,传统定位方式有北斗定位、GPS定位等,但这些定位方式需要额外硬件,成本较高,且难以实现多单元组成的群组协同定位,在实际应用中,GPS定位系统很难在复杂路况及不良天气条件下作出高精度测距,无线传感定位是针对区域内目标节点,采用无线传感器网络进行定位的一种方法,即令无线传感器网络中的目标节点作为未知节点,将已知精确位置点作为参考节点,基于节点位置估测机制,对参考节点与未知节点间的相对距离进行测量,进而间接确定无线传感器网络中未知目标节点自身位置。
目前,在无线传感器网络中,主要有TDOA、TOA、AOA及RSSI(Received Signal Strength Indication)几 种定位方法,但前三种均是基于到达时间差或到达角度的定位,在测距阶段,如果路况复杂,障碍物较多,难以较好地选取信标节点加权权重权值。现有WSN定位算法根据无线网络传感器智能定位过程中是否对实际节点间距离进行测量,主要分为Range-free无测距和Rangebased有测距定位,RSSI测距方法利用无线信号传播损耗与待测距离间的信号衰减模型、待测经验、信号衰减规律以及测距时的理论关系,通过高斯函数滤波、牛顿法迭代和特征匹配、距离加权等节点定位,经过算法改进优化,可将传输损耗转换为无线传感信号发射点距接收节点间的距离,测距误差较小。因此研究与开发一种可靠性高、成本低,能够采用动态参考节点定位的新型智能车辆无线传感定位系统显得非常必要。
1 基于CC2530芯片的物联网系统架构及智能定位模型
1.1 基于CC2530的物联网系统组成
智能车辆无线传感定位系统组成如图1所示。图1中为、两个固定参考节点之间的距离,在参考节点部署时,、值已知,为待定移动节点与固定参考节点之间的距离。图中ZigBee网关节点、网络节点均通过有线与数据管理中心连接;ZigBee有线与无线数据的网络通信以图中“虚线”来表示。据图1可知,定位系统几乎全部采用TI无线网络CC2530芯片进行区域传感定位和车辆跟踪,减少有线传输定位系统布线成本,提高目标定位精度。
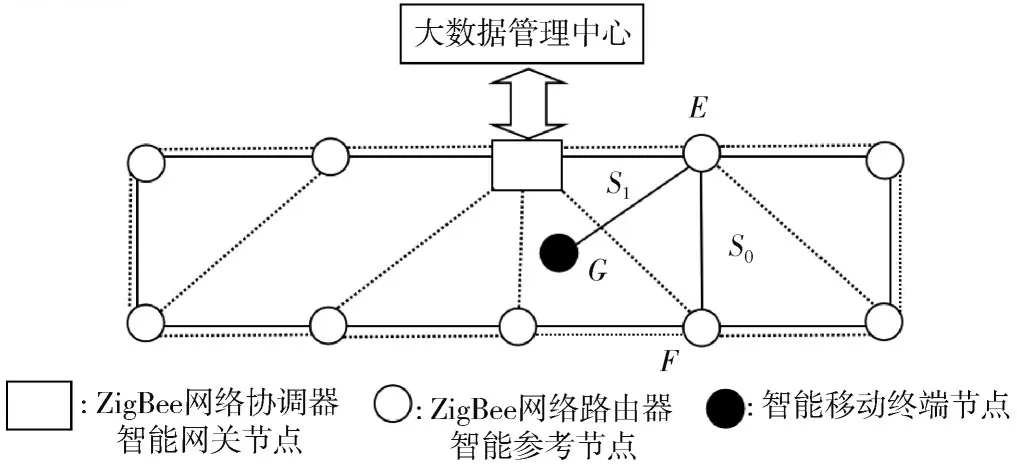
图1 智能车辆物联网无线传感定位系统架构
1.2 基于RSSI的无线传感定位模型
考虑到TI无线网络CC2530芯片固有特点,结合ZigBee传感器节点定位低功耗要求,系统利用ZigBee无线网络传感协议构建网状拓扑网络,基于RSSI接收信号强度进行智能车辆定位。RSSI无线传感定位理论值与距离、发射功率间的函数关系可由式(1)表示:

式中:表示无线网络CC2530芯片信号传播常数;为CC2530内置RSSI接收信号强度指示器信号发射点与接收点间的距离;为发射点距接收点距离等于1 m时来自前端天线增益及传输损耗接收到的信号强度绝对值。根据实测,通常为-46(根据RF输入功率与RSSI寄存器值相对变化关系曲线取平均值)。
图2为典型RF输入功率与接收信号强度RSSI值曲线。
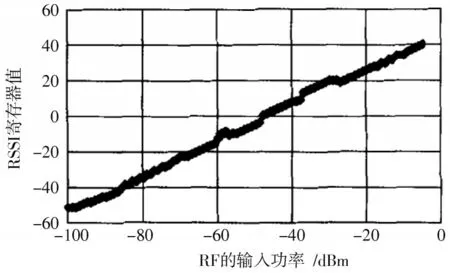
图2 典型RF输入功率与接收信号强度RSSI值曲线
描述的是RSSI信号强度受信号指示器发射点与接收点距离增加产生的影响。为了便于精确定位,带有RSSI定位引擎的CC2530无线网络芯片按表1参数换算关系,将值转换为“_index”后再采用动态参考节点进行定位。
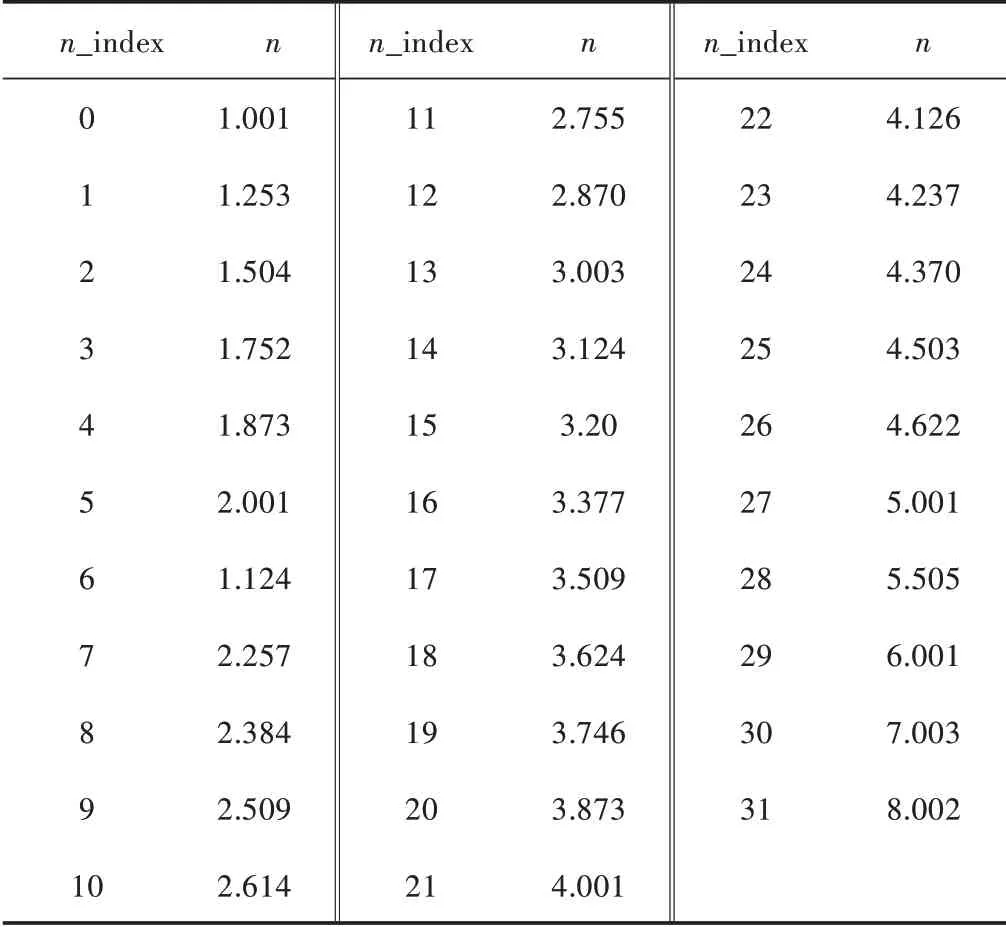
表1 n值参数转换表
将式(1)反解,可得如式(2)动态坐标系中多节点群组接收信号强度RSSI测距式函数:

正常情况下,在RSSI定位过程中,移动节点发出的数据包均能够被每个移动节点周围的参考节点接收,并对应一个RSSI距离值,因此在复杂路况下基于无线传感智能网络进行RSSI定位,必然会涉及到一个最优距离的问题。在无线传感定位时,除了准确测量和选择、等参数外,仍不能忽视移动节点周围参考节点的数量,为保证定位精度,参考节点可在3~8之间取值。
2 ZigBee协议网络下RSSI移动定位算法优化
因网络数据传输时RSSI值易受周围障碍物、多路径、绕射等外界环境因素影响,所以ZigBee协议网络下的RSSI移动定位系统在传输无线信号时可能极不稳定,会增大定位误差,因此需要对RSSI移动定位算法进行校正优化。本文基于RSSI定位中的无线信号传播损耗Shadowing模型,提出了一种预滤波修正权重的序贯质心定位算法。
图3所示为移动节点周围参考节点路径传播损耗。
图3 移动节点周围参考节点路径传播损耗
2.1 无线信号传播损耗Shadowing模型
在基于ZigBee协议网络进行RSSI移动定位中,已知信号发射节点的发射信号强度指示,接收信号强度指示RSSI节点可根据已接收信号强度,对信号在复杂路径下传播时的损耗进行计算,通过经验模型对传输距离损耗进行节点转换,利用已知算法便能较为准确地计算出信号接收节点位置。因此,在实际应用环境中,常会用到ZigBee无线传感网络模拟的Shadowing完整传播模型:

Shadowing模型由两部分组成,一部分是可预测信号强度的pass loss路径损失模型,当以接收信号强度()为参考时,它能准确预测出1 m之内给定距离的距离为时的信号强度()。
式(3)中,衰减指数一般在2~6之间根据场地测量得来的经验取值,当道路中的障碍物较多时,衰减指数就越大,因此随着待测距离的增加,无线传感器网络中接收到的无线信号传播平均能量下降速度会越快。
无线信号传播损耗Shadowing模型的另一部分是一个对数正态随机变量,它反映了定位测量距离恒定条件下无线传感器网络接收到的能量变化,若测量距离以dB为计量单位,Shadowing模型满足高斯分布,它作为一个高斯随机变量,本身无实际意义。但在统计学领域,通过对模型进行拓展,可使之成为富有统计学意义的定位模型。
2.2 基于预滤波修正权重的序贯质心定位算法改进
在传统的质心定位算法模型中,信标节点周期性地向邻近节点广播信标分组,此时信标分组中包含若干个复杂的信标节点位置信息与车辆标识号,由于普通质心算法受无线电传播路径损耗影响,所以节点位置受信标节点的干扰。
理论证明,利用接收信号强度指示RSSI可提高质心定位算法精度,并获得定位信标节点的偏移权值,基于此,本文提出了一种改进后预滤波修正权重的序贯质心定位算法。
加权定位算法中,未知节点与锚节点间的估计坐标可用如下公式求取:
3 ZigBee智能车辆无线传感定位节点硬件
基于序贯质心定位改进算法的ZigBee智能车辆无线传感定位系统各节点硬件框图如图4所示,其中系统的核心为TI公司设计的一款高集成度、低功耗、低成本的CC2530芯片,此芯片可在2.4 GHz ISM频段工作,是基于ZigBee协议SoC解决方案的主控电路。CC2530节点硬件结构与主控电路原理图如图5所示。
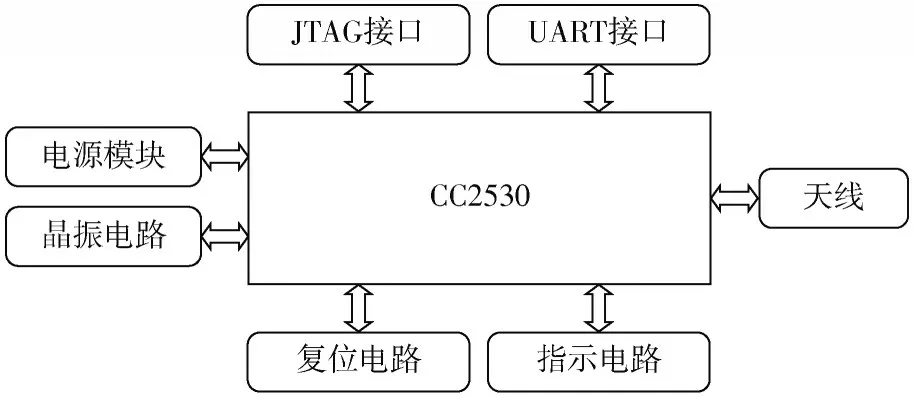
图4 ZigBee智能车辆无线传感定位节点硬件框图
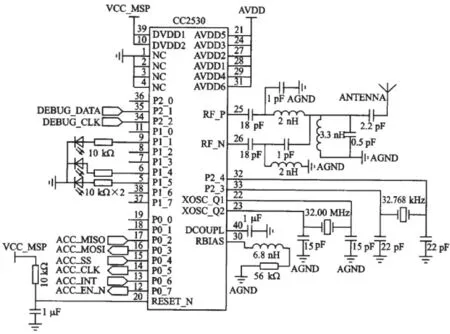
图5 CC2530主控电路原理图
4 软件流程实现方法
4.1 ZigBee定位过程中子网关节点工作流程
1)ZigBee网络协调器智能网关节点上电初始化,组建智能无线传感器网络,等待坐标系中所有的节点加入网络,成功后,协调器上LED指示灯亮起。
2)多单元组成的群组在协同定位时,搜索动态参考节点信号,读取群体中任意两个节点间的坐标值及各移动节点和参考节点间的RSSI距离值。
3)将系统实时读取的锚节点周期性参考节点坐标位置和参考节点与边缘云服务器坐标位置之间的距离发送给周边区域道路中的参考节点和车辆智能调度管理中心。
ZigBee定位过程中子网关节点工作流程如图6所示,流程图中列出的分组信标节点函数为ZigBee RSSI智能定位时所使用的无限传感网络Z-Stack 2007协议栈中的部分主要函数。
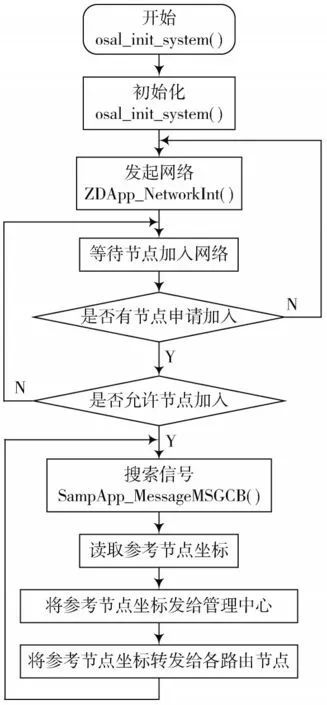
图6 ZigBee定位子网关节点工作流程
4.2 智能参考节点软件工作流程
1)ZigBee网络路由器智能参考节点上电初始化,申请加入无线传感器网络。
2)信号搜索,接收并判断智能传感数据是否发送给参考节点,如果是,则提取数据包中的RSSI测距值,否则丢弃数据包。
3)当某一移动节点的无线智能传感数据接收次数达到10次时,对其均值进行计算。
4)采用改进的RSSI定位算法计算移动节点与本参考节点间的距离均值。
5)将本参考节点与移动节点间的RSSI测距值信息以及自身坐标点信息一同发送给移动节点与ZigBee网络智能网关节点协调器。
ZigBee定位过程中参考节点工作流程如图7所示。
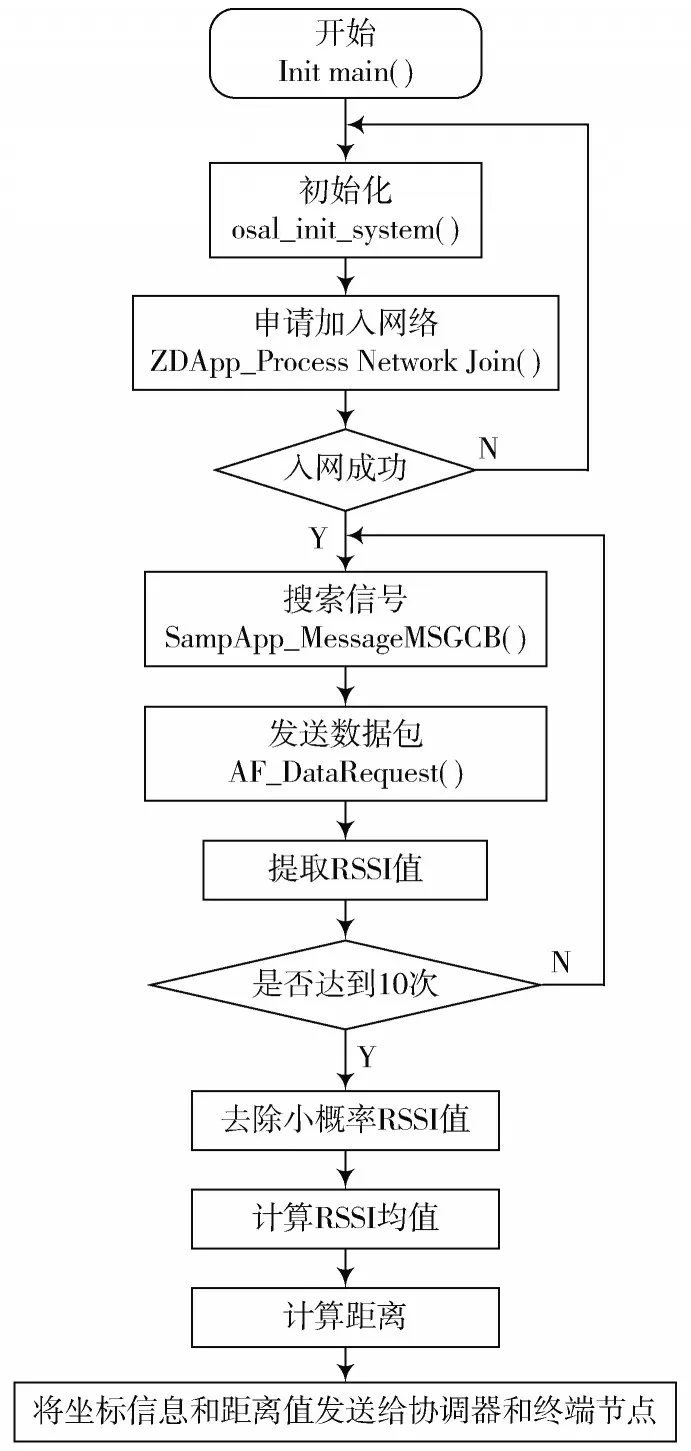
图7 ZigBee定位网络路由器智能参考节点工作流程
4.3 智能移动终端节点软件工作流程
1)智能移动终端节点上电初始化,申请加入无线传感器网络。
2)待其成功入网后,会向道路周围区域不断广播信号数据。
3)判断是否有内部集成的定位引擎数据接收,并从接收到的RSSI测距信息中提取ZigBee网络路由器智能参考节点的坐标信息及参考节点和本移动节点之间的每一个信标节点RSSI值。
4)当智能移动终端节点到达修正权重的加权定位质心某一特定位置后,会将智能车辆转弯、到站等相应语音提示信息开启。
ZigBee定位过程中智能移动终端节点工作流程如图8所示。
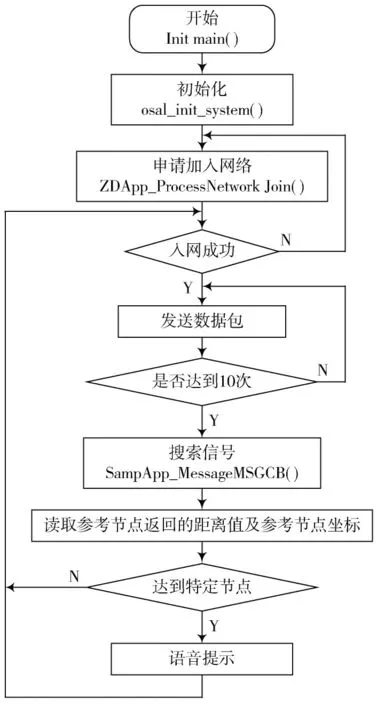
图8 ZigBee定位智能移动终端节点工作流程
5 实验结果
为了验证节点功能,对文中描述的基于CC2530的ZigBee智能车辆无线传感定位节点进行了相应测试,实验在市区内复杂道路且车流较为密集的路况中进行。每间隔120 m,在道路两侧各放置参考节点2个,在无线传感器智能定位时,经由ZigBee网络路由器各智能参考节点对本节点前60 m及后60 m内的动态参考点群组RSSI值进行采集。实验结果如图9所示。
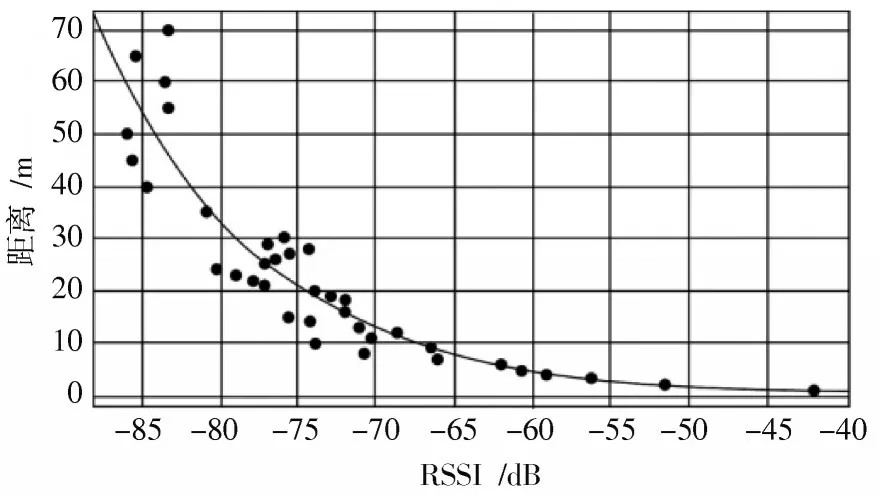
图9 RSSI定位测量与距离关系散点图
本实验分别在雨天、阴天、夜晚和晴天四种不同天气状况下进行,测量结果表明,在晴天环境下行驶,RSSI定位测量误差最小,雨天和夜晚误差最大。在小于30 m的参考节点范围内对四种天气状况下系统定位,RSSI测量误差均小于等于3.5 m;30 m后随着参考节点距离增大,RSSI定位测量误差基本呈线性上升趋势,当智能参考节点距离达60 m时,误差达到峰值,阴天、夜晚、晴天和雨天分别为12.3 m,11 m,9 m,15 m。
6 结 论
在CC2530智能车辆无线传感定位中,利用信号衰减原理提出了一种基于物联网的智能车辆无线传感定位方法,研究并设计了利用ZigBee技术实现多动态参考点下的群组定位系统。在RSSI预滤波算法测距基础上,特别注意了不同距离精度下RSSI定位时的无线信号传播损耗问题,改进和采用了一种基于传统固定参考点模型下的修正权重加权定位质心算法,提高定位测量精度,并利用LabVIEW平台将无线传感定位方法借助网关节点、参考节点和移动节点来实现。经实验验证,RSSI定位测量误差整体较小,在视距可接受范围内。同时,研究也发现RSSI定位节点与测量距离间存在一定线性关系,为进一步提高定位测距精度,仍需大量实验数据拟合ZigBee无线传感网络中的信号衰减规律,通过天线优化,减少方向性对复杂道路环境下车辆定位信号衰减的影响。
