变电站运维检修管控系统设计与开发
2022-10-09赵冀宁张宁祖树涛杨世博刘晓飞
赵冀宁张 宁祖树涛杨世博刘晓飞
(国网河北省电力有限公司超高压分公司,河北 石家庄 050000)
0 引言
近年来,“新基建”得到进一步发展,5G 基建、特高压、大数据中心、工业互联网等领域加快建设步伐[1],大数据、移动互联、人工智能等技术也逐渐应用于电力系统各个环节[2],尤其在电力营销服务[3]、调度运维监控[4]、设备状态在线监测[5]等方面,已经能够做到对大量信息的快速筛选、高效处理和对各类在运设备状态的实时感知。而在电力运维检修作业管控的高效性、实时性、准确性方面与其他专业相比仍存在较大差距[6]。
电力运维检修主要包括设备验收、例行检修、缺陷处理、大修技改等。目前,检修专业的作业质量主要依赖于检修人员现场把控,“应修必修,修必修好”这一检修理念只能通过痕迹化的纸面记录来保证[7]。此外,检修用工器具、仪器仪表及设备所能反映出的检修质量(如可量化的力矩值、试验数据、真空度等关键信息)缺乏实时感知[8];检修质量缺乏远程传输及监控手段,仅记录于纸质文档中,管理人员无法及时了解现场检修情况,导致现阶段的管控效率低,各层级管理缺乏穿透性。
在变电站运维检修管控方面,国内外学者进行了相关研究。文献[9]提出了一种“传统安全+物联网安全”的新型管控模式,建立基于RFID 的可移动电子围栏检测系统、基于运动目标检测的人员行为轨迹监控系统、基于便携式设备的安全监控系统、基于GPS的车辆定位监控系统以及一体化智慧监管云平台,实现了对作业现场全方位、一体化的远程管控;文献[10]利用可穿戴设备无线传感自组网技术,实现了人体与环境的信息反馈以及工作人员的精准定位,提升了电力施工安全性;文献[11]提出了一种变电站施工作业人员安全管控方法,并开发了相应的安全管控系统,提升了变电站人员安全管控的效率和可靠性,增强了变电站施工作业的整体安全性;文献[12]提出了一种基于北斗定位的变电站作业人员行为安全管控系统,利用三维激光扫描技术对变电站进行三维建模,并构建三维数字地图,利用超宽带UWB+北斗的一体化定位技术,实现变电站作业人员室内外高精度定位,最后将智能手环、北斗定位终端与电力工作票结合,实现了对变电站作业人员的实时定位以及行为安全的实时监测,提升了变电站作业现场的安全管控水平。上述方法大都完成对变电站巡检人员行动轨迹及位置信息的管理,未实现对变电站内检修质量及过程的有效管控,无法满足当今新型电力系统背景下输变电数字化转型的趋势[13]。
为解决电力运维检修管控中存在的问题,针对变电站应用需求,结合先进传感技术、系统集成技术、无线通信技术、射频识别技术等,从检测装备、管控系统等方面入手,实现对作业现场检修质量及过程的智能精益化管理。
1 变电站运维检修管控系统总体方案
变电站运维检修管控系统架构如图1所示,本系统主要由智能检修装备、检修现场空间定位系统、检修作业智能终端设备和后台智能检修质量实时管控系统四部分组成,其功能流程如图2所示。

图1 系统总体设计方案

图2 功能流程
智能检修装备为本系统监测检修质量信息的硬件基础,主要包括智能检修扳手、智能刀闸操作手柄和真空度测量装置,具有检修质量信息精准测量与无线数据回传功能。基于超带宽[1415](Ultra Wide Band,UWB)定位技术,通过在检修工况现场搭建定位基站,并将定位标签装配于检修装备及巡检人员,而后通过相关算法,实现实时精准定位,便捷了检修现场智能检修装备及巡检人员的管理。基于带有RFID 功能的10.1 寸Android[16-17]平板,通过开发管控APP 软件,构建了检修作业智能终端设备,可实现检修装备管理、检修质量评估、检修任务派发、作业流程管控等功能。智能检修质量实时管控系统为后端综合管控系统平台,可完成对智能检修装备及检修作业智能终端的设备管理、检修现场空间精准定位与可视化展示、检修作业信息的分析存储、检修任务的归档记录等功能。
2 智能检修装备开发
2.1 方案概述
基于电力运维检修应用需求,开发智能检修扳手、智能检修刀闸操作手柄和真空度测量装置。结合现代先进传感技术、物联网技术、UWB 空间定位技术、射频识别技术等技术支持,最终实现检修质量信息的精准测量与无线数据回传、检修装备的分米级空间定位、检修装备信息的识别获取及设备管理等功能。
2.2 智能检修扳手
在传统检修扳手基础上内嵌入高精度扭矩传感器,当检修作业施加扭矩时,可将施加扭矩转变为电信号,实现扭力扭矩的精准测量;引入NBIo T[18-19]技术,采用WH-NB73-BA 型号NBIo T模块,将所测扭矩信息数据加密处理,并按照既定通信协议通过数据透传方式发送至Io T 平台,后台智能检修质量实时管控系统可从Io T 平台二次开发接口获取数据并进行解析校验,从而实现扭力扭矩信息的高效无线数据回传。此外,在检修扳手上加装空间定位标签与超高频抗金属电子标签,实现了智能检修扳手在检修工况现场的精准定位与设备管理。智能检修扳手拥有扭力设定、单位设定、数值储存、数值清除、数值输出、用户校正、声光报警以及无线数据传输等功能,如图3所示。

图3 智能检修扳手
智能检修扳手属性如表1所示。

表1 智能检修扳手属性
2.3 智能检修刀闸操作手柄
在传统刀闸操作手柄机械结构基础上串接入双法兰静态扭矩传感器,将其与外置JN-BSQDG 数字模拟变送器连接,并输出4~20 m A、1~5 V 标准电流电压信号,完成扭矩信号至电信号的转变,实现刀闸操作手柄静态扭矩的精准测量。
与上述智能检修扳手同理,引入NBIo T 技术,并加装空间定位标签与超高频抗金属电子标签,以实现检修扭矩信息的高效无线数据回传、设备空间定位以及设备管理等功能,其实物结构如图4所示。

图4 智能检修刀闸操作手柄
智能检修刀闸操作手柄属性如表2所示。
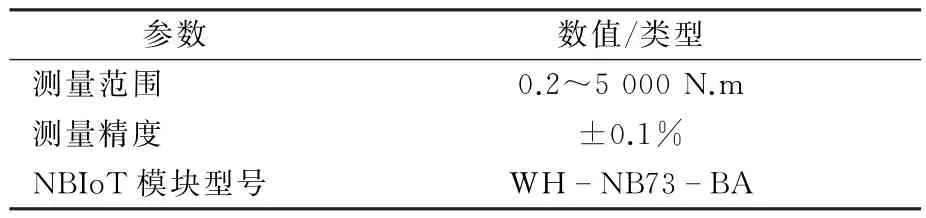
表2 智能检修刀闸操作手柄属性
2.4 真空度测量装置
真空度测量装置的核心部件为Pirani电阻真空计[20]PRV101,其具有准确度高、灵敏度高、抗电磁干扰等优点,可实现变电站内油浸式变压器油箱真空度的精准测量。
与上述两装备同理,加装NBIo T 模块、空间定位标签与超高频抗金属电子标签等,以实现真空度数据信息的实时无线数据回传、真空度测量装置精准定位以及设备管理等功能,其属性参数如表3所示,图5为真空度测量装置实物结构。

图5 真空度测量装置

表3 真空度测量装置属性
3 检修现场空间定位系统开发
3.1 方案概述
基于超带宽定位技术,开发检修现场空间定位系统。UWB技术具有系统简单化、对信道衰落不敏感、低截获能力、高定位精度等优点,可满足电力检修现场工况的应用需求。
本系统采用“4基站+N 标签”定位模式,在检修现场作业区域内搭建定位基站,其中A0、A1和A2基站高于地表1 m,A3基站高于地表1.5 m,并将定位标签装配于检修装备及巡检人员,基站A0可将定位系统中所有的测距以及时间信息进行数据加密处理,并按照既定通信协议通过数据透传方式发送至Io T 平台,后台智能检修质量实时管控系统可从Io T 平台二次开发接口获取数据并进行解析校验,而后通过飞行时间测距ToF(Time of Flight)以及基于信号到达时间差TDOA(Time Different of Arrival)算法解算出定位区域内所有定位标签的位置信息[2122],最终实现检修现场智能检修装备及巡检人员的实时精准定位与可视化展示,系统示意如图6所示。

图6 检修现场空间定位系统示意
3.2 检修现场空间定位原理
UWB技术的测距原理为飞行时间测距法。ToF 为双向测距技术,其通过测量信号往返2个异步收发机的飞行时间从而计算得出节点间的距离。本系统采用基于信号到达时间差(TDOA)定位算法,根据信号到达待测目标节点与定位基站的时间差来进行定位;与其他定位算法相比,TDOA 定位算法精度较高,配置较为灵活,应用较为广泛。
3.3 检修现场空间定位系统设计
在检修现场空间定位系统中,核心组件为采用“底板+模块”架构的UWB 定位模块,其相关参数如表4所示。其既可以作为基站,也可以作为标签,可通过USB指令进行设置。

表4 UWB定位模块主要参数
4 检修作业现场智能终端设备开发
4.1 方案概述
检修作业现场智能终端设备在CENAVA A11T3型号三防安卓平板的硬件支撑基础上开发APP软件,并结合物联网技术、无线通信技术以及射频识别技术,实现与智能检修装备以及后台智能检修质量管控端的多端通信互联,为检修作业现场实现智能检修装备管理、检修质量评估、检修任务派发、作业流程管控等功能奠定了基础,研制方案如图7所示。
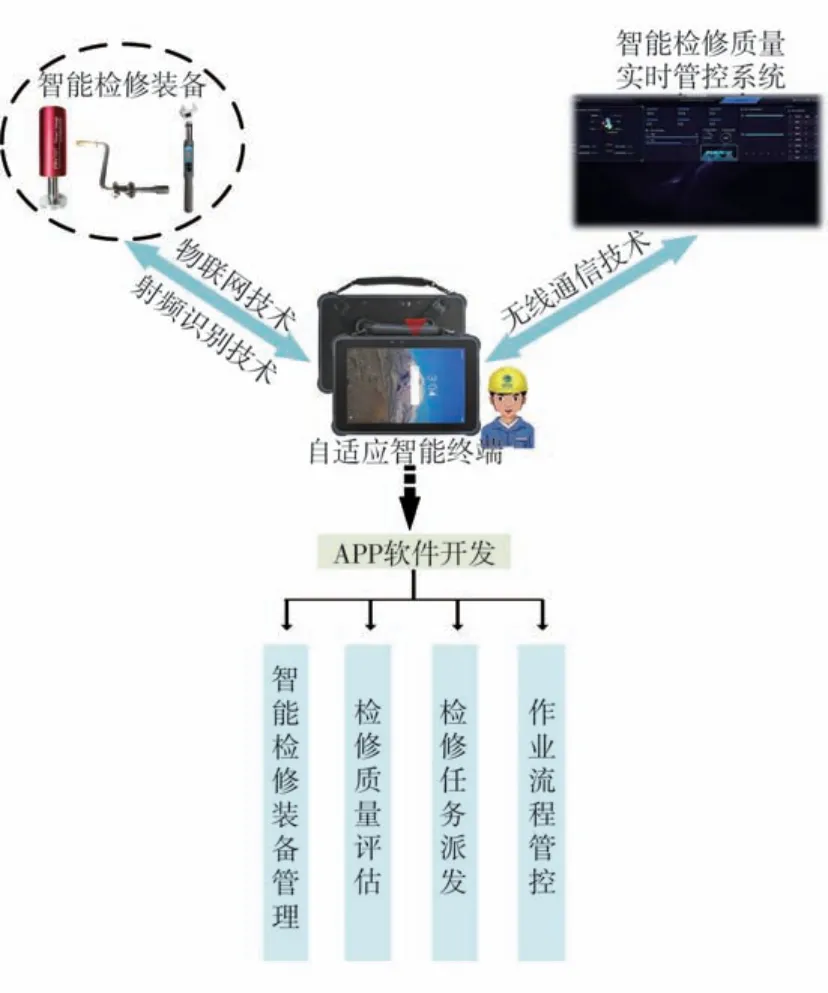
图7 智能终端设备研制方案
4.2 智能终端设备属性
智能终端设备基本属性如表5所示。

表5 智能终端设备基本属性
4.3 智能终端设备APP软件开发
4.3.1 智能终端检修管控APP软件开发
基于智能终端设备作为硬件支撑,开发智能终端检修管控APP 软件。开发中严格遵循实用性、安全性、先进性、稳定性以及可靠性等原则。
本软件针对Android系统环境进行开发,综合应用Uni-App安卓开发技术、JSON 数据交换技术、C/S技术、Axios技术、MariaDB数据管理技术、Nodejs-Koa网络框架等,最终实现了智能终端检修管控APP软件的开发与功能应用。
4.3.2 智能终端检修管控APP软件功能实现
智能终端检修管控APP软件可实现对智能检修扳手、智能刀闸操作手柄以及真空度测量装置等智能检修装备的设备管理;可将检修作业质量信息进行可视化展示与质量评估;还可实现检修任务的设定与派发以及作业流程的管控等功能。
5 智能检修质量实时管控系统开发
基于云服务器,开发智能检修质量实时管控系统,其性能参数如表6 所示。本系统平台在Ubuntu操作系统下进行开发,综合运用HTTP和WebSocket网络通信技术、MariaDB 数据管理技术、Nginx Web 服务器、Vue2+Echarts技术,最终实现了对智能检修装备及智能终端的设备管理、检修现场空间精准定位与可视化展示、检修作业信息的分析存储、检修任务的归档记录等功能。

表6 服务器参数
6 结束语
基于电力运维检修管控现状和应用需求开发了变电站运维检修管控系统。本系统通过在变电站工况现场“硬件装置+软件系统”的整合应用,实现了检修质量信息的实时反馈、结果可视化以及作业流程的有效管控,提高了变电站检修管控的效率与智能化水平。本系统与以往的管控系统相比有一定的优势,可满足检修现场作业应用需求,可实现对作业现场检修质量及过程的远程化、数字化、穿透式管理,有一定的推广应用价值。在后续的研究工作中,可尝试增强监测检修质量信息的多样性,并改善与上级运维系统之间的数据共享与融合应用。
