智能化高效活性炭测氡仪开发与试验应用
2022-10-09乔宝强薛耀辉王勇王东升
乔宝强,薛耀辉,王勇,王东升
(1.核工业北京地质研究院 中核集团铀资源勘查与评价技术重点实验室,北京 100029;2.中国国际工程咨询有限公司,北京 100048)
目前的土壤氡测量方法按测量时间长短来分可分为累积测量和瞬时测量[1]。瞬时法一般是用泵抽取土壤中的气体,然后直接测量其中的氡,或者采用能谱的方法测量氡的第一代衰变子体218Po(RaA)来间接得到氡浓度。累积法一般是无源式,是被动等待氡气扩散到采样器中并积累一段时间后,用探测器进行分析测量,所得结果是一段较长时间内的平均氡浓度[2]。
活性炭测氡作为一种累积式土壤氡气测量方法,能够有效降低天气、短测量时间等随机因素的影响,获取较为可靠的土壤氡浓度数据,已在铀资源勘查领域发挥了重要作用[3-7]。目前,商用的活性炭测氡仪在测量过程中,需要人工逐个对活性炭样品进行测量,手动取放样品,输入样品的埋置、取出时间[8-10]。在样品数量较大时,手动输入样品号、埋入时间、取出时间等信息易出错,人工耗时较长,工作效率相对偏低[11]。因此,有必要研制智能化高效活性炭测氡仪,有效提升活性炭测氡的智能化程度和样品测量效率,为铀矿勘查中土壤氡气累积式测量提供设备和技术支撑。
1 测氡仪整体构架
1.1 系统组成
智能化高效活性炭测氡仪的功能组成框图见图1,主要包括:控制模块、样品取放模块、样品信息识别模块、样品放射性测量模块、供电模块和通讯模块。控制模块用于控制整个系统运行,负责样品埋置时间录入,控制样品取、放、识别、测量及存储等全过程,通过计算给出最终氡浓度数据;样品取放模块用于实现从样品箱中取出样品、放置样品到测量铅室内、取出样品并放置回原位等一系列动作,代替以往人工操作;样品信息识别模块用于智能化识别样品瓶底部的4 位编号信息,对接该样品野外测点坐标信息和氡浓度信息;样品放射性测量模块用于对样品进行伽马总量测量[12];供电模块负责提供测氡仪系统工作电源和电机驱动电源;通讯模块负责整个测氡仪内各个模块之间的数据通讯。其中,样品取放模块、信息识别模块和放射性测量模块具有一定的创新性,是本文重点阐述的内容。
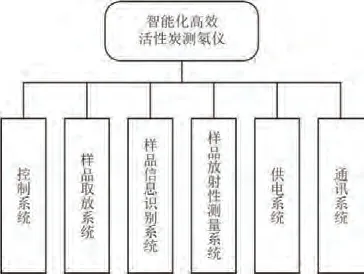
图1 智能化高效活性炭测氡仪系统组成框图Fig.1 System composition block diagram of intelligent high-efficiency activated carbon radon detector
1.2 整机结构
在结构上,测氡仪包括:上位机软件、控制器、采集器、机械臂、深度相机、柔性夹爪、编码识别、铅室、样品箱以及工作台等10 个部分,测氡仪系统实物照片如图2 所示。其中控制器、采集器、机械臂及夹爪驱动位于工作台下部的柜子中。机械臂、两台铅室、样品箱固定于工作台的四个顶角,编码识别相机位于两台铅室中间;机械臂、柔性夹爪与深度相机为一体,深度相机位于机械臂顶端,为提高测量效率,采用两个柔性夹爪,固定于机械臂两侧;样品箱采用5×10 矩阵方式存放样品,样品瓶底部朝下放置。

图2 智能化高效活性炭测氡仪Fig.2 Photo of the intelligent high-efficiency activated carbon radon detector
2 样品取放、信息识别及放射性测量模块
2.1 样品取放模块
基于电动机械臂、柔性夹爪和深度相机,综合构建了智能化样品取放模块。该模块能够自动识别样品数量及坐标,可自动“抓取-放置-取回”活性炭样品。
1)样品取放方案
在工作台上固定机械臂、测量铅室、编码识别相机和样品箱位置的基础上,样品取放采用“深度相机识别样品→电动机械臂移动到位→柔性夹爪夹放样品”的方案(图3)。样品取放具体过程:取放模块上电初始化后,机械臂顶端的深度相机处于样品箱上方固定位置,自动识别出样品瓶的位置和数量,之后将坐标发送给机械臂并启动机器臂移动到样品上方,之后启动柔性夹爪以“张开-合夹”动作夹住样品瓶,之后在机械臂的移动下,将样品瓶移动至编码识别相机的顶部,之后在编码识别相机识别样品编号后,铅盖在采集器控制下自动打开,机械臂放置样品瓶到铅室内,铅室自动关闭铅盖,开始伽马测量;机械臂移动至下一个样品瓶上方,如上个过程一样,将第二个样品瓶放入第二个测量铅室内进行测量;机械臂等待样品测量完成,在第一个样品测量完毕后,铅室自动打开铅盖,机械臂抓取下一个待测样品,然后利用另一个柔性夹爪将测量完成的样品瓶取出(机械臂顶端配接2 个柔性夹爪),再将待测样品瓶置入铅室内,铅盖关闭,测量再次开始;以下过程相同,循环往复,直到将整箱50 个样品测量完毕后通知上位机发出警报通知工作人员更换样品箱。

图3 活性炭样品取放方案流程图Fig.3 Photos showing the sample taking and placing by activated carbon detector
2)样品取放部件
样品取放部件由机械臂和柔性夹爪组件构成,机械臂负责移动到指定位置,柔性夹爪负责夹取或释放活性炭样品。机械臂采用E5 型6 轴协作机器人,采用电机驱动方式,由机械臂本体、控制Pad 和电控箱组成(图4a)。机械臂的移动采用其配套的控制软件HansRobot,该软件采用人机交互的方式可实现对机械臂的二次程序开发,通过调用模块化指令编写程序树方式来设定运动路径,使机械手完成预期的动作,同时还可以对机械臂进行参数配置和坐标校准。
柔性夹爪采用SFG 系列柔性夹爪,夹爪由特殊的硅橡胶材料浇筑成型,具有柔韧性好、寿命长、可靠性高等特点。为稳定夹取圆柱状样品瓶并保持水平,采用具有3个柔性手指的SFG-FCA3型夹爪(图4b)。柔性夹持模块主要由末端执行器、气动控制器及附件气路组成,通过连接气源及机械臂,搭建柔性夹持模块。SFG 柔性夹爪利用充放气功能实现抓放功能。机械臂的控制箱通过IO 端口向柔性夹爪的控制器发送指令,控制柔性夹爪的张开与闭合,从而实现柔性夹爪与机械臂协同工作,实现样品的定位和取放功能。

图4 样品取放装置Fig.4 Sample taking and placing instruments
3)样品视觉识别
样品视觉识别是为了获取样品的位置和数量信息,为后续样品的取放提供基础信息。视觉识别是通过深度相机获取样品照片,基于样品瓶(白色)与样品箱(蓝色)的差异,通过软件抓取特征点(样品瓶白瓶盖),在已固定坐标原点(机械臂固定原点)的条件下,对样品照片进行变形修正,进而得到样品瓶中心点的位置和样品数量信息。深度相机采用Intel RealSense Depth Camera D435 型。视觉组件对样品的识别是通过深度相机在样品箱上方固定位置拍照后,采用图5 的技术流程,识别出样品瓶(图6),依据设定的机械臂坐标模块,计算出各样品的中心坐标值。样品的坐标包括在样品箱中的行列式矩阵坐标和浮点坐标,行列式坐标便于工作人员查找,浮点坐标为机械臂使用的定位坐标。
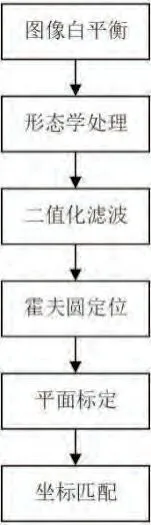
图5 活性炭样品瓶识别技术流程Fig.5 Technical process of sample bottle identification by activated carbon detector

图6 视觉组件识别定位活性炭样品瓶Fig.6 Visual module recognition and positioning of activated carbon sample bottle
2.2 样品编码识别模块
基于工业相机和上位机字符识别软件,构建了智能化样品信息识别模块。该模块能够在室内常规LED 灯管的光源条件下,高效识别活性炭样品瓶底部的数字喷码。
1)样品信息识别方案
样品信息识别采用“样品瓶底部喷码→工业相机拍照→上位机软件识别”的方案(图7),具体过程:将白色样品瓶的底部喷涂黑色数据编码,之后采用工业相机对样品瓶底部进行拍照,然后将图片上传至上位机,进而采用文字识别软件识别图片中的数字编码,最后将编码传输给上位机软件。
2)样品编码
样品编码是为了将测量获取的氡浓度数据与该样品的线点号进行对接,在野外埋置活性炭样品瓶时,记录该测点使用的样品瓶的编号。样品编号为4 位数字(0001~9999),样品编号前加方向和起始位定位符号“▲”,样品编号喷写在样品瓶底部,样品编号喷涂颜色为黑色。
3)图像信息采集与数字识别
图像信息采用高速工业相机对瓶底拍照的方式获取(图7 中间图)。图像数字识别是将工业相机采集的照片上的数字编码识别出来。基于海康威视VisionMaster 视觉软件平台,进行二次软件开发,通过调用不同的功能函数和修改参数,实现编码位数、字符特征的识别,建立可靠的图像数字识别流程(图8)。工业相机接收到控制器的开始识别指令后,识别图像源,通过快速特征匹配判断“▲”符号,从而修正4 位编码的方向和确定起始字符。在通过人工智能方法训练完成的字符库中查找对应的字符,达到识别出4 位编号的目的。字符库包括0~9 数字和大小写英文字母。如果识别结果是4 位数字字符,表明识别成功,向控制器发送数据,如果不满足4 位数字要求,则向控制器发送识别错误指令。

图7 活性炭样品信息识别方案流程图Fig.7 Scheme of Sample information identification by activated carbon detector

图8 图像数字识别流程Fig.8 Flow chart of digital recognition process
2.3 样品放射性测量模块
测氡仪系统高效测量模块包括控制器、采集器、伽马探测器及铅室。
1)控制器
控制器是高效测量模块的核心,控制器组件结构如图9 所示。控制器控制着整套系统的工作流程,硬件部分包括网络接口、USB 接口、RS485 总线接口、系统工作电源和电机驱动电源等,主控芯片为STM32F429。网络接口连接控制器与机械臂,基于uCos-III 嵌入式操作系统下LwIP(Light Weight IP)开发,LwIP 中的线程由uCos-III 中的任务创建,通过调用LwIP 任务,实现网络接口的初始化和数据通信。USB接口连接控制器和上位机,实现控制器的指令接收和数据上传。USB 接口基于CH376S 芯片的设备模式,采用SPI 接口与STM32F429 连接,该芯片内置USB 控制传输的协议处理器,简化了控制传输。控制器通过RS485 总线连接两台采集器、深度相机和编码识别相机。转换芯片采用SP485,将主控芯片的串口数据转换为两条差分信号输出,在两条差分信号线上可增加或减小节点(采集器)个数,最大32 个。因此,本系统具有扩展功能,也就是在当前RS485 总线上以机械臂为中心还可以再增加采集器,从而提高测量效率。系统工作电源采用AC-DC模块,将220VAC 转换为±12V 和5V 低压直流电源,作为整套系统的工作电压。电机驱动电源采用降压型变压器,再通过整流桥电路,输出驱动电机的36V,12W 直流电源。

图9 控制器结构示意图Fig.9 Schematic diagram of controller structure
2)采集器
采集器的内部结构如图10 所示。采集器控制器内核为STM32F429 芯片,,主要功能为采集伽马脉冲信号和控制铅室舱门的开合。

图10 采集器内部结构图Fig.10 Internal structure diagram of the collector
伽马脉冲信号的采集由模拟放大、滤波电路、阈值设置电路、比较器电路和脉冲计数电路组成。当采集器收到控制器的采集指令后,启动控制内核的计数器外部中断函数记录伽马脉冲数量,默认采集3 次,每次采集时间50 s。以往活性炭测氡仪测量时间为每次60 s。同时采用两台采集器,可将原来的样品测量效率由15 个/h 提高到36 个/h。而且采集次数和每次采集时间由上位机软件设置。对于低含量的样品,可通过增加每次采集时间降低统计误差,记录后的脉冲数通过RS485 总线传输至控制器。采集器的另一个重要功能是控制铅室上无刷直流电机的顺时针或逆时针旋转,达到控制舱门开合的目的。在采集器内部集成了电机驱动芯片A4950S,该芯片的逻辑输入端口由STM32F429 的两个IO 口控制,电机的转换通过IO 口的PWM 信号的占空比控制。输出端直接连接无刷直流电机的正负极,两个IO 口输出电平不同,A4950S 芯片输出电压极性不同,从而控制电机的顺时针和逆时针旋转。
3)伽马探测器及铅室
为提升对活性炭样品释放的伽马射线的探测效率,相比于以往的NaI 晶体,本文采用高探测效率的BGO 晶体与光电倍增管组成伽马探测器[13]。BGO 晶体密度(7.19 g/cm3)大于NaI 晶体密度(3.67 g/cm3),所用晶体尺寸(φ30 mm×40 mm)大于原有NaI晶体尺寸(φ30 mm×25 mm),因此探测效率更高。
铅室主要用于屏蔽环境中伽马射线以降低外界环境对样品测量的影响[14]。铅室采用中空圆柱体结构,顶部有铅盖,在样品测量过程中,铅盖必须保持关闭状态。样品瓶和探测器置于圆柱体内,铅室底部安装底座,伽马探测器连接线从底座引出。探测器处于铅室的底部,样品瓶处于铅室的上部,样品瓶的底部与探测器的顶部接触。铅室的主体结构如图11。

图11 铅室3D 示意图及内部结构图Fig.11 3D schematic diagram and internal structure of lead chamber
铅室设计的核心是实现铅盖的自动开合。本文采用小体积无刷直流电机和传动轴构建铅盖控制模块。无刷直流电机在PWM 脉冲信号的控制下转动,同时带动连接杆上的垂向齿轮转动,垂向齿轮再带动横向齿轮转动,从而带动铅室舱门的自动打开与关闭。相比传统的测氡仪铅室,无需手动开合铅盖操作。
3 系统测试及试验应用
3.1 系统技术指标测试
经核工业放射性勘查计量站检定,获取了氡气测量系统活性炭测氡仪的仪器检定合格证书。参照《活性炭吸附测氡仪(EJ/T824-2014)》[15],对测氡仪系统的氡气探测灵敏度、伽马测量模块短期稳定性等关键技术指标进行了测试。此外,对样品取放运行成功率、样品信息识别准确率、样品测量效率进行了测试。上述具体指标参见表1。
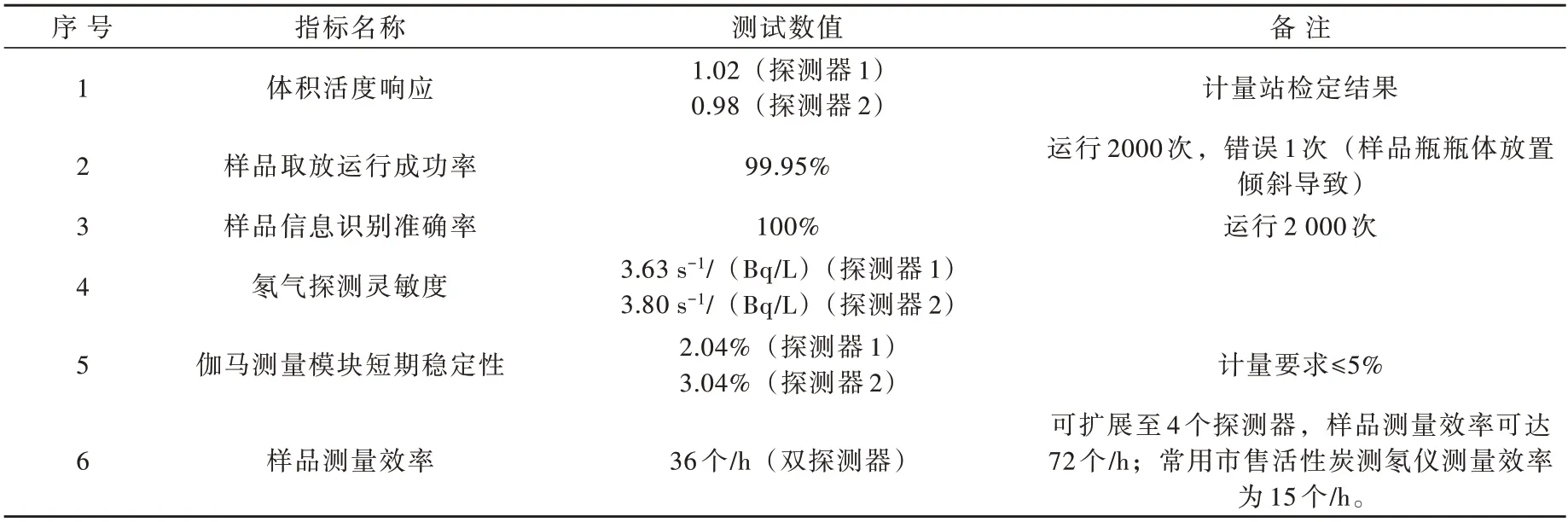
表1 智能化活性炭测氡仪技术指标表Table 1 Technical specifications of intelligent activated carbon radon detector
3.2 测氡仪试验应用
在安徽省芜湖市无为县内开展了活性炭测氡试验工作。试验区内以1:5000 比例尺(测网50 m×10 m)点距开展采样工作,测线方向NE45°,采样面积为0.49 km2,总计采集到1 032个样品。采用智能化活性炭测氡仪对样品进行了测量,获取了试验区土壤氡浓度分布特征(图12)。试验测试期间,测氡仪运行正常,验证了仪器的可靠性。
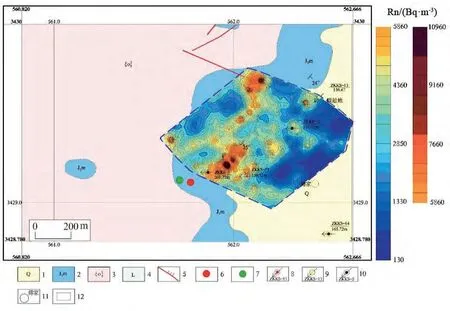
图12 无为县试验区土壤氡浓度等值图Fig.12 Contour map of soil radon concentration in experimental area of Wuwei County
对1 032 个样品,分6 天收集完成,平均每天收集172 个样品,对每天收集的样品测量时间约为4.8 h,1 032 个样品合计测量时间约为29 h。

表2 野外样品测量成功率统计Table 2 Statistics of the success rate of field sample measurement
4 结论
1)通过开发活性炭样品智能化取放模块、样品信息识别模块和高效伽马测量模块,综合构建了智能化高效活性炭测氡仪,并在核工业放射性勘查计量站获取了测氡仪检定合格证书,具备了智能化高效测量功能。
2)研制的智能化活性炭测氡仪,探测器具有可扩展功能,可在现有2 个探测器基础上扩展至4 个,样品测量效率提高至60~70 个/h,为铀矿勘查大规模活性炭测氡工作提供了测量设备支撑。
3)通过开发基于BGO 晶体的伽马总量测量系统,有效提升了对伽马射线的探测灵敏度。
致谢:感谢核工业北京地质研究院王玮高级工程师、梁树红高级工程师和东前高级工程师在测氡仪研发过程中提供的宝贵建议和大力帮助;感谢核工业航测遥感中心唐晓川高级工程师和杜晓立高级工程师在测氡仪标定工作中给予的指导和帮助!