仿真假体视觉下的运动感知研究
2022-10-09姜广淼赵瑛王铁何洋景佳琪
姜广淼,赵瑛,王铁,何洋,景佳琪
内蒙古科技大学信息工程学院,内蒙古包头 014010
前言
视觉是外界事物通过光信号作用于眼睛,经眼内屈光介质传达到眼内视网膜的感光细胞产生兴奋,并将光刺激产生的视觉信号转化为神经电信号,再将这些神经电信号经过视神经通路传递到大脑从而对事物的大小、形状、速度等信息产生感知。人类活动中对于外部信息的获取大约80%来自视觉,通过视觉获取图像信息是人们生活和工作中必不可少的功能。据统计,全球超过7 亿人存在视力问题,其中2.1亿人有中度和重度视力障碍[1]。导致视力受损乃至失明的主要原因是白内障、青光眼以及视网膜类疾病,包括遗传性和后天性疾病,随着科技的发展,白内障和青光眼可以通过药物和手术治疗解决,而视网膜永久性病变造成的失明,如视网膜色素变性和黄斑变性还没有有效的治疗方案,研究人员借鉴人工耳蜗的研究思路,开发出一种能够帮助视觉受损的人提供视觉感知的植入式医用电子设备,即视觉假体。它是利用视力受损甚至失明者残存的部分结构和功能完整的视觉通路,通过人工进行电刺激诱发“光幻视”使盲人产生部分视觉感受[2-3]。由于视觉假体的临床局限性,无法大规模招募被试者进行假体植入,因此进行仿真假体视觉的研究具有重要意义。目前,国内外多个研究小组进行了不同的仿真假体视觉下的不同任务研究。吴昊[4]对仿真假体视觉下的不规则光幻视的眼手协调任务进行研究;Xia 等[5]研究了仿真假体视觉下的多目标的识别任务;赵瑛等[6]进行仿真假体视觉下的寻路任务研究;Luo 等[7]研究仿真假体视觉下对于物体的定位任务;西班牙的萨拉戈萨大学工程研究所则利用虚拟现实技术探究仿真假体视觉下被试者对于虚拟房间场景内的家具等常见物体的识别情况等[8]。在仿真假体视觉下,对于物体的识别以及空间位置的感知尤为重要,而在日常生活中,我们所看到的世界是运动的世界,所观察到的物体是运动的物体,因此,对于仿真假体视觉下人们对于运动物体的速度感知研究也具有重要的指导意义。
速度感知是人在空间中行走和移动的一种重要能力,这种能力能够保证人们感知速度大小,从而进行安全活动。在现实生活中,人们经常需要利用接收到的视觉信息判断运动物体到达某个特定点的所需时间,即对碰撞时间(Time to collision or Time to Contact,TTC)的估计。近年来,许多学者对速度感知进行研究,刘瑞光等[9]考察运动距离和运动速度等因素对TTC 估计的影响;李才文等[10]研究了对威胁刺激的碰撞时间估计;郭秀艳等[11]和Kiefer等[12]发现移动速度对时间估计的准确性影响显著;Snowden等[13]以及Alfred 等[14]先后做了有关对比度对人的速度感知影响的研究;黄端等[15]证明了对于TTC 的估计受物体类别的影响;Lohman[16]的实验研究了性别差异对于速度感知的影响;Coeugnet 等[17]发现被试者的心理压力状况可影响其对物体的速度感知等。目前,关于仿真假体视觉下的速度感知研究并未取得较为有效的成果,通过仿真假体视觉下的速度感知研究,来分析影响假体视觉下对碰撞时间估计的因素。
本研究通过在仿真假体视觉下的虚拟场景中设计运动目标,运用遮挡范式分析目标(Object)运动方向、运动速度、目标运动方式、目标形状以及环境对比度对假体视觉下TTC 估计的影响,可以确定假体视觉下不同条件对速度感知的影响,并为假体佩戴者在未来的训练和生活中提供一些理论依据。
1 资料与方法
1.1 被试者资料
参与本研究的被试者共20 名(男女各10 名),平均年龄24 岁,所有被试者视力或矫正视力正常。在进行本研究之前均已了解试验目的和试验流程,并承诺认真完成试验。所有试验过程满足赫尔辛基宣言以人作为受试对象的生物医学研究的伦理原则和限制条件。
1.2 试验所需设备
试验设备硬件包括1 台27 英寸华硕显示器(VG279QM,最高刷新率为280 Hz),1 台Dell P2412H 显示器,1 台Dell 台式电脑(DESKTOP-65JS5H7),EK925达尔优机械键盘,雷蛇2000鼠标。
试验软件使用Unity3D 搭建仿真假体视觉下的试验场景,使用ErgoLAB3.0,SPSS 22.0,Origin 2018分别用来记录、分析试验结果、绘制统计图形;试验编程语言使用C#编写场景组件的脚本文件,使用ShaderLab编写Unity Shader。
1.3 试验方法
本研究采用遮挡范式来测试被试者对TTC 的估计时间。首先在Unity3D 中搭建了正常视觉下的场景(Scene),如图1 所示,左边较大的正方体(Cube)为遮挡部分(Shelter),右边较小的正方体为被试者所观察的移动目标物体(Object),二者颜色值相同。
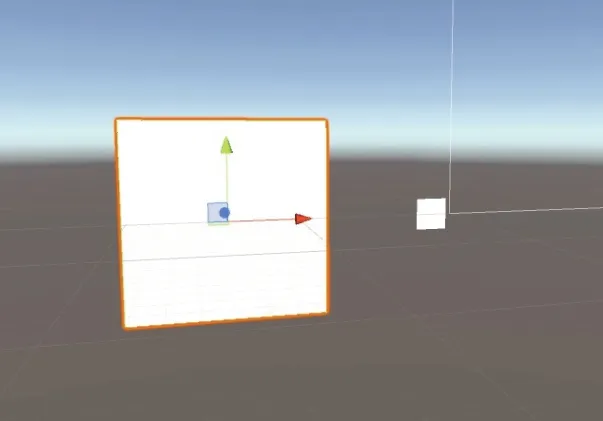
图1 Unity3D中建立场景示意图Figure 1 Virtual simulation scene built in Unity3D
在Unity3D 场景的三维世界坐标是建立在笛卡尔坐标的基础之上的,其中,Unity3D 默认的坐标系为左手坐标系,水平方向为X 轴方向,右方向为X 坐标正方向;垂直方向为Y 轴方向,上方向为Y 轴正方向;垂直于X、Y 轴的方向为Z 轴方向,屏幕向里方向为Z轴正方向。Shelter的规格大小为(120,120,1e-07),表示其在X轴方向有120个单位(Unity3D默认单位,下同),在Y轴方向有120个单位,在Z轴方向有1e-07个单位即1.0×10-7个单位。而目标物体的规格大小为(20,20,1e-07)。
场景搭建完毕之后,需要调整摄像机(Camera)的角度可视范围,即裁剪空间,其可将所需空间之外的图元剔除,空间内的有效图元信息保留,这样可以大量减少计算机的渲染工作量,提高效率。视锥体指的是Unity 场景空间中的一块区域,该区域决定了摄像机可以看到的空间。视锥体的投影有正交投影和透视投影,本研究采用透视投影。裁剪过后将摄像机的Clear Flags 调整为Solid Color,并将背景颜色设置为黑色(RGB=0, 0, 0),场景使用的光照为默认光照Directional Light,光照强度为1,得到图2 的效果图。
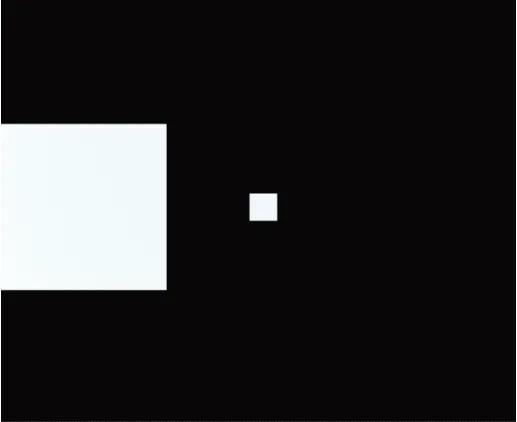
图2 裁剪空间内的场景示意Figure 2 Virtual simulation scene in the clipping space
得到裁剪空间内的场景之后,便可以将该场景处理为假体视觉下的场景,即得到像素化的视觉图像。本研究的方法是使用Unity Shader 中的屏幕后处理效果,在Unity 中,需要把屏幕后处理效果绑定在相机上,这也是游戏中实现屏幕特效的常见方法。首先,需要把正常的视野转化为灰度视野,编写Shader脚本用到的灰度算法为:

将该效果绑定相机后,便可以实时渲染场景图元,将正常视野场景转换为灰度视野场景。因显示窗口分辨率为1 280×1 024,故将显示窗口分割为60×48 份大小固定的正方形马赛克,每个马赛克的颜色用同样的颜色值表示,将每个马赛克裁剪为以正方形中心为圆心,半径不超过正方形边长二分之一的圆点,便得到仿真假体视觉下的像素化的试验场景,如图3所示。

图3 仿真假体视觉下的像素化场景Figure 3 Pixelated scene in stimulated prosthesis vision
本研究考察了5种不同因素对速度感知的影响:目标物体运动方向、目标物体运动速度、目标物体运动方式、目标物体不同形状以及不同环境对比度。考察目标物体运动方向对仿真假体视觉下的TTC 估计的影响时,本研究设计了4 种不同运动方向场景,每种运动方向场景中目标物体做该方向的匀速直线运动,目标物体运动方向的该方向边缘距离遮挡物体的同方向的边缘距离均为220 个单位,如表1所示。

表1 不同运动方向场景设计Table 1 Scene design for different motion directions
考察目标物体运动速度对仿真假体视觉下的TTC 估计的影响时,本研究设计了8种不同运动速度场景,每种运动速度场景中目标物体做水平向右匀速直线运动,目标物体右边缘距离遮挡物体右边缘的距离均为360个单位,如表2所示。
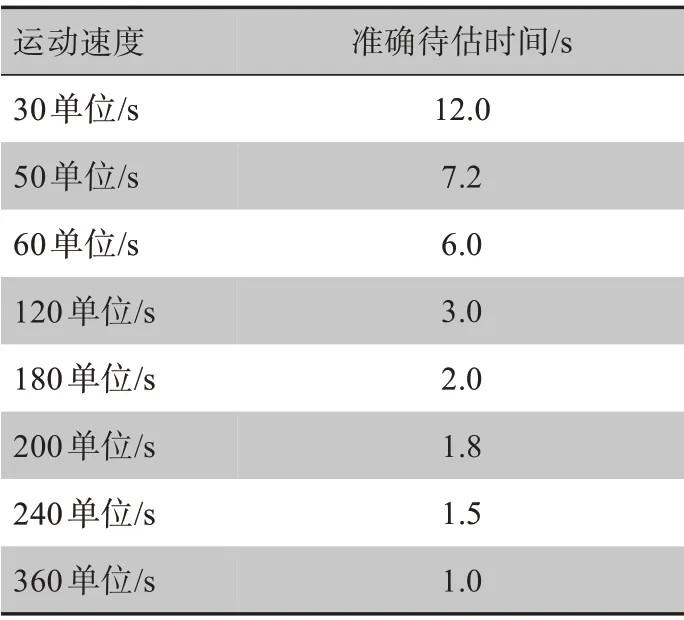
表2 不同运动速度设计Table 2 Scene design for different motion speeds
考察目标运动方式对仿真假体视觉下的TTC 估计的影响时,本研究设计3 种不同目标运动的方式:目标物体做匀加速直线运动、目标物体做匀速直线运动、目标物体做匀减速直线运动。每种运动方式场景中目标物体做水平向右直线运动,目标物体右边缘距离遮挡物体右边缘的距离均为360个单位,如表3所示。
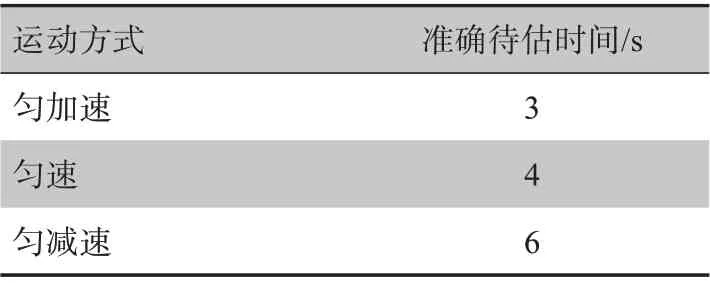
表3 不同运动方式设计Table 3 Scene design for different motion modes
考察目标形状对仿真假体视觉下的TTC 估计的影响时,本研究设计了5 种不同形状,如图4 所示,其中图4a~图4c 皆为正方形,但大小不同,图4d 形状为复杂图形,图4e形状为圆形,每种形状的目标物体做水平向右直线匀速运动,目标物体右边缘距离遮挡物体右边缘的距离相同,均为336 个单位,准确待估时间皆为4.2 s。
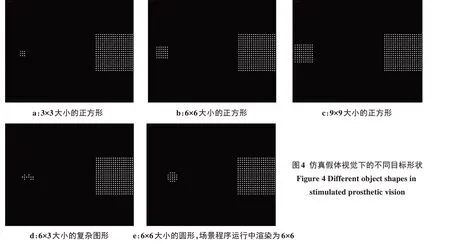
图4 仿真假体视觉下的不同目标形状Figure 4 Different object shapes in stimulated prosthetic vision
考察环境对比度对仿真假体视觉下的TTC 估计的影响时,本研究设计了3 种不同的环境对比度,如图5 所示,图5a为高对比度环境,图5b 为中对比度环境,图5c为低对比度环境,每种对比度下目标物体做水平向右直线匀速运动,目标物体右边缘距离遮挡物体右边缘的距离相同,为348 个单位,准确到达时间皆为5.8 s。
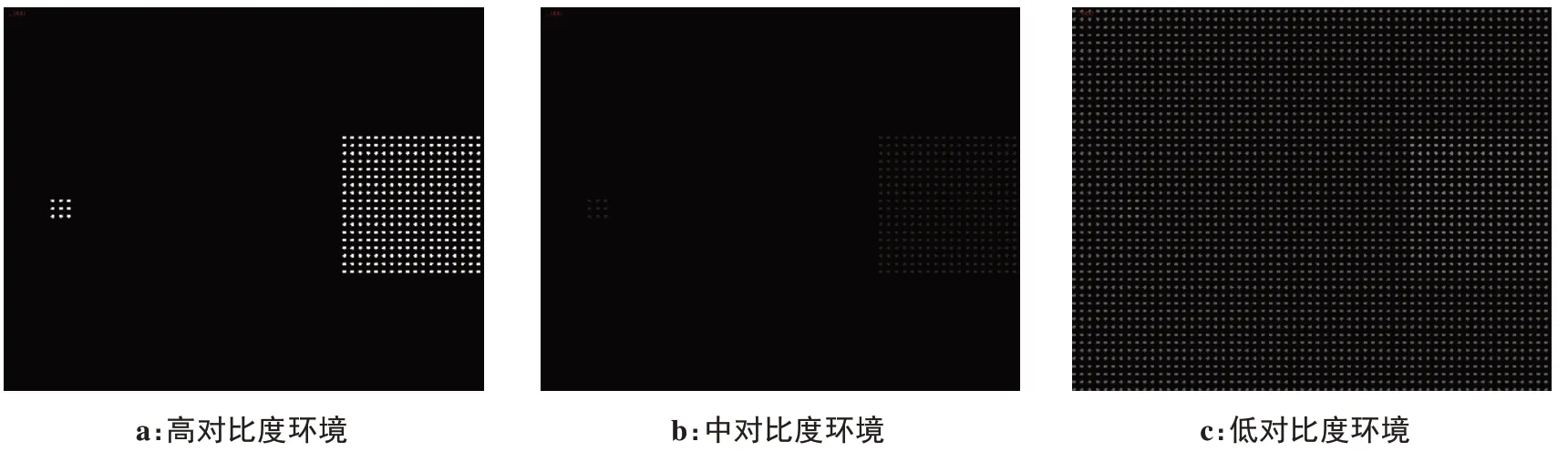
图5 仿真假体视觉下不同环境对比度Figure 5 Different environmental contrast levels in stimulated prosthetic vision
计时器UI 设计在每个试验场景的左上角,当被试者按下键盘上的“A”键时,场景程序开始运行,目标物体(Object)开始运动,计时器开始计时;目标物体按照一定规律进入到遮挡物(Shelter)后,被试者将不再看到目标物体,当被试者认为目标物体到达遮挡物的出口边缘时,迅速按下键盘上的“L”键,此时,目标物体不再运动,计时器停止计时,但被试者不会得到目标物体的位置反馈信息,整个试验过程中,被试者将不会看到计时器的时间信息。
2 试验步骤
2.1 预试验
正式开始试验前,让每一位被试者熟悉试验过程中的按键操作并进行几个随机场景的练习,要求被试者能够快速而准确地操作键盘按键。根据预试验来调整试验计划,准备开始正式试验。
2.2 正式试验
本研究的20名被试者(男10名,女10名)在安静且光照正常的环境下进行试验。试验所用的计算机主机连接两块显示屏,一块由试验员操控,随机选择仿真假体视觉下的某一场景用以被试者试验,另一块则为被试者观察屏幕,用以观察目标物体的运动规律和估计仿真假体视觉下的TTC。试验过程中,要求被试者坐姿端正,手指自然放到键盘上,被试者眼睛与显示器的距离约为60 cm,显示器屏幕高低随不同身高的被试者坐姿高低上下调节。可用ErgoLab 3.0 记录键盘事件、屏幕录制、处理和导出数据。本研究包含5 个参数试验,即目标物体运动方向、目标物体运动速度、目标物体形状、目标物体运动方式和环境对比度,为避免视觉疲劳,被试者每做完一个参数试验则休息若干分钟。
3 试验结果
3.1 运动方向因素试验结果
本研究采用TTC 估计偏差值的绝对值(Estimated Absolute value of time Deviation,记为EAD,单位为s)考察被试者对TTC 估计的准确度。对水平向右、水平向左、垂直向下、垂直向上4 个不同方向的EAD 进行重复测量分析,发现运动方向的主体内效应具有显著性差异(Mauchly 球形检验P>0.05,使用假设为球形的主体内效应检验F(3,57)=3.908,P=0.013<0.05,η²=0.171),对4 个方向采用相依样本T检验两两成对比较后发现水平向右和垂直向下方向的显著性P=0.020(双尾),水平向左和垂直向下方向的显著性P=0.021(双尾),而其他方向的成对的检验显著值均大于0.05,无显著性差异。水平向右的EAD 为(0.510±0.133)s,水平向左的EAD 为(0.469±0.136)s,垂直向下的EAD为(0.896±0.221)s,垂直向上的EAD为(0.658±0.165)s。由图6 可以看出,水平向右方向和水平向左方向都与垂直向下方向在估计时间上存在显著性差异,被试者在水平方向上的平均EAD 均小于垂直方向上的估计时间偏差,水平向右方向与水平向左方向要小于两个垂直方向之间的EAD 差值。
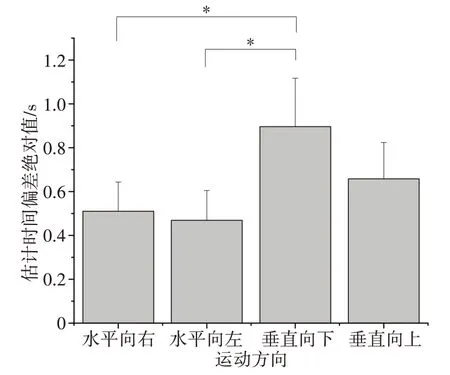
图6 不同运动方向的估计时间偏差绝对值(*P<0.05,n=20)Figure 6 Absolute value of estimated time deviation for different motion directions(*P<0.05,n=20)
3.2 运动速度因素试验结果
对仿真假体视觉下目标物体不同运动速度的TTC估计结果进行重复测量方差分析,发现运动速度的主体内效应具有显著性(使用Greenhouse-Geisser矫正值,F(2,42)=21.654,P<0.001,η²=0.533)。成对比较后发现被试者在速度为50与60、60与120、180与200、180与240、240与360单位/s的两两成对比较中没有显著性(P>0.05),而速度在120与200、200与240单位/s之间具有显著性(0.05>P>0.01),其余所有速度的两两配对检验中均具有较强显著性(P<0.01)。表4为不同速度的TTC估计结果(单位为s)。
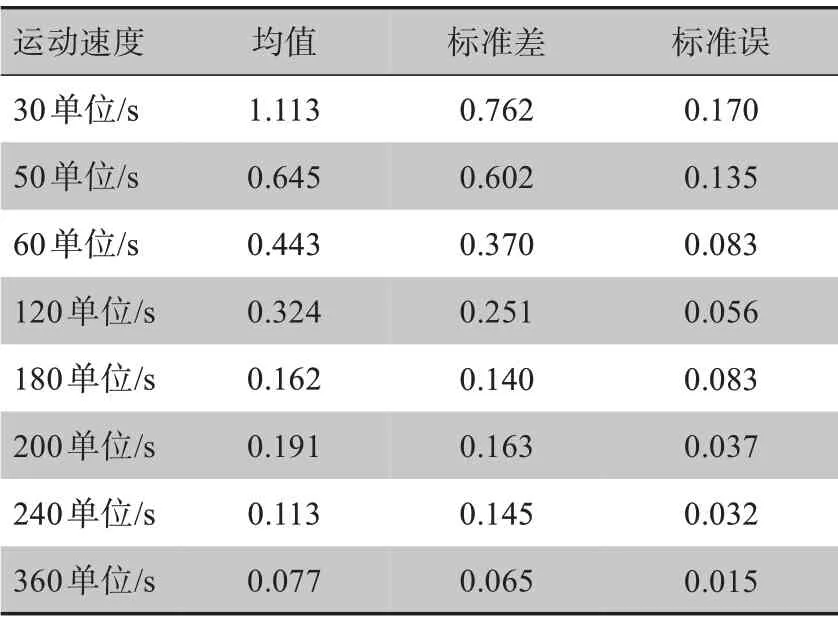
表4 不同速度的TTC估计结果(s)Table 4 TTC estimation results at different speeds(s)
由图7 可以得出,在仿真假体视觉下当目标物体运动速度较快时,例如360、240、200、180单位/s,其估计时间与实际碰撞时间的时间差异较小,其差异约为0.2 s 以下;速度较慢时,比如30、50 单位/s,其估计时间与实际碰撞时间的时间差异较大,其差异约为0.5 s 以上,这与正常视觉下对速度与碰撞时间估计的方差分析结果基本一致。
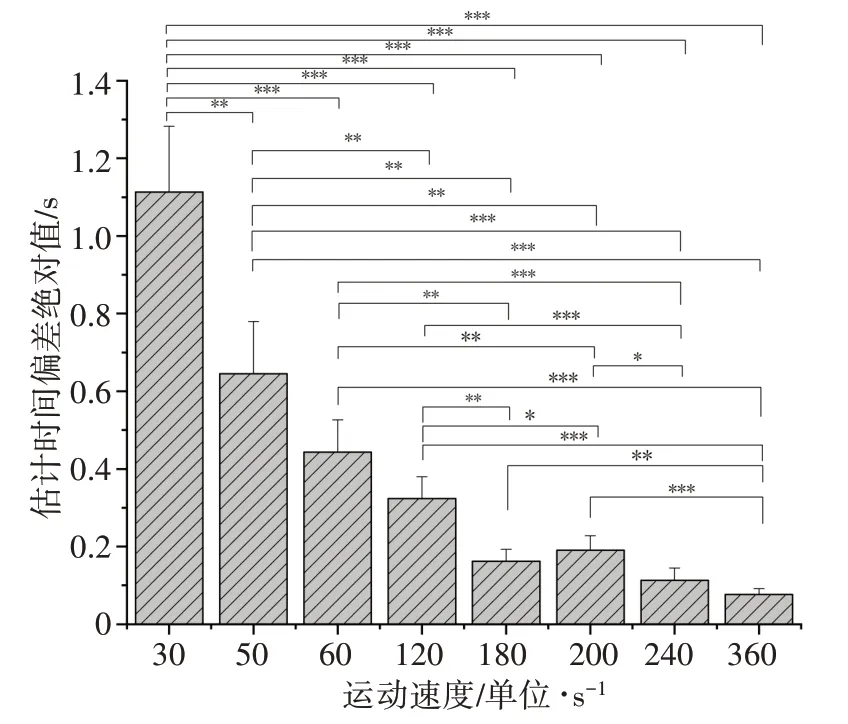
图7 不同运动速度的估计时间偏差绝对值(0.01<*P<0.05,0.001<**P<0.01,***P<0.001,n=20)Figure 7 The estimated absolute value of time deviation for different motion speeds(0.01<*P<0.05,0.001<**P<0.01,***P<0.001,n=20)
3.3 运动方式因素试验结果
对本研究设计的基于仿真假体视觉下3种不同目标物体的运动方式的TTC估计结果进行重复测量分析,Mauchly球形检验的显著性小于0.05,故使用Greenhouse-Geisser矫正值,得到F(2,28)=0.678,P>0.05,η²=0.034,不具有统计学显著性。当物体做匀速直线运动时,其EAD为(0.433±0.085)s,当目标物体做匀加速直线运动时,EAD为(0.489±0.070)s,当目标物体做匀减速直线运动时,EAD为(0.558±0.076)s,如图8所示。
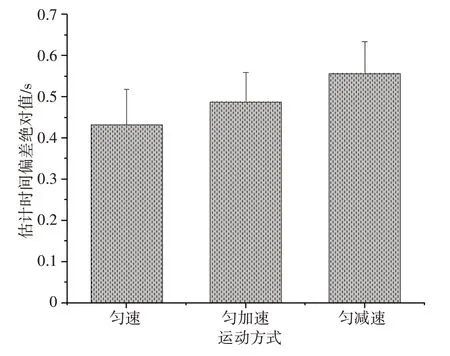
图8 不同运动方式的估计时间偏差绝对值Figure 8 Absolute value of estimated time deviation for different motion modes
3.4 目标形状因素试验结果
本研究设计了如图4 所示大小不一、形状各异的目标物体图形。对仿真假体视觉下目标物体不同形状的TTC 估计结果进行重复测量分析,得到Mauchly球形检验显著性为0.193,故符合球形检验标准,主体内效应检验F(4, 76)=3.845,P=0.007<0.01,η²=0.168,因此具有较强的显著性。表5为不同形状的TTC估计结果(单位为s)。
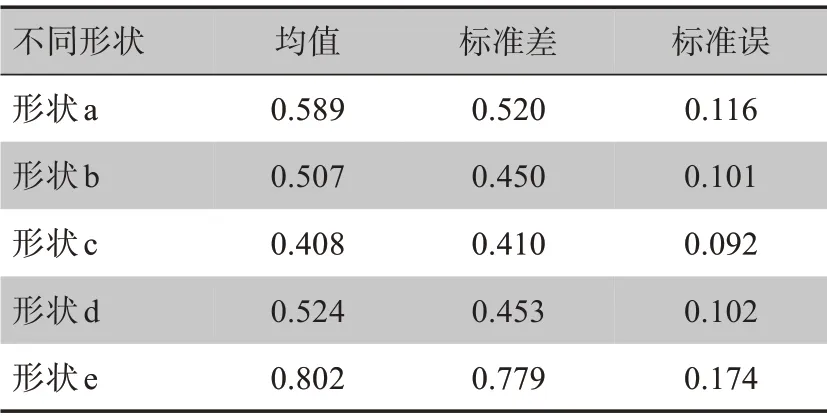
表5 不同形状的TTC估计结果(s)Table 5 TTC estimation results at different speeds(s)
图9 为不同目标物体形状的EAD 情况,可以看出,当遮挡物的大小一定,目标物体为同一形状时,物体越大,则被试者对TTC 的估计值越准确,形状a与形状c 的平均估计时间差值约为0.18 s;形状c、形状d都与形状e具有显著性差异,形状c与形状e具有较强的显著性差异,二者的EAD偏差值约为0.39 s。
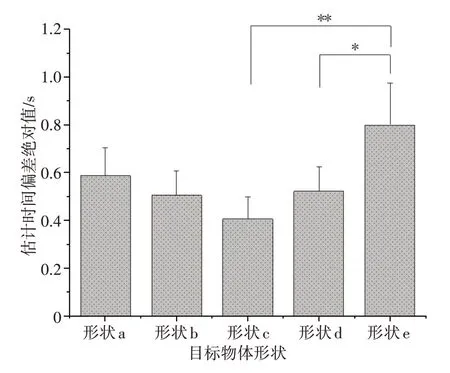
图9 不同目标物体形状的估计时间偏差绝对值(0.01<*P<0.05,**P<0.01,n=20)Figure 9 Absolute value of estimated time deviation for different target object shapes(0.01<*P<0.05,**P<0.01,n=20)
3.5 环境对比度因素试验结果
本研究设计了如图5所示的仿真假体视觉下3种不同的环境对比度a、b、c。对3 种不同环境对比度下的目标物体TTC 估计结果进行重复测量分析得到Mauchly球形检验的显著性为0.127>0.05,符合球形检验标准,主体内效应检验为F(2,38)=8.318,P=0.001,η²=0.304,故该检验具有较强的显著性。
如图10 所示,3 种环境对比度中,环境b 的EAD最大为(0.713±0.110)s,环境a 的EAD 次之,为(0.584±0.120)s,环境c 的估计值最为准确,其EAD为(0.362±0.057)s。环境a 与环境c 具有弱显著性,环境b与环境c具有强显著性。
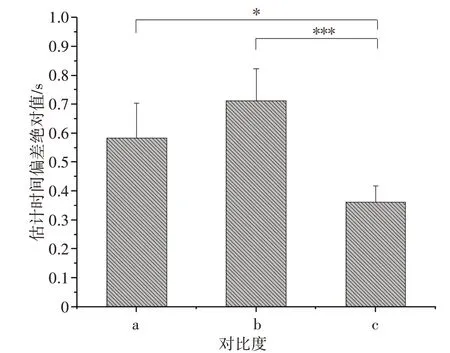
图10 不同环境对比度的估计时间偏差绝对值(0.01<*P<0.05,***P<0.001,n=20)Figure 10 Absolute value of estimated time deviation for different environmental contrast levels(0.01<*P<0.05,***P<0.001,n=20)
4 结果与分析
4.1 运动方向因素试验结果分析
对于不同运动方向对目标物体的运动感知来说,出现这种情况的一种解释是重力理论,即在试验中被试者大脑中使用了包含重力效应的内模型,当物体垂直向下做匀速直线运动时,被试者会在重力效应的内模型中加入一种垂直向上的反重力,使得与重力相平行的运动方向上的距离比与重力垂直运动方向的距离更远,这种解释的证据来自于运动所需的肌肉努力,在爬坡或者楼梯时会比走平路花费更多努力;还有一种解释是生理学上的解释,认为视网膜的神经解剖结构、角膜的屈光性和眼睛运动是导致水平方向和垂直方向上出现错觉的原因,比如,在重力条件下,眼睛的垂直方向运动要难于水平方向运动。Ritter[18]认为视网膜的不对称结构是高估垂直方向距离的原因。而Luckiesch[19]认为眼部的肌肉排列使得眼睛在垂直方向的运动比水平方向运动要花费更多努力。
4.2 运动速度因素试验结果分析
试验发现,在目标物体相对快速运动时,被试者高估速度导致提前按键的次数比目标物体相对慢速运动时被试者提前按键的次数多,比如,当目标物体运动速度为360和200单位/s时,被试者提前按键的次数分别为7次和9次,分别占该速度试次的35%和45%,而在30和50单位/s时,被试者提前按键的次数分别为4次和5次,分别占该速度试次的20%和25%,之所以出现这种情况,很可能是因为与速度伴随效应(Speed coupling effect)有关。Donkelaar等[20]研究发现,当伸手拦截移动物体时,目标物体移动越快,伸手运动的时间越短。本研究中,在目标相对快速运动时,被试者为了补偿从看到目标物体运动到启动手按动键盘之间的时间延迟,从而采取提前按键的做法,这也是速度伴随效应出现原因的另一种解释。本研究的估计时间水平参考之前的研究报道以及模拟日常生活中的一些速度参考,比如Rolin等[21]提出1.5 s到2.0 s之间是TTC范式下估计反转的时间阈值;田雨等[22]发现1.2和1.8 s的时距范围可能正好在人能较为准确地感知时距范围。在日常生活中,人类行走的速度、非机动车辆的速度、机动车辆三者的速度比值大约为1:4:8。
4.3 运动方式因素试验结果分析
虽然仿真假体视觉下目标物体3 种不同的运动方式对TTC 的EAD 并无统计学意义的显著性,但是通过图8 可以得知,相对于变速运动的物体,被试者对做匀速物体的TTC 估计值更加准确;在变速运动中,显然被试者更倾向于准确估计加速运动的物体,这与速度因素的影响大致相同,即速度越快,被试者准确估计TTC 的偏差值越小,试验结果还可能说明比起运动方式的影响,目标物体的起始速度对被试者估计TTC的准确性影响较大。
4.4 目标形状因素试验结果分析
对于试验结果,这种情况的出现可以认为是形状c 与形状d 的边界棱角较为分明,而形状e 边界棱角较为模糊所致。实际上,在英文中表达精确数字(Sharp numbers)与多棱角图形(Sharp shapes)共享相同的英文单词“Sharp”,而大概数字(Round numbers)与圆润形状(Round shapes)有相同的英语单词“Round”[23]。在汉语中,“尖锐”和“圆润”常常被引申用来表达“精确”与“粗略”的意思。而在杨晨等[24]不同形状背景下被试者对不同数字信息的平均反应试验中,对于精确数字的反应,多角图形要比圆润图形的反应时低0.15 s,这表明人们在估计TTC 时,对于多角图形(本研究为正方形和复杂图形)的估计值可能比圆润图形(本研究为圆形)更加准确。
4.5 环境对比度因素试验结果分析
由上述环境对比度试验可知环境b 的对比度弱于环境a,在生活中,夜晚的环境对比度通常要弱于白天的环境对比度。在夜晚,观察物体常用的是视杆细胞而非视锥细胞,而视杆细胞相对于视锥细胞的时空分辨率较差,对比度灵敏度较低,Gegenfurtner等[25]研究证明,在运动知觉方面,使用视杆细胞观察物体比使用视锥细胞时要慢。Brooks 等[26]也发现对比度的降低会导致人们对速度的低估。试验场景要实现低对比度的环境,在环境c 中增加了背景组件即试验场景中铺满的像素点,当处于环境c 中的目标物体开始运动时,其在某段时间内位移的距离便有了参照依据,即给与被试者在仿真假体视野下观察目标物体相对于背景像素点在单位时间内的变化。这就像是在正常视野下判断道路上行驶的汽车速度一样,环境c 给出了道路两旁树木之间的固定间距,而环境a、b 均未给出参照物,因此,估计移动物体的碰撞时间时,有参照物的情况下的估计结果更加准确。
4.6 性别差异分析
为了探究性别对于TTC 估计的影响,对试验中性别差异下不同影响因素的估计结果进行方差分析,得到如图11 所示的结果。对性别差异所得的估计结果进行显著性分析,虽然并未得到统计学意义上的显著性结果,但是从图11 中可以看出,在仿真假体视觉下,对于运动方向因素来说,男性对运动物体TTC 的估计结果比女性更加准确,且每个方向的平均EAD 都小于女性,说明男性仿真假体视觉下在运动方向的知觉感知要优于女性。Murray 等[27]的光栅刺激运动方向辨别试验也证实了正常视觉下的这一观点。
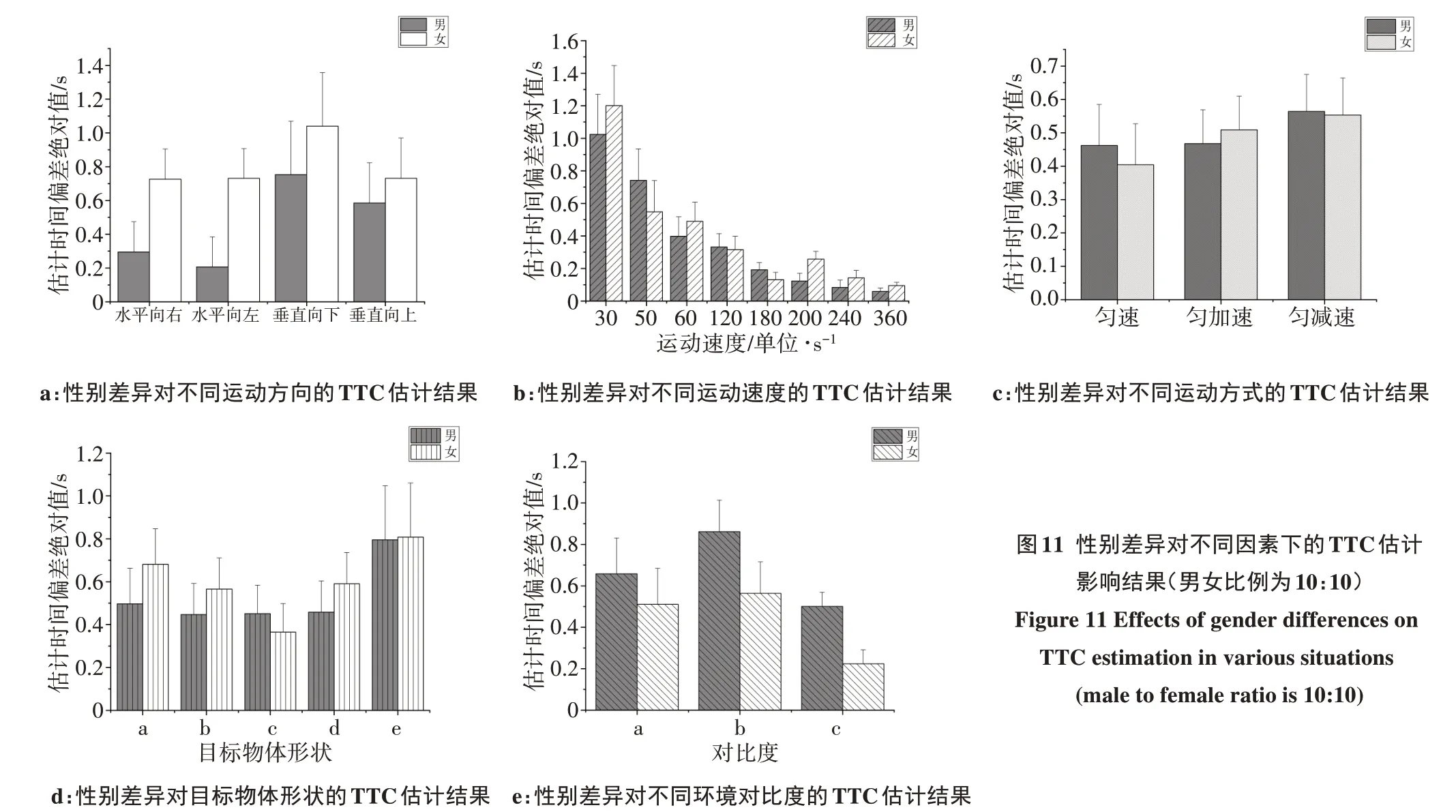
图11 性别差异对不同因素下的TTC估计影响结果(男女比例为10:10)Figure 11 Effects of gender differences on TTC estimation in various situations(male to female ratio is 10:10)
对于运动速度因素,男性在相对快速运动的物体TTC估计准确度上要高于女性,例如在200、240、360单位/s时,男性的平均EAD值都明显低于女性。而对于相对中速或者慢速来说,男女之间并无明显的优势之分且不论是男性还是女性,其在物体运动为中速或慢速条件下的估计准确度要低于物体快速运动时的估计准确度,例如30、50、60、120、180单位/s。
对于运动方式因素,女性显然在匀速运动下的估计表现优于男性,但女性在估计匀加速运动物体的TTC 时,则刚好相反,而到了物体做匀减速运动时,男性的平均EAD 值则又超过了女性;对于目标物体形状因素,女性对于不同形状的EAD 值起伏较大,说明女性对于各种不同的形状更为敏感。
这3 种因素的试验结果皆符合狩猎者-采集者假说[28](hunter-gatherer hypothesis),该假说认为,在古老的原始社会,男性需要外出狩猎,这就需要男性具有运动方向和较快运动速度方面的敏锐感知,而女性则担任采集野果的任务,所以女性对于形状的感知较为敏感,即女性对不同目标物体形状的TTC 估计值的峰值与谷值差要高于男性。
对于环境对比度因素,正常视觉下,男女在对比度敏感方面并没有差异,但在本研究中的每个试验场景中,女性的TTC 估计准确度均高于男性,这可能是由于本次试验所用的场景为仿真假体视觉场景,其试验任务和视觉刺激不同所致。
5 总结与展望
本文研究是在虚拟现实场景中进行的仿真假体视觉感知试验,所获结果如下:(1)在仿真假体视觉下,运动方向对碰撞时间的估计影响显著,被试者对于水平方向上的估计准确度要高于垂直方向上的估计准确度;(2)在仿真假体视觉下,运动速度对碰撞时间的估计影响显著,被试者对于相对快速运动的目标物体的估计准确度要优于相对慢速运动的物体的准确度,在目标物体运动相对快速的情况下,被试者提前按键的比例要高于物体相对慢速运动的情况;(3)在仿真假体视觉下,运动方式对碰撞时间的估计影响不显著,但被试者更倾向于准确估计匀速运动的物体,相对于目标物体的运动方式,其起始速度对碰撞时间估计的准确性可能影响性更大;(4)在仿真假体视觉下,目标物体的形状对碰撞时间的估计影响显著,当遮挡物的大小一定时,物体越大,被试者估计的准确性越高;被试者对多角图形的运动比圆润图形的运动更加敏感;(5)在仿真假体视觉下,环境对比度对碰撞时间的估计影响显著,在没有环境参照物的情况下,环境对比度越低,被试者对目标物体碰撞时间的估计准确度越低;被试者在有环境参照物的情况下对物体碰撞时间的估计比没有环境参照物的情况下估计的更好,准确度会提高;(6)对于性别差异,在本研究中,男性在不同方向以及相对较快速度场景下的碰撞时间估计准确度要高于女性,而女性对于不同形状的变化则比男性更加敏感,对于不同的环境对比度,女性的TTC 估计结果要优于男性。
综上所述,本研究采用虚拟现实场景进行仿真假体视觉试验,着重分析方向、速度、运动方式、物体形状以及环境对比度5 种单因素对于假体视觉下被试者估计碰撞时间的影响,可为视觉假体植入后的训练康复提供有效的理论支持。在日常生活中,假体佩戴者所观察到的视觉场景将更为复杂,对于物体运动的情况也会更加多变。因此,假体视觉下对于物体运动速度估计的双因素乃至多因素分析也值得进一步讨论和研究。