基于传感器的节水灌溉模型预测控制策略研究
2022-10-09任强
任 强
(西安文理学院 信息工程学院,陕西 西安 710065)
0 引言
农业是全球主要的用水大户,该产业大约使用了世界上70%的可用淡水资源,主要用于农作物灌溉。世界农业灌溉平均用水效率为50%~60%,这么低的效率主要是由于对这一自然资源的管理不当。水管理缺乏和管理方式不当不但会造成水资源的浪费[1],而且还会大幅度降低作物的生产力。节水灌溉是指根据作物需求进行灌溉调度的管理[2]。施于作物的水量是基于对土壤、作物和天气变量的测量,这些变量反映了作物的生长状态。节水灌溉的主要目标是利用无线传感器网络、移动设备、遥感、实时控制和信息系统等技术,提高用水效率,降低能源消耗,使作物产量最大化[3-4]。
如今,市场上提供的大多数商业自动灌溉系统都是按预定时间间隔进行灌溉的[5]。灌溉计划是离线定义的,它通常基于用户对作物需求、土壤特性和天气因素的经验常识。一些农户使用作物蒸散[etc(t)]数据来确定灌溉的时间表。蒸散是指土壤表面蒸发和作物蒸腾所造成的水分损失,因此,大量的水被用来补充植物和环境消耗的水。目前,市场上出现了新的商业自动控制器,它通过实施闭环灌溉控制来调节土壤湿度,从而控制水的使用。当传感器检测到土壤湿度低于预先设定的低阈值时,这些控制器就会激活灌溉;而当土壤湿度高于高阈值时,控制器就会停止灌溉。开关控制也可以通过直接测量植物冠层来实现,例如通过测量空气和冠层温度以及水汽压来获得作物水分胁迫指数。然而,由于从冠层获得实时测量的数据很困难,因此很难找到直接测量植物的商业灌溉控制器。
近年来,由于控制技术在节水灌溉中的应用显示出了大量的节水效果,农业工程师和控制部门越来越重视实时闭环灌溉控制系统的分析和实现。在该领域主要是将无线传感器网络(WSN)、实时控制器和信息系统等技术集成起来实现自动灌溉系统。韩晨燕等[6]开发了基于土壤湿度和土壤温度无线网络传感的自动灌溉系统,以优化农作物的水分利用;该系统是在一个有机鼠尾草温室进行评估的,由湿度或温度激活开关来进行灌溉控制。Navarro-Hellin等[7]对商业人工林进行了不同的实验,以便根据土壤湿度测量值来管理灌溉,从而验证了对木本和蔬菜作物实施开关控制的可行性。高翔[8]开发了一个无线传感器网络来获取田间土壤特性数据(土壤湿度、电导率和土壤温度),并与预先设定的阈值进行比较,从而激活或停用滴灌。Kim等[9]开发了一个自动闭环灌溉控制系统,灌溉决策是根据土壤水条件的反馈,通过控制喷头组的开关时间而做出的。虽然这些方法考虑了详细的实现问题,但它们不包括过程动态模型,因此,控制器设计较简单。
本文描述了采用基于传感器的模型预测控制(Model Predictive Control, MPC)方法实现节水灌溉系统的设计,通过实验识别并验证过程动态,以设计在嵌入式系统平台上实施的预测算法,最终实现农业活动用水的优化。该工作扩展了模拟闭环灌溉的模型预测控制策略,对数学模型进行了改进和实验验证,在嵌入式平台上实现了预测算法,实现了滴灌领域的自动化,并将评价作物的结果与采用典型商用方法获得的结果进行了比较。模型预测控制是一种基于有限层数值优化的最优控制策略。MPC需要繁重的计算工作才能实现优化,其中使用数学模型预测未来的控制输入和未来的过程响应[10],并根据成本函数进行优化。模型预测控制已被作为一种适用于大型配水系统的技术。提高农业灌溉系统的效率有助于可持续的水管理,而灌溉效率的提升可以通过自动灌溉系统来实现,该系统包括基于水、土壤和作物关系的实时控制策略。
1 模型背景
1.1 水文平衡
利用水文平衡模型可以描述农业灌溉系统的过程动态[11-12]。该模型可以确定特定时间段内水存储量的变化,水存储量是水流入量(灌溉、降雨、毛管上升)与水流出量(蒸发、径流和深层渗透)的差值,如图1所示。
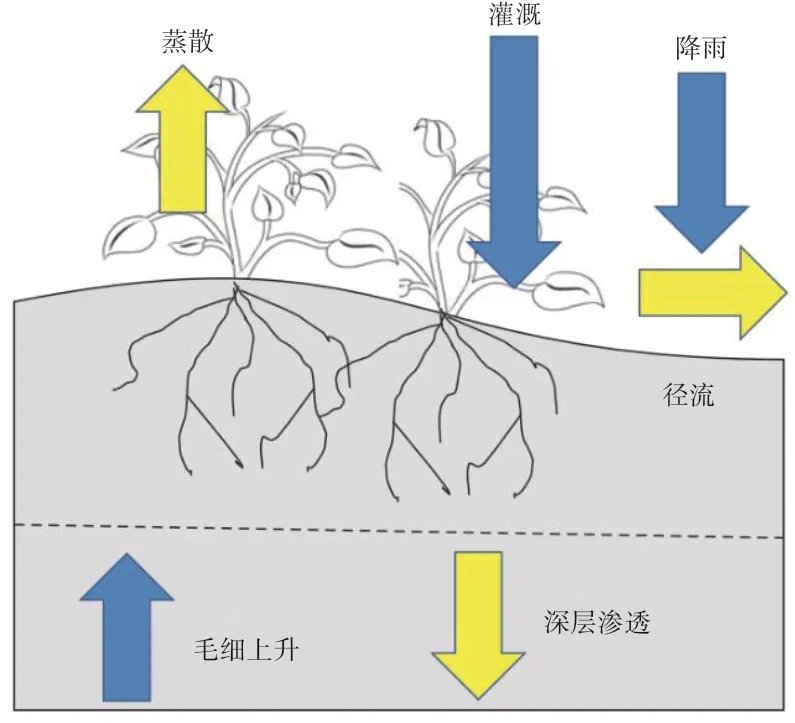
图1 灌溉系统水文平衡的组成部分


1.2 土壤水分蒸散损失总量
作物蒸散是指土壤表面蒸发和作物蒸腾所造成的水分损失。蒸散速率通常以单位时间(计量单位通常为d)的蒸散量(即从裁切表面损失的水量,计量单位通常为mm)表示,每天1 mm的蒸散量相当于每天每公顷损失10000 L水量。作物蒸散量取决于天气因素和作物特性(作物类型、生育阶段)。任何作物的需水量都可以通过将蒸散的天气因子乘以取决于作物具体特征的系数来计算[13-14],其计算公式如下:

式(3)中:Kc是恒定的作物系数,取决于作物类型及其发育阶段,该系数是已知的,并且与环境条件无关;参考蒸散eto(t)仅取决于天气参数,可以通过太阳辐射、风速、空气温度和相对空气湿度等变量进行测量。
1.3 土壤体积含水量
土壤体积含水量在农业生产中起着重要的作用。土壤含水量是指土壤中水分的总量,也称为土壤体积含水量(Volumetric Water Content,VWC)。体积水含量(θ)表示特定体积的水量百分比,公式为:

式(4)中:VW是特定样品的水含量;VT是总样品量(土壤+水+空气)。对于任何作物的正常生长发育来说,土壤体积含水量需要保持在永久萎蔫点以上、田间持水量以下。永久萎蔫点是指植物不能再从土壤中吸收水分的土壤湿度水平。田间持水量是重力排水后土壤体积中贮存的水量。土壤有效持水量(可用水量)是指作物所能获得的水量,它表示的是位于永久萎蔫点以上、田间持水量以下的土壤水分值范围,如图2所示。当土壤体积含水量低于田间持水量后作物受到胁迫的点称为最大允许消耗;当作物受到土壤水分不足的胁迫后仍然能够从土壤中吸收水分。最大允许消耗通常用可用水量的百分比表示,对于大多数农作物而言,一般取50%。田间持水量和永久萎蔫点受土壤质地分类的严重影响,例如,粉壤土(通常用于农业目的)的典型含水量范围为0.3~0.4。
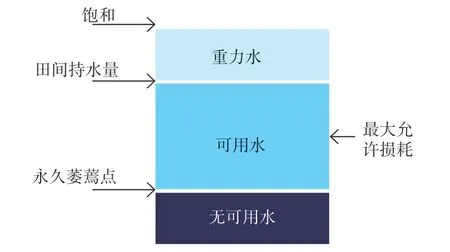
图2 土壤体积含水量参数示意图
2 材料与方法
2.1 植物动力学模型
基于水文平衡式(2),可以将灌溉系统的过程动态描述为具有2个输入(有效灌溉和参考蒸散)和1个输出(土壤水分)的方框图,如图3所示。
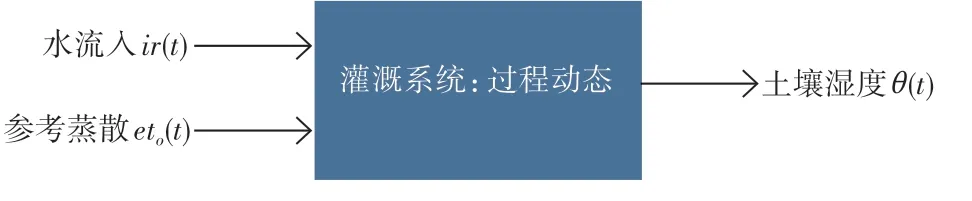
图3 灌溉系统的输入和输出
图3中的参考蒸散eto(t)是用来代替作物蒸散etc(t)的,因为eto(t)只取决于外部气象参数。此外,由于假定灌溉系统中的水渗透明显与土壤水分成正比,因此,在该区块中不存在深层渗透dp(t),故可以将式(2)改写为:

式(5)中:c0是1个常数,表示土壤水分和深层渗透之间的比例关系;τ代表从灌溉开始至传感器检测到土壤水分变化的时间延迟。
由于需要离散模型,因此对土壤水分变化进行欧拉近似处理,其公式如下:

式(6)中,h是采样间隔。联立式(5)和式(6),离散时间动力学模型由下式得出:

可以分别将c1、c2和c3用作吸收先前系数h、Kc和c0的3个离散系数。可以通过使用以下形式的一阶状态空间表示重新构造的公式(7):

式(8)中,c1、c2和c3是定义过程动态的系数,可以从蒸散、土壤水分和有效灌溉的直接测量值中获得。
2.2 土壤水分总体动态
虽然土壤水分动力学模型可以用1个著名的随机微分方程(2)来定义,但由于测量值的空间变化很大,且存在空间变化和时间变化的过程(灌溉、渗透、蒸散等),因此对大面积土壤水分变化的估计是非常复杂的[15]。由于土壤水分的测量可以在空间尺度上(小到米级)变化,因此土壤水分的变化是具有高度非线性的行为。此外,排水速率依赖于地形变化,水的运动取决于难以量化的异质性,甚至由于土壤和植被的变化,蒸散也在空间上和时间上发生变化。土壤水分的总体动态如图4所示。
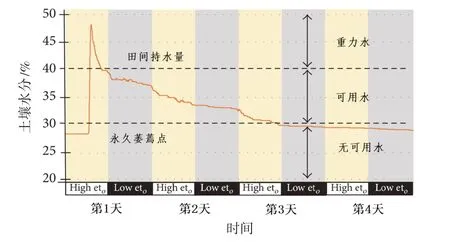
图4 土壤水分的总体动态
灌溉使土壤含水量达到饱和水平,过量的水迅速排出,直到达到田间持水量。当土壤水分低于田间持水量时,水分的吸收速度较慢,这取决于作物的蒸散。因此,代表水分枯竭率的土壤水分斜率在白天较高,而在夜间较低。当土壤水分到达萎蔫点时,植物就不能再从土壤中吸取水分了。在萎蔫点以下,耗竭速率更慢,而且主要取决于土壤特性。
2.3 模型预测控制
为了实现闭环灌溉系统的控制,采用模型预测控制,使控制信号(有效灌溉)最小化,同时保持土壤湿度在特定阈值下(避免水分胁迫)。图5显示了1个反馈回路,其控制目标是将土壤含水量保持在一定阈值内,以便获得健康、高产的作物。因此,过程变量y(kh)为土壤水分,r(kh)为参考值(土壤湿度设定点),误差值e(kh)是由过程值和参考值之差获得的。影响灌溉系统的环境因素被建模为外部干扰模型,因此参考蒸散eto(kh)表示影响过程的干扰信号。通过了解干扰模型,系统可以在扰动影响过程输出之前预测扰动效应并作出反应。

图5 模型预测控制回路
给定由式(8)定义的闭环灌溉系统的动力学模型,控制器利用递归最小二乘法得到在线估计内部模型,从而了解过程动态。在控制器中,根据电流误差和干扰测量值执行数值优化算法,将该信息应用于内部模型,并在有限水平TFH上找到了最优解,该最优解基于误差和控制信号最小化二次成本函数,如下式所示:

式(9)中,矩阵Q为正半定值,矩阵R为正定值,分别表示成本函数内赋予误差和控制作用的权重。
最小化J(kh)问题的最佳输入序列表示如下式:

满足如下方程组:

在特定时间u(kh)的灌溉只能有2个值:灌溉关闭[u(kh)=0]或开启[u(kh)=Imax]。土壤湿度值θ(kh)受传感器提供的测量范围的限制。该算法可以确定开始灌溉的时间以及农作物需要的水量。因此,通过将土壤含水量低阈值和灌溉周期调整为最佳值,可以获得最优输入序列u*(kh)。该算法从kh开始,先读取土壤水分、灌溉和参考蒸散的当前值,这些被视为初始条件,并分别以θ(0)、ir(0)和eto(0)表示;然后,对于土壤含水量低阈值向量θLT和灌溉期向量irp的预定义值的每种组合,该算法在有限输入范围TFH上估算下一个状态预测的序列,同时更新输入,应用控制规则并计算总成本;最后,找到θx和iry的最佳组合,从而提供最佳控制规则来确定最佳输入序列。
3 实验和结果
3.1 建立实验平台
实验平台由数据采集和控制系统组成,其中采用了模块化和可扩展的设计方法,以便为不同级别的访问提供不同的数据内容。在较低的级别,可以获得来自传感器的原始数据;在较高的级别,可以从系统中获得更精确和统一的信息。实验平台分为3个访问层(地面植被层、数据层、用户层),并且能够控制4个灌溉区域,如图6所示。
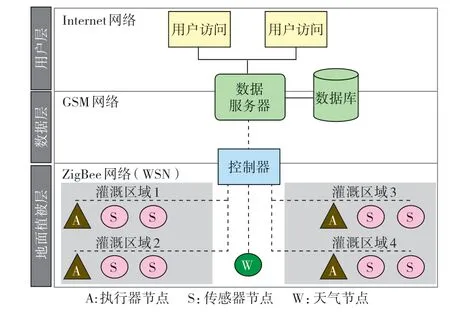
图6 数据采集和控制系统架构
在地面植被层,共有4个灌溉区域,每个区域包括2个传感器节点和1个执行器节点。4个灌溉区域只能使用1个天气节点,因为环境变量对于整个地面植被区域实际上具有相同的值。执行器节点控制灌溉阀并测量水流量;同时,每个传感器节点包含3个土壤湿度传感器,以测量作物根系的含水量,如图7所示。
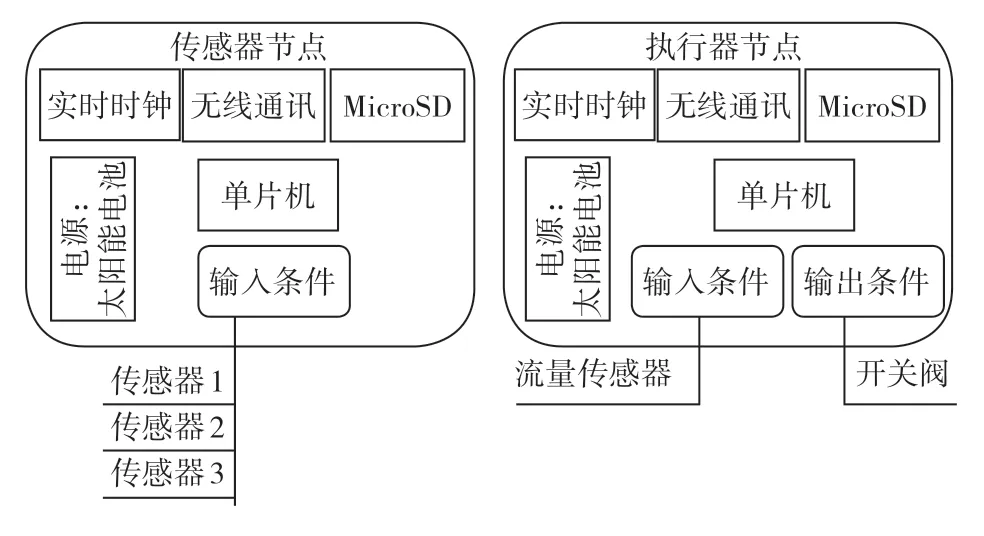
图7 传感器和执行器节点的实现
在数据层,实现了1个无线传感器网络(WSN),其中控制节点从不同的传感器原始数据生成聚合信息。WSN是通过IEEE 802.15.4标准实现的,该标准是ZigBee通信协议的基础。ZigBee由于具有低成本、低功耗、小数据包等特点,已经成为无线传感器网络的实际标准。该无线通信元件由射频收发器实现,该收发器在2.4 GHz下工作,数据速率为9600 bps,开放范围覆盖1.6 km。该模块具有双重网络访问功能,因为它与无线传感器网络通信,还包括通过GPRS标准与数据服务器的远程通信访问。GPRS元件由集成电路组成,实现了调制解调器的功能。
在用户层,数据服务器模块由1个多核服务器实现,该服务器包括Web服务、Internet访问和1个数据库,以便存储位于偏远地区中心模块的信息。该数据库是通过开源平台实现的,用户可以通过Web页面访问数据。
3.2 评估方法
自动灌溉系统的目标是通过在适当的时间有效地利用水资源进行灌溉,以避免作物缺水和浪费水。灌溉方法大致有5种:0级灌溉(经验式开环灌溉),即手动灌溉;1级灌溉(基于时间的开环灌溉),其自动系统由定时装置组成,定时装置按预先设定的程序启动泵和阀门;2级灌溉(前馈式开环灌溉),其控制器应用灌溉来补充作物和环境消耗的水;3级灌溉(闭环灌溉),当传感器检测到测量值低于预定的低阈值时控制器应用灌溉,而当达到高阈值时则停止灌溉,该灌溉方法通常用土壤含水量做测量变量;4级灌溉(基于模型的闭环灌溉),其控制系统包含描述过程动力学的数学模型,并使用模型预测控制策略来实现最佳解决方案。
3.3 评估结果
实验场是4个20 m×10 m的连续灌溉区域,总面积为800 m2(80 m×10 m),每个区域都有1个开关阀来启动灌溉。
本实验比较了4种评估灌溉方法的累积误差和控制作用力,这2个参数的值越低则性能越好。累积误差可以表征该系统土壤湿度保持水平接近参考值的良好程度。最大允许耗水水平被认为是过程的设定值或参考值,因为低于这个水平的作物会缺水,高于这个水平则会浪费水。
在30 d的评估期内,每种评估方法的耗水量结果如表1所示。表1中第3列数据为4级灌溉方法与其他方法相比的节约用水百分率。每种方法在15 d以内的耗水量如图8所示。结果表明,利用控制策略的数学模型(4级灌溉)可以实现有效的节水目标,获得较好的节水效果。
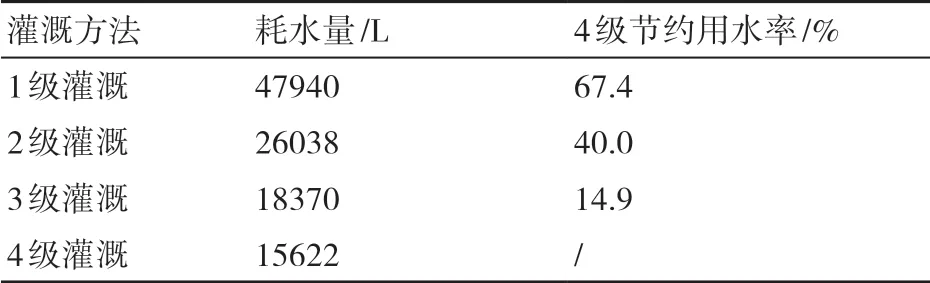
表1 各灌溉方法的耗水量
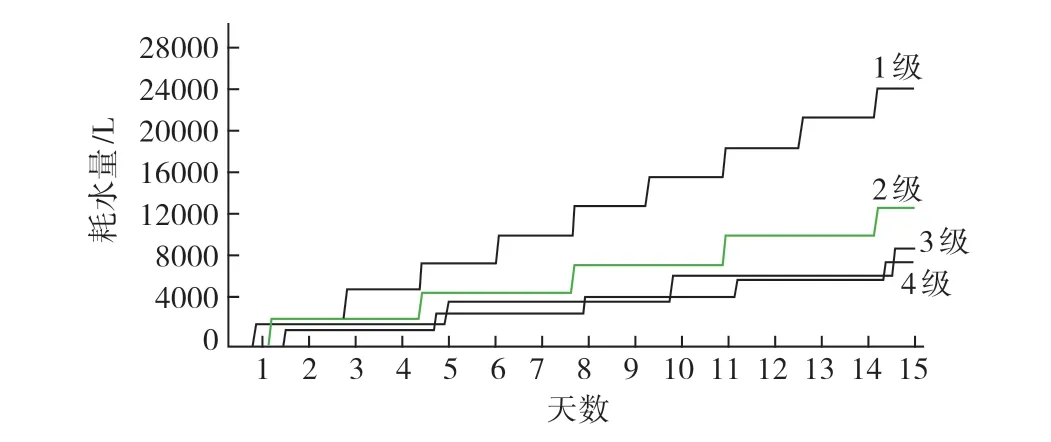
图8 各灌溉方法在15 d以内的耗水量变化
4 小结
本文提出了1种基于传感器的节水灌溉模型预测控制策略。使用水文模型描述灌溉系统的过程动态,因此,可以预测蒸散量和土壤水分变量,以便实施模型预测控制(MPC),从而在保持土壤湿度的同时将控制信号(有效灌溉)最小化。同时,在特定的阈值下(避免水分胁迫)并考虑外部干扰(参考蒸散量)来预测过程动态。为了估计模型的参数,使用了递归最小二乘算法。这些参数已通过使用灌溉系统的直接测量数据得到了验证。同时,在嵌入式平台上实现了该预测控制策略,以评价该灌溉方法与农民传统灌溉方法的优劣。实验结果表明,在灌溉系统中采用基于传感器的节水灌溉模型预测控制策略,使控制效率得到提高,且明显降低了耗水量,达到了节水的目的。
