考虑细化用户群体的全自动驾驶汽车使用意愿
2022-10-08崔馨玥,赵胜川
崔 馨 玥, 赵 胜 川
(大连理工大学 交通运输学院, 辽宁 大连 116024)
0 引 言
自动驾驶汽车的社会效益在于减少交通事故、缓解交通拥堵、高效地使用燃料并降低排放[1].将自动驾驶汽车作为公共交通工具可以使交通系统更加清洁,使城市交通可持续发展[2].随着中国5G网络及自动驾驶汽车的实验和落地,公众对自动驾驶汽车的接受态度也会发生变化,态度在一定程度上会影响人们的使用意愿[3],进而影响行为.公众使用自动驾驶汽车的态度和意愿,将有助于推动自动驾驶技术的落地和自动驾驶汽车进入市场.因此,了解行为意向至关重要.此外,更好地了解公众的接受态度并区分潜在用户群体,识别群体特征,可以为未来自动化交通背景下的自动驾驶汽车发展提供有针对性的建议.
随着技术接受模型等行为理论的完善和成熟,国内外学者越来越关注用户的内在感知,基于内在感知态度的分析常应用潜变量模型.Panagiotopoulos 等[4]提出了社会影响对使用意愿的作用,结果显示感知信任和社会影响对使用意愿有积极影响.社会影响被越来越多的研究者[5-6]加入结构中.Acheampong等[2]在研究中提出感知收益,并发现其对采用行为的积极影响.Liu等[7]的研究也验证了感知收益的正向促进作用.很多自动驾驶汽车市场细分的研究根据态度对受访者进行了群体分类,探究不同群体间的异构性,对于不同的群体可以更有针对性地提出相应改善措施.El Zarwi等[8]使用潜在类别选择模型,将受访者分为3类,不同群体的社会经济属性显示,非采用者所占比例最多(82.98%),高收入群体和男性更有可能是早期采用者.Nielsen等[9]使用主成分分析,根据受访者对自动驾驶汽车的态度和期望将群体分为怀疑型、热衷型和冷漠压力型驾驶员.其中,对自动驾驶汽车充满热情的热衷型通常是男性、年轻人,居住在大都市地区,而怀疑型则是居住在人口密度较低地区的老年人.Hardman等[10]发现,不同群体间在收入、性别、年龄、受教育程度、家庭用车数、家庭人数等方面均有统计学差异.Berrada等[11]使用层次聚类研究了受访者的个人属性及使用意愿,划分出5类群体.潜变量模型、主成分分析等都是聚类思想,将相关性大或距离小的样本分为一组,无特定的分类标准及分类数.此前使用聚类方法的研究所划分出的群体以3类和5类为主[8-13],受访者既呈现出积极和消极状态,又出现了多样性心理,如怀疑、不确定等.
一方面,对于使用意愿的很多研究中都考虑了感知收益[14-15],是在感知有用性基础上加入社会收益的拓展因素,但没有研究将两个变量分开,讨论感知收益间的关系.另一方面,中国的市场细分研究[16-17]使用Griffin公式[18],根据双极态度分类[19]将受访者分为积极组、消极组、摇摆组和冷漠组,均是对不同接受态度的受访者按标准进行特定群体划分,聚类分析研究不足,对不固定分类标准的群体划分考虑不全面.
为了探究聚类情况下的市场细分情况,分析使用意愿,本研究针对全自动驾驶汽车(SAE,L5)使用偏最小二乘法结构方程模型进行分析;根据人们对自动驾驶汽车的态度指标,使用引入隶属度概念的模糊C均值聚类算法和潜在剖面分析将受访者聚类,比较两种聚类方式划分出的群体差异;定义不同受访者群体并进行方差分析,识别群体特征,寻找对群体有作用的使用意愿影响因素,针对不同类型群体提出全自动驾驶汽车的发展策略.
1 数据收集及准备
针对未来潜在的全自动驾驶汽车用户,通过线上和线下方式进行了问卷调查.为了避免人们对自动驾驶了解不够而出现误解,增大误差,影响数据的真实性,问卷开始先给出了相关说明,即自动驾驶技术使车辆在无须驾驶员操作的情况下,通过车辆上布置的各类传感器,对周围环境进行感知并做出决策.自动驾驶等级分为6级(L0~L5),全自动驾驶(L5)为研究对象.全自动驾驶汽车可以在任何条件下自动驾驶,由驾驶系统负责所有的驾驶行为,完全不需要人为操作.通过介绍全自动驾驶汽车,希望人们在对自动驾驶汽车有一定了解的情况下回答问题,提高问卷的可信度.问卷共25题,分为两个部分:基本信息(7题)及使用自动驾驶汽车相关的心理测评量表(18题).基本信息包括性别、年龄、教育程度、是否有驾照、是否有车(是否带有驾驶辅助系统)、是否有事故经历.在分析中,是否有车和是否带有驾驶辅助系统合为一题统计.测量题项(item)使用五点李克特量表(5-point Likert scale)衡量,从十分反对到十分认同,依次记为1~5分.数据收集于2019年5月,调查最终共收集有效样本204个,受访者个体属性如表1所示,量表中构念(construct)及题项设计如表2所示.
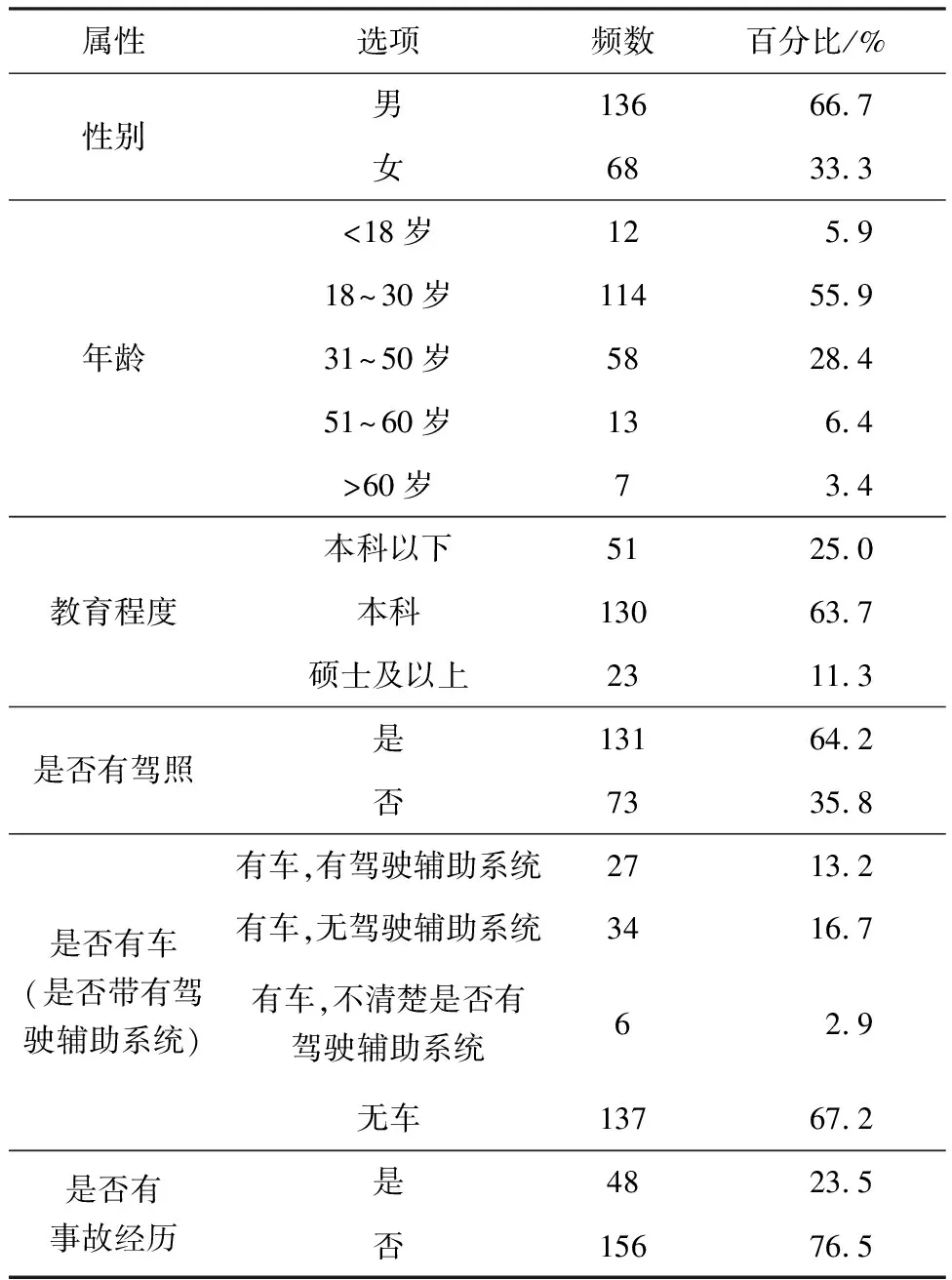
表1 个体属性统计表
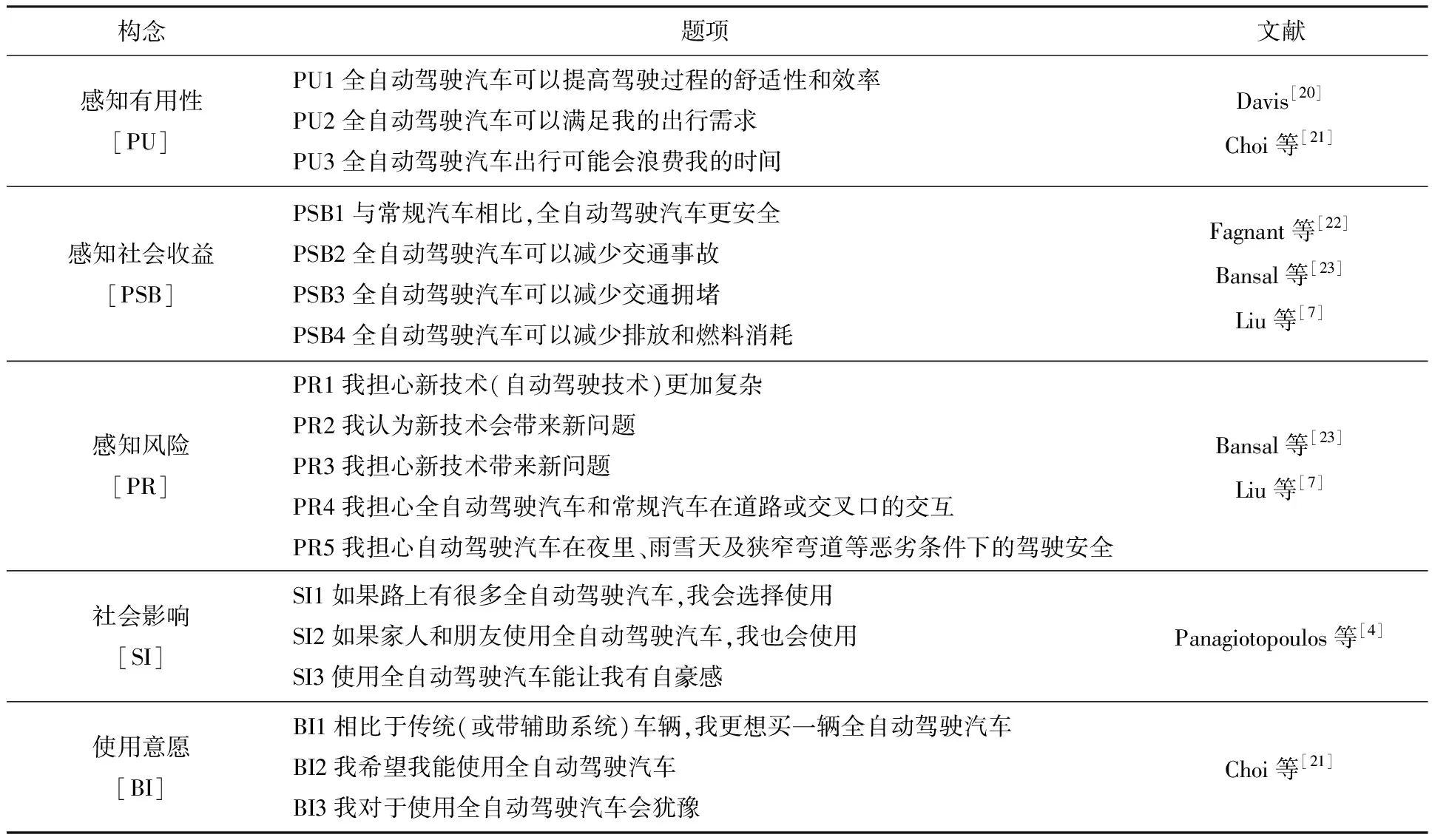
表2 构念及题项设计
题项包括感知有用性(perceived usefulness,PU)、感知社会收益(perceived social benefit,PSB)、感知风险(perceived risk,PR)、社会影响(social influence,SI)和使用意愿(behavioral intention,BI),PU3及BI3是反问题,在分析前先将其正向化.探索性因子分析结果显示,KMO(Kaiser-Meyer-Olkin)统计量为0.870,巴特利特球形度检验显著(p<0.001),可以使用因子分析.经验证性因子分析,删除因子荷载过小的题项PU3,剩余各题项的克隆巴赫α系数均大于0.700,组合信度(CR)大于0.700,平均变异抽取量(AVE)在0.500以上,结果如表3所示.
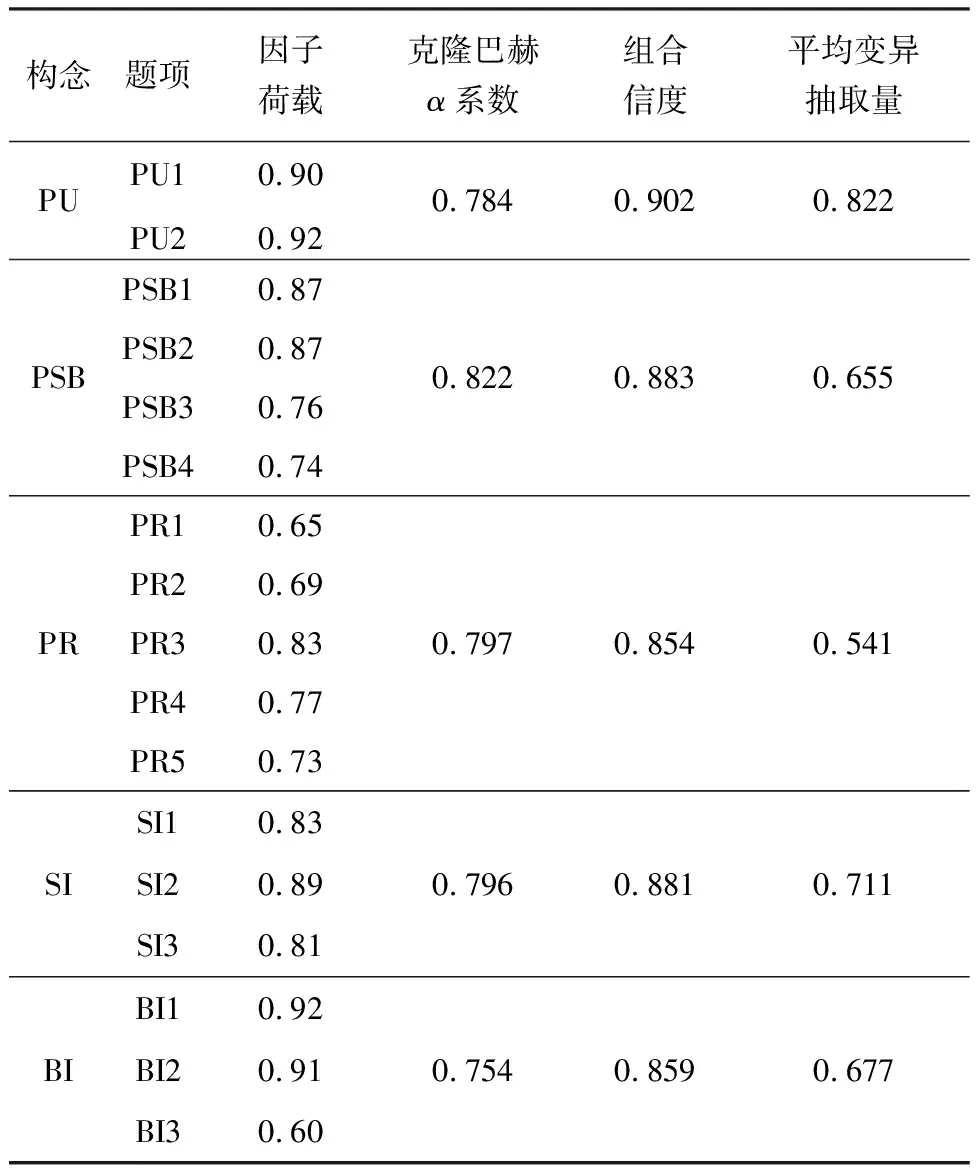
表3 问卷信效度分析
2 理论方法及模型框架
2.1 结构方程模型
态度等变量往往存在测量误差,且由多个指标共同反映,而结构方程模型可以允许测量误差的存在并假设自变量与多个因变量间的关系,因此本研究使用结构方程模型分析使用意愿及影响因素.潜变量选用PU、PSB、PR、SI、BI,潜变量间的假设关系如图1所示.
通常结构方程模型使用最大似然估计方法(ML),对样本量要求较大.而偏最小二乘法(PLS)估计结构方程适用于小样本模型,因此,本研究使用PLS-SEM分析方法.
2.2 模糊C均值聚类
k-means是一种常用的基于欧氏距离的聚类算法,它以数据点到聚类中心的某种距离作为优化的目标函数[24].但k-means聚类是一种硬聚类算法,每个样本点最终都会被划分到确定的类别中(属于该类别的概率为1或0).模糊C均值聚类算法融合了k-means聚类和模糊理论,用隶属度表示样本点属于某一簇的程度,相比于硬聚类算法更加灵活,其目标函数为
(1)
式中:uij为样本点xi属于j簇的隶属度,对于固定的i,样本点属于各簇的隶属度总和为1;m为模糊指数,当m过大,聚类效果变差,而m过小,则会趋于硬聚类算法;cj为j簇的簇中心.隶属度和簇中心不断迭代直至满足收敛条件.
2.3 潜在剖面分析
混合模型聚类同样是一种软聚类算法:根据样本间的成员概率而不是样本间距离进行聚类.这种基于模型的聚类方式得出的是样本点属于某一类别的概率,根据概率决定所属类别.潜在剖面模型的连续外显变量若呈正态分布(高斯分布),则其本质上即为高斯混合模型.它由许多正态分布函数加权叠加而成,可以表示出任意分布.在研究中,潜在剖面模型从连续的外显变量中获取类别潜变量,并对样本进行分类.假设连续的外显变量呈正态分布,其数学模型为[24-26]
(2)

本研究样本共有204个,属于小样本,使用偏最小二乘法结构方程模型(PLS-SEM),通过SmartPLS 软件对数据进行分析,各变量间的路径系数及检验结果如图2所示.
结果显示,感知有用性、感知社会收益和社会影响对使用意愿有积极影响,其中,社会影响的作用(β=0.37,p<0.01)大于个人感知社会收益(β=0.23,p<0.05),其次是感知有用性(β=0.19,p<0.10)和感知风险(β=-0.14,p<0.05).对于受访者而言,社会环境及亲友的行为可以促使人们使用这类车辆;同时,全自动驾驶汽车为交通系统整体带来的减少交通拥堵等效益也会对公众行为产生影响.感知社会收益对感知有用性表现出很强的积极影响(β=0.47,p<0.01).本研究中,社会影响作用显著,除了对使用意愿有直接影响外,受访者的亲友和所处的社会环境对感知社会收益也有积极影响(β=0.67,p<0.01).通过中介分析发现,社会影响不仅直接促进使用意愿,还会通过感知社会收益对使用意愿产生间接的显著作用.鼓励公众使用全自动驾驶汽车的政策除了提高感知收益(即感知有用性和感知社会收益)外,还可以从社会影响入手.
4 用户细分结果及分析
根据以往研究[16-17,27-28],将感知收益和感知风险作为判断态度的依据.本研究从感知收益和感知风险角度,对不同态度的群体进行分类.模糊C均值聚类算法和潜在剖面分析都需要提前确定最佳聚类数量.
4.1 模糊C均值聚类及潜在剖面分析结果
Xie-Beni指标能表现聚类有效性,通过比较Xie-Beni指标、划分系数及划分熵,确定聚类数为3.根据每个分类的题项得分,将3组群体分别命名为摇摆组(类别1,N=87)、消极组(类别2,N=88)和积极组(类别3,N=29)(图3),Me为题项得分的估计均值.通过观察各组得分发现,消极组的感知风险得分比感知收益高,但整体相差不大,感知风险没有处于较高水平(小于4.0).摇摆组在感知收益及感知风险方面的得分都较高(4.0~4.5),体现出对全自动驾驶汽车的矛盾态度.积极组认同全自动驾驶汽车的良好效益而忽视风险.
潜在剖面分析使用赤池信息准则(AIC)、贝叶斯信息准则(BIC)、样本量调整后BIC(aBIC)等多项指标衡量不同分类数下的聚类效果,AIC、BIC、aBIC及熵值越小,聚类效果越好.此外,有研究显示LMR检验(Lo-Mendell-Rubin adjusted LRT test,LMRT)不易受到外显指标数、样本量即指标相关性等影响[29],相比于AIC及BIC更加稳定,可以作为拟合指标.使用Mplus软件进行潜在剖面分析,分类数为2~5,结果如表4所示.
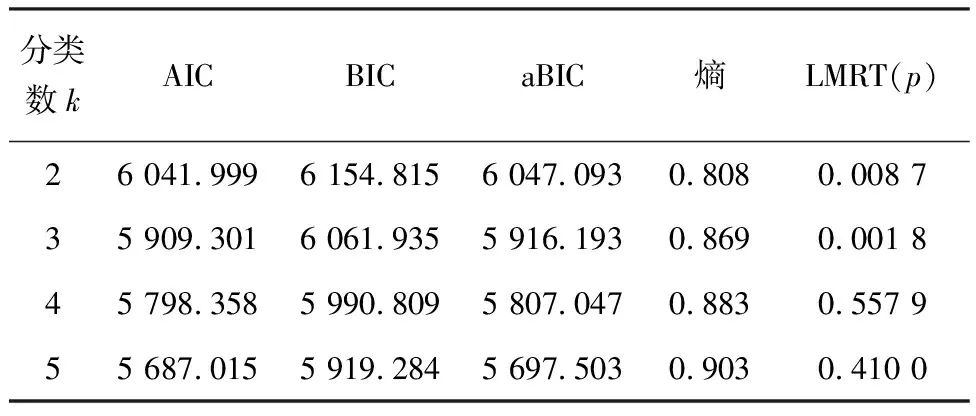
表4 潜在剖面分析模型拟合指标
从结果看出,k=2及k=3时,LMRT的p值显著(p<0.05),模型拟合有明显改善,从k=4开始,虽然AIC、BIC及aBIC等逐渐减小,但模型开始变得与k-1模型差别不显著.从k取2、3时的模型指标来看,分为3类比分为2类时的模型有了改善,于是选择将样本集合分为3类,命名为摇摆组(类别1,N=87)、消极组(类别2,N=94)和积极组(类别3,N=23)(图4).模糊C均值聚类和潜在剖面分析都将样本划分为3类,分类重合达到96%,两种方法分类大致相同,结果的不同之处在于模糊C均值聚类会将更多的受访者分为积极组,导致模糊C均值中积极组的某些感知收益得分比摇摆组要低,而潜在剖面分析的积极组感知收益得分整体比摇摆组高.
4.2 不同群体方差分析
对模糊C均值聚类和潜在剖面分析各组进行效应量计算(表5)和方差分析.结果显示,潜在剖面分析所划分的群体间存在更多的显著性差异,是否有驾照、社会影响(SI1-3)和使用意愿(BI1-3)表现出一定程度的影响.相比之下,模糊C均值聚类结果显著因素少,且效应量小,于是选择潜在剖面分析结果进行后续分析.
潜在剖面分析的方差分析(ANOVA)结果显示(表6),不同群体间的教育程度(p=0.076)和是否有驾照(p=0.007)差异呈现显著性.在教育程度和是否有驾照方面,积极组表现出了与另外两组的显著性差异.教育程度最高的群体是摇摆组(M=1.92,DS=0.55),其次是消极组(M=1.87,DS=0.59)和积极组(M=1.61,DS=0.66).与消极组和摇摆组不同,积极组大部分受访者没有驾照(65.2%).在社会影响和使用意愿上,消极组与另外两组差异显著(p<0.01).摇摆组和积极组易受到社会影响且使用意愿较高,而消极组最低.
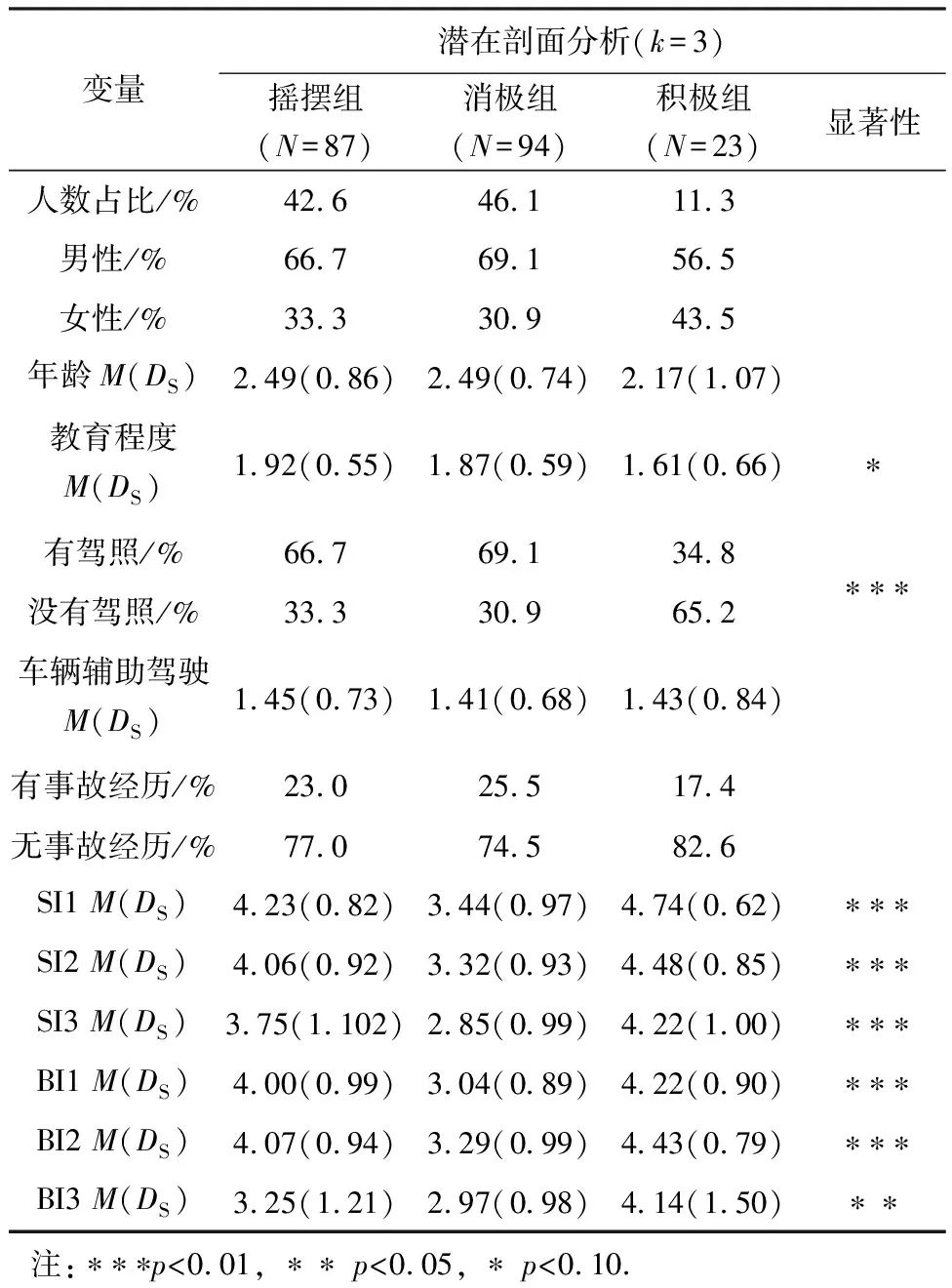
表6 不同群体的属性及变量分布
4.3 结果分析及启示
研究选用潜在剖面分析将样本分为积极组、摇摆组和消极组,大部分人(88.7%)对全自动驾驶汽车持有矛盾心理或消极态度,这与Nielsen等[9,12]的研究成果相似.在全自动驾驶汽车没解决技术上的问题时,大部分受访者对全自动驾驶汽车仍处于观望状态.
消极组(46.1%)对感知收益认同较低,对风险有些担忧但不强烈,整体上认为全自动驾驶汽车的风险大于收益.该群体中有驾照、无车的男性较多,74.5%的人没有事故经历,不会受到亲友影响,对使用全自动驾驶汽车保持中立态度.摇摆组(42.6%)与消极组的受访者数相当,组成个体的社会经济属性相似,教育程度高.其对感知收益和感知风险的认同较高,易受环境影响,希望尝试使用全自动驾驶汽车.积极组占样本量的11.3%,受访者更加年轻[9],教育程度较低,大部分人没有驾照(65.2%),有更少的事故经历.积极组可能因无法驾驶汽车或对驾驶汽车没有兴趣,更容易接受全自动驾驶汽车;且事故经历更少,对风险的担忧并不强烈.此外,他们容易受到环境影响,并对使用全自动驾驶汽车抱有热情.积极组可能成为全自动驾驶汽车的早期使用者,而消极组更有可能是全自动驾驶汽车的滞后使用者.
积极组虽然占比不高,但对感知收益得分较高,在强烈认同全自动驾驶汽车优势的情况下,其心理态度较为稳定[30].摇摆组对风险的担忧水平超过消极组,且感知收益与感知风险得分较为持平,积极和消极的态度会导致摇摆组的稳定性较弱,易受社会影响,倾向于被外界信息所改变[28,31].根据对受访者的分组提出了以下措施:
(1)完善全自动驾驶汽车各类标准和规定.从制造角度上降低风险,在法律方面明确责任划分,降低消费者顾虑.
(2)定位消费者.早期用户定位为无驾照、持积极态度的人群,争取摇摆组用户.对于摇摆组用户,针对其心理状态不稳定的特点,应积极宣传全自动驾驶汽车的最新技术和潜在效益,打消他们的使用顾虑以提高感知收益,降低感知风险,促使该群体转变.此外,可以增加公共交通中全自动驾驶汽车的占有率,如在小范围内设立固定线路的无人公交,增加乘坐体验,以增加公众对全自动驾驶汽车的了解和感知有用性,使未来人们在购买汽车时更多地考虑全自动驾驶汽车.同时,摇摆组和积极组都是易受周围人及环境影响的群体,增加全自动驾驶汽车占有率及亲友的使用率可以确保积极组的使用率,并带动摇摆组使用此类车辆.消极组考虑在全自动驾驶汽车得到一定程度普及后,发生态度上的转变进而使用全自动驾驶汽车.汽车厂家可增加试驾活动并鼓励分享使用感受,带动态度转变.
(3)在未来建设方面,考虑建设全自动驾驶汽车专用道、智能网联汽车与基础设施互联规划最佳路线等,通过提高个人和社会的收益来提高公众群体的感知,以促使更多用户使用.
5 结 论
(1)感知收益内部存在显著影响关系,感知社会收益对感知有用性有积极影响.感知风险对使用意愿有消极影响.社会影响是影响不同群体使用意愿的关键因素,可以通过直接和间接的方式影响使用意愿.
(2)聚类算法将受访者确定为消极组、摇摆组和积极组3类.不同组间,教育程度、是否有驾照、社会影响和使用意愿的差异显著.摇摆组和消极组占样本的88.7%,这两类受访者的教育程度较高且持有驾照;摇摆组和积极组更易受外界社会影响且愿意尝试使用全自动驾驶汽车,可以结合聚类后组内的样本特征,采取措施使摇摆组的态度发生转变.
(3)从3个方面提出措施:制定标准和各类法律法规;定位消费者且根据不同群体特征采取不同的针对性措施;计划未来全自动驾驶汽车的管理方法,整体通过提高感知收益和同伴感染力并降低感知风险的方式推动公众选择全自动驾驶汽车.
本文虽然取得了上述初步研究成果,但由于本研究收集的样本量较小,且大部分样本来源于网络调查,教育程度较高的年轻人居多,研究成果还有待今后利用大样本数据进行验证.
