AI机器人摇臂在全媒体交互式演播室的应用
2022-10-08何金道
何金道
(浙江省广播电视工程公司,浙江 杭州 310015)
0 引 言
当前,随着媒体融合向纵深发展,传统电视演播室已向全媒体多景区交互式高清演播室演进。全媒体演播室节目的画面拍摄,除了传统电视节目制作中常见的坐播、站播、走播以及访谈等主持人播报形态之外,还需要能实现新媒体传播需求催生的竖屏点评、外景连线、虚实结合、交互与沉浸等多种形式的融媒体节目制作[1]。因此,摄像机机位大都是多机位的三维运动状态与静态结合的拍摄。通常情况下,大型摇臂和可伸缩摇臂需要双人操作才能完成,为了拍摄出符合艺术审美要求的画面,既要求摄像师具有较高的摄像机操控技术以完成高质量的连续画面拍摄,又要求摇臂操作者能娴熟掌握摇臂操作技能,以确保摇臂在演播室这一特殊的封闭环境内运动时平滑、顺畅无迟滞,并确保不与灯光、显示屏、主播桌等设备设施发生碰撞,以保证拍摄安全。
为此,丽水市广播电视总台(以下简称丽水台)对原建于2008年的两个140 m2新闻演播室和两个100 m2虚拟演播室进行全媒体交互式高清演播室群技术改造时,在140 m2演播室引入了人工智能(Artificial Intelligence,AI)机器人摇臂摄像系统,以AI识别技术赋能自动化机器人摇臂的解决方案,代替传统的摄像师人工拍摄。
1 系统拍摄模式
AI机器人摇臂系统可按预设运动轨迹动作,可以对走动的主持人进行自动、实时追踪,还可以对空间中静止的物体如播报台、屏幕以及虚拟画面物体进行定点跟踪,以完成节目需要的画面录制。
与传统的手摇电控摇臂相比,AI机器人摇臂在减少人力投入的同时使演播室拍摄动态画面的智能化水平得到大幅提升,并降低了操作上的难度和人为因素带来的不稳定性,使节目的录制效率和质量得到大幅提升。考虑到演播室多景区、多功能的拍摄要求,不仅要求摄像摇臂在制作节目时要便捷地实现自动化和无人化,还要兼顾安全性和稳定性。经过多方面的对比,丽水台140 m2全媒体演播室最终选择了一款承托重量为25 kg的中小型AI机器人摇臂。实物如图1所示。

图1 AI机器人摇臂实物图
该机器人摇臂可在录制现场无人的情况下,远程对节目进行精准稳定的录制,并提供精确稳定的跟踪数据用于VR/AR/XR等虚拟场景,可广泛用于新闻、访谈、会议、时事等类型节目。机器人摇臂配备触屏及物理按键组合式工控,可远程对臂身、云台、镜头、速度进行控制及预设轨迹,而且各种操作均使用物理按键,反馈直接;可设置8档节目,各节目设20个机位存储点,把臂身、云台及镜头的位置存在相应的存储点后,对多点轨迹可形成单点运动、单次连续运动及循环连续曲线运动三种摇移模式。操纵杆顶键的极低速微调功能,方便在存储轨迹时对画面进行精准卡边。摇臂支持远程遥控拍摄模式、程序化自动拍摄模式以及传统手动摇臂拍摄等三种模式。
1.1 远程遥控拍摄模式
通过手摇左右摇杆远程控制臂身和云台的水平、俯仰及镜头的运动。在任意时间切换为手动模式时,只需拨动切换按钮,即可切换至手动状态。远程遥控模式可以根据节目临时安排,提供不同角度的摄像效果,展现不同的节目主题。
1.2 程序自动拍摄模式
可通过操作面板进行简单编程,根据节目需要预设和存储拍摄位置使设备进入程序化的自动拍摄过程。摇臂可在程序化运动控制下进行自动摇移、镜头变焦聚焦及固定轨迹的精准重复,实现演播室录制的无人化。在多点运动过程中,可选择连续摇移多轨迹单次运动或连续不间断的轨迹运动,可实时向导播提供所需要的画面素材。程序自动拍摄模式既可以节约人力,降低摄像人员的重复劳动,又可以使画面更加顺畅、更具动感。
1.3 传统手动摇臂拍摄模式
系统配置了手动操控系统,提供了控制手柄、触屏电控盒以及安装在摇臂尾端的双监视器。使用传统手动拍摄模式时,打开臂身水平及俯仰锁止结构,摄像师即可通过手柄对云台、镜头进行控制,通过摇移操作拍出自己风格的运动轨迹。这套操控系统还附带几个智能拍摄功能,可降低摄像师的操作要求,让初学者也能摇出炫酷的画面。
2 关键技术应用
为了使机器人摇臂能满足全媒体演播室的拍摄需求,系统引入了最为关健的AI追踪技术,通过该技术与摇臂的自动化动态画面录制技术相结合,实现了AI机器人摇臂的各项功能。
2.1 AI追踪
机器人摇臂在云台处EFP摄像机下方安装了智能摄像头及算法系统的一体模块。该摄像头可以获取目标人体的肢体特征,并识别目标人物在空间中的相对角度和位置坐标。当人体在离镜头较远位置时,系统开启人体外形特征识别并锁定,确保人体的肢体都涵盖在运动画面的中间位置,有效规避了基于红外射线识别技术的信号中断问题以及一定距离时无法有效进行人脸识别的问题。其原理如图2所示。

图2 人体特征识别模式
当目标人物靠近摄像头时,系统即转为人脸位置识别模式,追踪的摄像机镜头立刻对主持人的面部进行跟踪拍摄。该识别系统可使摇臂机器人精准识别目标人物,应用于多人物场景拍摄。目标主持人在做转身、侧身、下蹲等动作时,摇臂机器人也可进行平滑流畅的追踪。
该功能应用在主持人播报录制过程中时,主持人可任意行走、转体。上述AI技术将使主持人在进行新闻类播报时不受脚本的严格限制[2]。这不仅提升了主持人发挥的空间和节目创作的自由度,还降低了对摄像师技能的高要求,播报效率也大幅提高。
2.2 自动化动态画面录制
2.2.1 摇臂编码器
编码器是将数据进行编制,转换为可通信、传输和存储的信号形式的设备。机器人摇臂内置多种高精度编码器以获取对系统的控制数据、位置数据,通过汇编形成多种用于拍摄虚拟跟踪画面的数据。它既可检测角度位移,又可在机械转换装置的帮助下检测直线位移。多圈光电编码器可以检测相当长量程的直线位移[3]。
通过将摇臂机器人臂身和云台的水平、俯仰数据与摄像机镜头传感器的数据整合并与同步信号锁定,可以实时发送摇臂各运动轴数据。利用这些运动轴数据,结合摇臂机器人本身所确定的物理参数,可以通过函数关系精确测算所拍摄物体位于空间中的相对位置,通过对云台进行实时的角度控制就可以获取所需的画面构图。与此同时,通过程序软件算法与此类数据的整合,以标准数据接口协议传送给虚拟图像服务器,可以最终实现虚拟画面与摄像机空间位置及镜头状态的完美结合。
2.2.2 空间定位跟踪
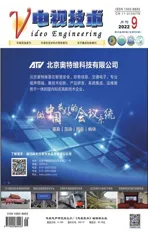
以摇臂臂身水平旋转轴和俯仰旋转轴的交点OXYZ建立空间直角坐标系,臂身长度a和云台吊臂长度b为已知量。系统输入臂身的水平、俯仰角和云台的水平、俯仰角4个变量,可输出摄像机位置坐标x,y,z,摄像机旋转角度pancamera、tiltcamera和rollcamera等6个结果。以两轴旋转云台为例,摄像机翻滚数值rollcamera=0;摄像机水平角度为臂身水平和云台水平的累加,pancamera=panarm+panhead。云台可以保持垂直地面状态,与臂身的俯仰角度无关,所以云台俯仰角度为tiltcamera=tilthead。摇臂坐标系统如图3所示。
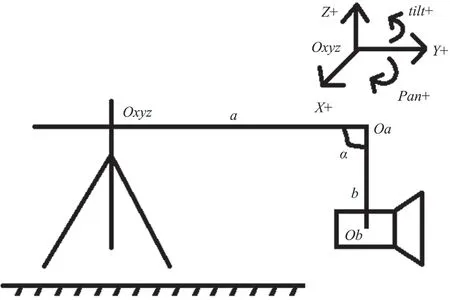
图3 摇臂坐标系统
以四元数进行计算,以Oa为原点建立坐标系,Ob点坐标为(0,0,-b),将Ob点扩充至四元数,即pob=0+0×i+0×j+(-b)×k。摇臂做俯仰运动时,云台可以实时保持垂直与地面,即图中角α=tiltarm,摄像机以(1,0,0)为旋转轴转动α,以四元数形式 表 示 为qoa=cos(α/2)+i(1×sinα/2)+j(0×sinα/2)+k(0×sinα/2),则旋转后的摄像机坐标四元数为pcamera=qoa×qob×qoa-1,即可求得摄像机相对于坐标原点Oxyz的位置和角度关系,如图4所示。
图4 臂身空间定位跟踪视角
3 安全性设计
考虑到AI机器人摇臂需要在封闭的演播室内进行大幅度的三维运动这一特殊应用场景,演播室内专业灯光、LED显示屏、播音台、多机位摄像机等密布,节目制作的首要任务是确保摇臂自动拍摄时的运动安全,不能与室内其他物体和主持人等发生哪怕是轻微的碰撞。因此,机器人摇臂在多个环节进行了针对性的安全设计。
首先,系统可以在手动和自动模式间进行实时切换。该设计确保系统既可以在预设轨迹模式下稳定运行,又可以在制作安全性要求特别高的特殊节目时,直接打开臂身锁,从自动模式切换到传统摇臂的手动拍摄模式[4]。其次,为了避免摇臂在自动拍摄时碰撞到其他物体,系统可以根据所处演播室的具体环境,在臂身和云台所有旋转轴位提前预设限位角度,以确保所有预设轨迹均在安全空间范围内。此外,摇臂系统还内置了力矩感应检测装置,确保摇臂一旦在运动中发生外力影响即可实时检测到异常,在最短时间内停止摇臂运动,确保不发生意外事故[5]。
为了达到上述设计目的,在硬件方面,系统以高精度编码器定位配合精密减速机的应用,确保定位精度达到1 mm以内。在软件方面,采用S型曲线进行加速和减速软件控制,相对于梯形加减速而言,可以获得更好的控制性能,从而确保摇臂运动的安全可控。
4 遇到的问题和解决办法
在与虚拟引擎对接的过程中,摇臂执行预设轨迹拍摄时出现画面卡顿现象,初步判断是虚拟植入引擎的刷新率的问题。经反复验证,却发现没进虚拟引擎的画面就有卡顿的问题,因此推测是摇臂系统本身的问题。首先检查电源相序、同步信号,均为正常;再执行臂身和云台轨迹,同样正常;但执行轨迹有镜头变焦时就会出现卡顿的现象,而且换镜头无效。于是定位故障应该在镜头和摇臂之间的通信。将问题反馈给厂家,厂家通过复现故障后分析得出是镜头内编码器数据传输受外界干扰所致。考虑到全媒体演播室内各种电子、电气设备品种和数量繁多,可能存在未知信号干扰源,于是在镜头和摇臂传输链路增强屏蔽。后经多次测试,卡顿现象均未再现,顺利解决了问题。
5 结 语
演播室AI机器人摇臂拍摄简化了传统拍摄流程,减少了人、财、物的投入并提高了工作效率,还能增强电视画面的艺术美感,为观众带来视觉冲击和视觉享受,成为媒体融合发展背景下颇受欢迎的摄像机承托解决方案。当前,AI摇臂拍摄依旧存在智能程度不够高等局限性,但随着科技的发展,AI机器人摇臂拍摄技术一定会得到进一步发展,从而更好地助力电视媒体的融合发展。