仿真测试在智能网联汽车准入测试的政策应用与技术基础分析*
2022-10-08曾杰谭龙丁雪聪胡雄廖伟李慎言
曾杰 谭龙 丁雪聪 胡雄 廖伟 李慎言
(1.国家智能网联汽车质量检验检测中心,重庆 401122;2.招商局检测车辆技术研究院有限公司,重庆 401122)
主题词:智能网联智能驾驶仿真测试测试标准
1 前言
工业和信息化部、公安部、交通运输部联合印发《智能网联汽车道路测试管理规范(试行)》(以下简称《规范》),要求智能网联汽车在申请上公开道路测试之前,需第3方检测机构进行封闭道路、封闭场地测试。智能网联汽车最重要的技术之一为自动驾驶技术,具备自动驾驶功能的智能网联汽车的安全性一直受到社会广泛关注。根据相关研究机构对自动驾驶汽车系统安全性验证的要求,被测自动驾驶车辆需要进行170亿英里测试,测试效率与成本挑战巨大。自动驾驶系统仿真测试技术,通过场景重构、传感器信号仿真等方式,可有效评估自动驾驶系统的安全性。仿真测试技术的应用贯穿智能网联汽车的研发全过程,在开发验证阶段,可通过软件在环(Software In the Loop,SIL)、硬件在环(Hardware In the Loop,HIL)、整车在环(Vehicle In the Loop,VIL)等仿真测试工具链对各项功能进行快速验证。在测试评价阶段,则需要利用仿真测试对自动驾驶汽车不同维度、不同方面的性能进行评价;在检测认证阶段,利用仿真的测试考察自动驾驶汽车在各种交通行为下的功能安全性、可靠性。因此,要求仿真测试结果具有较高的置信度、重复性、一致性。
本文首先解读《智能网联汽车生产企业及产品准入管理指南(试行)(征求意见稿)》的核心内容,然后对比仿真测试与场地测试的特点,最后介绍分析仿真测试技术的测试评价体系建设情况,为自动驾驶系统的研发工作提供参考。
2 仿真测试行业应用政策分析
《智能网联汽车生产企业及产品准入管理指南(试行)(征求意见稿)》简称《指南》,明确了智能网联汽车产品准入在测试与评价方面需要进行的各项认证要求,并提出了智能网联汽车的自动驾驶系统功能需满足“3支柱法”的测试要求,即仿真测试、封闭场地测试和实际道路测试。同时,《指南》对驾驶自动化系统模拟仿真测试提出了7点要求。包括以下5个方面:(1)产品原理及参数、(2)场景要素及其组合、(3)场景安全性及道路交规符合性、(4)仿真测试有效性、(5)测试结果可追溯性,涵盖了不同层级仿真测试所涉及的关键点。由此可见,仿真测试方法将是智能网联汽车产品准入测试中不可或缺的的测试方法。
3 政策分析
《指南》明确了功能安全和预期功能安全在自动驾驶系统开发过程中的要求,而智能网联汽车的预期功能安全问题,已经是自动驾驶汽车大规模商业落地应用的最大难题之一。基于封闭测试场地和实际道路测试方法,难以测试自动驾驶系统在功能故障时的人机接管能力和超出系统运行能力范围边界时的性能表现。例如,实车在紧急制动功能启动情况下的故障(制动、转向、传感等)注入测试,测试驾驶员接管及时性、接管能力、车辆安全策略等,实车测试将会十分危险。在传统汽车测试领域中,汽车安全性能测试主要以实车测试为主。《指南》充分利用仿真测试技术的特点,将仿真测试应用于自动驾驶系统功能测试,对提升自动驾驶系统功能安全和预期功能安全,具有重要意义。
仿真测试方法在智能网联汽车的自动驾驶系统功能验证方面,具有突出的优势。若将仿真测试与封闭场地测试和公共道路测试合理应用于自动驾驶系统安全性验证,并形成合理的测试评价规程,对于自动驾驶汽车商业化落地具有推动作用。
4 实车测试与仿真测试对比
自动驾驶汽车的实车测试方法分为封闭场地测试和实际道路测试。仿真测试方法较为丰富,对应用不同的系统层级,应用例如软件在环(Software In the Loop,SIL)、硬件在环(Hardware In the Loop,HIL)、车辆在环(Vehicle In the Loop,VIL)等测试评价手段。
4.1 封闭场地测试
传统的封闭场地测试方法,是以有限的场景模拟为基础,结合车-车实时同步控制机器人达到场景预设置的触发条件,测试车辆的紧急制动、跟车巡航、主动变道等功能。结合雨雾模拟、隧道、路灯等设施模拟环境条件,测试车辆在不同环境条件下的环境感知能力的鲁棒性。主要的缺点在于:
(1)测试场景覆盖度不足;
(2)道路交通元素较少,场景复杂度不够;
(3)测试成本较高、效率低;
(4)实现极端危险工况测试和故障注入测试的危险性较高。
4.2 实际道路测试
实际道路测试的方法,由于被测车辆处于真实的交通流环境中,测试具有最高的置信度,并且可以进行连续复杂场景的测试。公开道路测试存在以下4大问题:
(1)测试效率低。效率低主要体现在测试里程数要求巨大,以及极端、边界的场景出现概率较低。
(2)场景覆盖度问题。新建成的道路里程数量每日增加,同时每时每刻在世界上都会随机发生新类型的场景。
(3)危险程度高。在自动驾驶系统在现有的设计运行域范围内,若功能不够成熟就进行大规模路试,将会对公开道路安全带来巨大挑战。
(4)可复现性差。在道路上实际运行过程中误触发系统功能和超出设计运行域范围边界的场景难以复现。
4.3 仿真测试
仿真测试在自动驾驶汽车测试方面主要有以下3大优点:
(1)高场景覆盖度。可通过复现实车采集场景案例、复现事故案例、应用场景设计、场景衍生理论等方法,提高测试场景覆盖度。
(2)高重复性。针对同一场景的测试,得益于虚拟仿真场景具有高度可控性,仿真测试得到的测试结果一致性较高。
(3)高效率。通过自动化的测试工具,自动化执行测试场景库中的测试案例,并输出测试结果。
仿真测试技术主要存在以下2个方面问题:
(1)置信度问题。仿真测试结果可靠性主要取决于虚拟测试场景复现的真实性,传感器模型或物理信号模拟的一致性,由于模型精度、场景或信号逼真度等问题,对测试结果置信度影响较大。
(2)测试平台复杂性。HIL与VIL测试方法,需要嵌入大量的传感器至仿真回路,使用半实物仿真的方法,传感器模拟器的数量、成本将会急剧上升,提升了多系统闭环仿真的平台复杂度。
仿真测试和实车测试方法都具有各自优势与局限性,但仿真测试方法在自动驾驶系统升级后的安全性快速验证方面,具有测试效率高、测试成本低、测试安全性高等优势,这些优势对于自动驾驶系统“敏捷”开发具有推动作用。
5 仿真测试评价体系现状
5.1 测试评价方法
自动驾驶仿真测试“V”型流程如图1所示,模型在环(Mocle In the Loop,MIL)、SIL、处理器在环(Processer In the Loop,PIL)测试方法多应用于系统前期开发过程中,快速功能逻辑的测试与评价,具备系统自主开发能力的零部件供应商、主机厂,都应具备了相应的测试评价手段,以实现快速测试评价的目标。
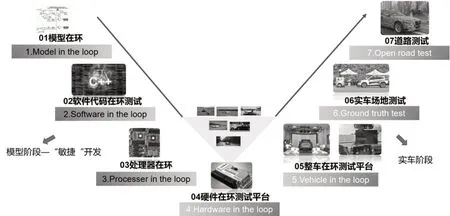
图1 自动驾驶仿真测试“V”型流程
目前,大多数汽车研发与检测认证机构已经搭建有相应的HIL平台,且检测机构搭建HIL平台时,都已提高了平台的仿真资源数量和兼容性。VIL车辆在环仿真的方法,主要有以下2种实现方式:
方法1:利用测功机系统模拟车辆的纵向行驶阻力,转向模拟器模拟车辆转向阻力。通过场景软件、动力学软件构建传感器模型,并输出对应信号支撑车辆系统运行,典型的室内VIL测试平台如图2所示。该方法需要被测车辆的车身系统、底盘制动系统、智能驾驶系统开放较多的接口与协议,存在一定的技术难度。

图2 典型的VIL测试平台
方法2:搭载智能驾驶系统的实车运行于空旷的测试场地,场景软件构建危险场景并计算传感器数据,通过总线注入法将传感器数据至被测车辆系统接口,触发车辆的智能驾驶系统功能(图3)。该方法需要对应传感器、总线接口协议支持,但车辆处于真实运动,仿真复杂性降低。

图3 典型的试验场VIL测试平台
根据文献[11],基于转毂的VIL测试方法,中汽中心、招商车研已经建立。基于场地的VIL测试方法,中汽中心、招商车研、中汽院等已经建立能力,国外的机构如IDIADA已经公开宣传基于场地的VIL测试方法。
5.2 测试标准研究现状
2020年11月,全国汽车标准化委员会发布了《自动驾驶功能仿真测试标准化需求研究报告》,该报告全面梳理了仿真测试评价目前的技术发展现状、各个检测机构的平台能力、各个测试方法的局限性等,为标准化工作启动提供依据。
在研的仿真测试评价标准有:
(1)GB/T XXX《智能网联汽车自动驾驶功能仿真试验方法及要求》,主要的测试场景与《智能网联汽车自动驾驶功能场地试验方法及要求》相对应,被测对象的功能为自动驾驶系统。
(2)TITS 0155—2021《营运车辆自动紧急制动系统仿真测试与评价方法》。
5.3 测试场景库
场景库建设需要依托于标准化的场景格式,以统一构成测试场景的元素类型、数量等。标准化的场景格式,对于各个软件之间的数据交互用,以及形成统一的测试评价标准具有重要作用。
5.3.1 场景格式标准化
目前行业公认的测试场景有3项标准格式,即描述路网文件格式的OPENdrive,描述动态场景事件的OPENscenarios格式,和描述路面物理信息与静态道路场景的交互的OpenCRG格式。OpenX系列的场景描述标准化格式,由德国自动化及测量系统标准协会(ASAM)提出,德国联邦经济与能源部(BMWi)启动PEGASUS项目,旨在开发一套自动驾驶功能测试程序,以促进自动驾驶技术的快速落地。中汽数据中心加入了ASAM联盟,组建C-ASAM工作组,后续百度、上汽等单位也加入了C-ASAM工作组,仿真场景格式标准化的工作得到进一步推进和完善。
5.3.2 场景库现状
目前,国内多家企业及科研机构,包括中汽数据有限公司、中国汽车工程研究院股份有限公司、腾讯、百度等,都在大力完善较为系统的仿真场景库。
(1)中汽数据有限公司
中汽数据基于大量实测场景数据,建设了“智能网联汽车驾驶场景数据库”。智能网联汽车驾驶场景数据库包括6个部分:自然驾驶场景库(1228种)、V2X场景库、危险事故场景库(206种)、中国特色交通法规场景库(82种)、功能安全场景库(110种)和预期功能安全场景库(70种)。
(2)中国汽车工程研究院股份有限公司
2020年12月,“中国典型场景库”在V2.0版本的基础上升级到V3.0,新增了典型事故场景、自动驾驶事故场景和预期功能安全场景3大板块,涵盖总计20余项自动驾驶功能。已累计完成1000余例NAIS真实中国道路事故数据的转换,涵盖车-车、车-人、车-二轮车等,形成了初具规模的事故场景库,并已生成总量大于10万例的OpenX标准格式场景文。
(3)百度
目前,百度自建设场景库典型场景数量已达到200种左右,涵盖不同的道路类型、障碍物类型、道路规划、红绿灯信号测试场景数据。来源于自然驾驶路采数据、交通数据库、人工经验等。
百度自建场景库目前总共生成220个Worldsim场景和17个Logsim场景。
(4)腾讯
TAD Sim是腾讯研究建设的自动驾驶虚拟仿真平台,TAD Sim数据集涵盖车辆避撞能力、交通合规性、行为能力、视距影响下交叉路口车辆冲突避免、碰撞预警、紧急制动、危险变道、无信号交叉口通行、行人横穿等方面。目前场景库包括1 000种场景类型,可以泛化生成万倍以上规模的丰富场景。
(5)预期功能安全测试场景库
由中国预期功能安全工作组牵头搭建的预期功能安全测试场景库,有近10家单位参与场景库的构建,包括第3方检测机构、主机厂、高校等,分别收集5大地域的特色预期功能安全场景,包括北京、上海、长春、重庆、成都、苏州、广州等城市。工作组建立了场景库编辑录入数据库平台,可生成OpenX系列的测试场景格式。目前,预期功能安全测试场景库已累计收集800余例典型预期功能安全场景,测试用例生成工作也在稳步推进当中。
行业已经在仿真测试评价方法、测试场景库、评价标准方面进行了相应的研究与应用实践,为仿真测试技术应用于智能网联汽车产品准入测试提供了技术与应用基础。对比多种仿真测试方法,VIL测试方法作为产品准入测试应用的可行性最大,主要有以下3点因素:
(1)VIL测试属于整车级测试,测试结果的置信度较高。
(2)基于VIL测试平台,可以测试预期功能安全和功能安全问题发生时,驾驶员真实应对能力。
(3)VIL测试平台,需要被测对向开放的协议更少,有利于第3方检测机构执行具体测试。
6 总结与展望
目前,智能驾驶系统仿真测试技术发展较为迅速,针对不同系统开发阶段的测试评价需求,各个主机厂和检测机构都搭建了相应的仿真测试平台,形成了较好的仿真测试技术应用基础。目前,还需要在以下2方面加快进度:
(1)仿真测试评价体系中最重要的标准法规制定有一定难度,例如针对测试评价工具的标准化、被测对象接口标准化等。
(2)仿真测试场景库的完善,非一个企业、一个机构单独能够完成,需要集合行业优势资源,不断扩充场景库的体量。
