一种决策级数据融合机载LiDAR点云的车辆提取方法
2022-10-02刘正坤蔡文婷李卫军
刘正坤,蔡文婷,李卫军
(1.广州中科智云科技有限公司,广东 广州 510660;2.南方电网数字电网研究院有限公司,广东 广州 510660;3.中国能源建设集团广东省电力设计研究院有限公司,广东 广州 510663)
车辆监测是智能交通管理系统的前提和基础,现有方法主要包括线圈监测、微波监测、超声波监测和视频监测等,但这些方法均受布设地域的限制,只能用于主干道交通监控,难以做到大范围全覆盖。高分辨率遥感技术的发展使得细小地物提取与识别、大范围动态监测成为可能,逐渐成为车辆监测研究新的热点。国际摄影测量与遥感学会(ISPRS)于2002年召开了“交通遥感专题”会议,并于2006年出版了“航空与航天交通监测”专刊[1],对基于遥感影像的车辆提取和交通参数估计等方面的研究成果进行了总结。然而,可见光遥感只能在白天使用,且易受云、雾等环境影响,难以实现全天候机动监测。机载激光雷达(LiDAR)技术能快速获取大范围地表三维空间坐标数据,目前已提出了多种机载LiDAR车辆提取方法。Toth C K[2]等首先对点云进行分割,再利用主成分分析方法识别,将LiDAR数据与航空影像相结合,实现了车辆监测和车辆速度估计,但该系统仅在高速公路上进行了测试,对于城市环境的适应性还有待进一步研究。YAO W[3-4]等提出了基于网格单元的车辆提取方法和基于三维目标点云分析的车辆提取方法,并对这两种方法进行了比较[5],前者通过分析车辆与建筑物、树木、道路、空旷地之间的相互关系,采用地面分割、缺失数据插值、车辆顶部检测与选择、车辆分割4个步骤实现了车辆提取;后者直接从散乱点云中提取目标,避免了插值引入的信息损失,主要包括均值飘移分割和基于目标特征分类两个步骤。对比实验表明,基于三维目标点云分析的车辆提取方法具有更高的精度,且对运动状态和速度信息的提取更加稳健;而基于网格单元的车辆提取方法更适用于静止车辆的提取。刘珠妹[6]等提出了一种航空影像辅助下的城区车辆检测方法,首先利用形态学滤波实现地面与地物的分类,再通过归一化植被指数(NDVI)特征去掉植被点,最后根据高程信息和形状特征实现车辆提取。该方法需要影像数据辅助提取,因此限制了其适用性。
机载LiDAR作业过程中存在数据丢失的现象,主要包括3个方面的原因:①航带间的重叠度太小,飞行平台较大的姿态变化将导致航带间的数据缺失;②仪器设备自身功能缺陷或工作不稳定等;③由于地面目标的镜面反射或强吸收,导致激光信号无法返回激光探测单元。前两种原因可通过精确的航线规划、仪器操作和改进仪器性能等措施加以避免[7],但物体表面特征对扫描信号的影响难以彻底消除,如水体吸收使得激光点密度大幅减小,回波强度减弱[8]。对于大多数车辆而言,表面较光滑,激光信号易产生镜面反射而导致车辆点云缺失。常规的形状匹配方法难以实现数据缺失条件下的车辆提取,因此本文提出了一种基于地物聚类和地面空白区搜索的车辆联合提取方法。
1 车辆提取的主要流程
针对数据缺失条件下的车辆提取问题,本文提出的方法主要包括数据预处理和联合提取两大步骤:①数据预处理,首先采用渐进形态学滤波方法将原始LiDAR数据分类为地物点和地面点,然后分别对地物点和地面点进行聚类和遮挡区搜索,为联合车辆提取提供两类待分类目标;②联合提取,首先利用单类支持向量机对聚类和搜索结果进行分类,提取属于车辆的点云聚类以及由于车辆遮挡形成的空白区,然后根据车辆拓扑结构约束进行联合评估,最终实现车辆提取。具体流程如图1所示,本文重点介绍车辆联合提取部分。
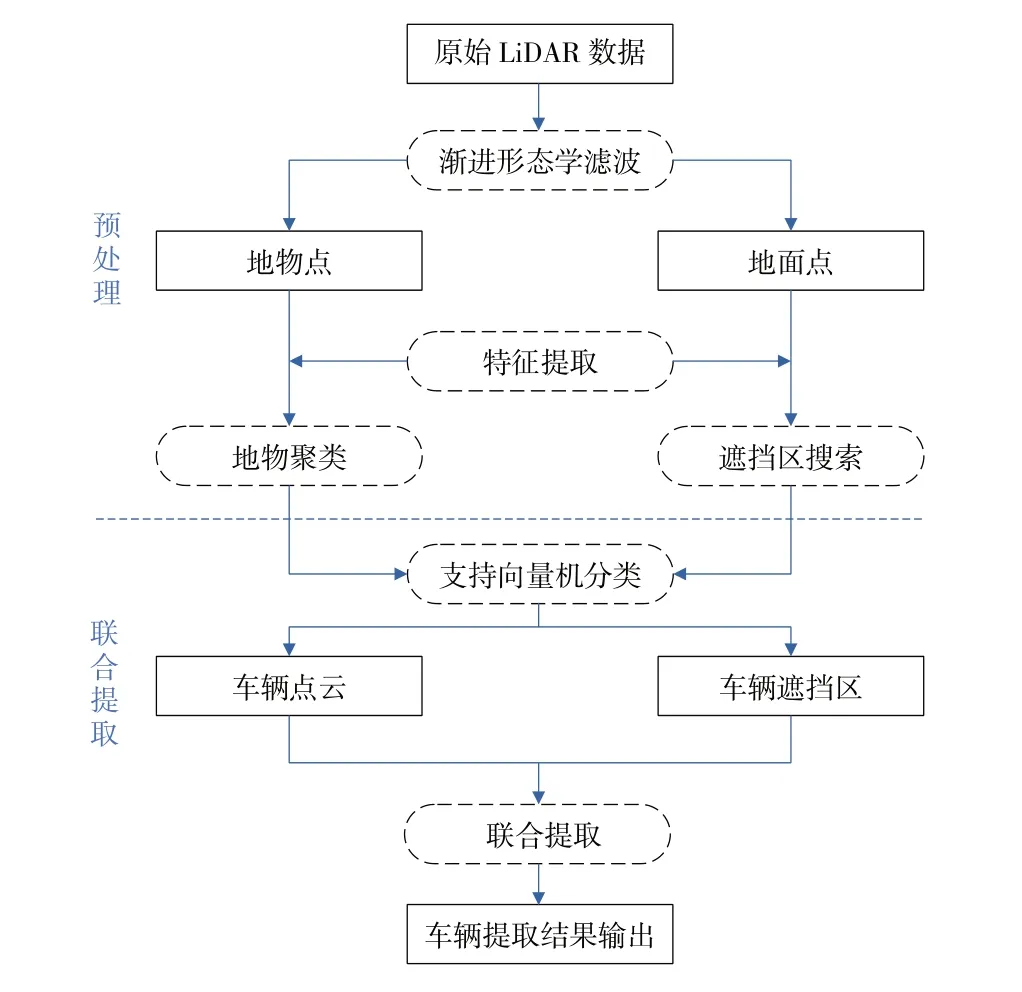
图1 车辆联合提取流程图
2 数据预处理
2.1 渐进形态学滤波与去噪
LiDAR滤波算法包括曲面拟合法[9-10]、TIN网格法[11]、坡度阈值法[12]、形态学滤波法[13]等,本文采用渐进形态学滤波分离地面点和地物点[14]。该算法通过逐渐增加窗口大小并采用不同的高程差阈值实现滤波,能滤除不同尺度的地物[15],其中每次迭代的滤波阈值dhi,T为:

式中,dh0为初始高程差阈值,一般取0.2~0.3 m;dhmax为最大高程差阈值;s为最大地面坡度;c为网格大小;wi为滤波窗口大小。
由形态学滤波特性可知,高程值较大的噪声能被开运算剔除,但对于高程值比地面低的噪声,形态学滤波无法自动剔除,因此需在滤波后采用孤立点检测的方法剔除低矮的噪声点。
2.2 地物点聚类与遮挡区搜索
渐进形态学滤波后的地物包括建筑物、植被、车辆、桥梁、电线等点云,车辆检测前需先将地物聚类,以便提取各类地物的特征,从而采用分类方法进行提取。DBSCAN算法[14]是一种基于密度的空间聚类算法,聚类速度快且无需设定聚类个数,适用于数据量较大且分布均匀的点云数据聚类。其基本思想是对于一个聚类中的每个点,在给定的邻域包含的对象个数不少于给定阈值。该算法需要进行大量邻域搜索,为提高聚类效率,先对点云进行规则网格划分。
滤波后的地面点云中含有大量空白区,大部分是由建筑物、树木、车辆等地物遮挡形成的,也有一部分是由物体表面吸收或镜面反射导致的。对遮挡区进行搜索,便于在分类时提取遮挡区特征。本文先将地面点转换为二值图像,再通过闭运算剔除细小的空白区,最后采用连通区搜索方法实现遮挡区提取。
3 车辆联合提取
3.1 地物聚类与地面遮挡区的支持向量机分类
为实现车辆提取,本文首先分别对地物聚类和地面遮挡区进行特征提取,再利用支持向量机进行车辆识别。地物聚类特征属性包括面积、平均高度、高差、长宽比、平面性、圆形度和矩形度,遮挡区属性包括面积、长宽比、圆形度和矩形度。各类属性的具体含义描述为:①面积S,目标的平面投影所占面积;②平均高度Ah,目标上所有点的高程值与最低点高程值之差的平均值,;③高差dh,目标上最大高程值与最小高程值之差,dh=max(h)-min(h);④长宽比M,目标长度与宽度之比,汽车的长宽比一般大于1小于4;⑤平面性P,设目标上所有点的协方差矩阵的特征值分别为λ1、λ2、λ3,则,该值越大,表明目标越接近平面;⑥圆形度E,目标与圆形的接近程度,,其中L为目标周长,当E=1时,目标为标准圆形,E越小与圆形的差距越大;⑦矩形度R,目标面积S与外接矩形的面积Sr之比,该值为1时为标准矩形,越接近1,表明越接近矩形。
在提取特征后,将特征值归一化到[-1,1],再采用单类支持向量机对目标进行分类识别。本文选用RBF核函数,正则化参数γ和核函数参数δ由十折交叉验证训练得到。
3.2 联合提取
设支持向量机识别的车辆聚类结果为χ(Oi)∈[-1,1],其中Oi为聚类点集,χ(Oi)=1表示该点集为车辆点集,否则为非车辆点集;遮挡区识别结果为γ(Ψi)∈[-1,1],其中Ψi为遮挡区,γ(Ψi)=1表示该空白区是车辆遮挡形成的。由于地物遮挡形成的空白区可能与车辆空白区相似,进而导致支持向量机分类错误,因此需进一步结合该遮挡区内点集的高程信息进行修正。对于∀pm,pn,p′g∈P(Ψvi) ,P(Ψvi) 为车辆遮挡区内的点集,修正后的识别结果为:

式中,dh(pm,pn)为点pm与pn的高程差;dhv为汽车高度阈值,一般为4.5 m;为遮挡区范围中心虚拟地面点,其高程由附近地面点插值得到;hv为汽车最高点到地面的距离阈值,一般为4.5 m。
通过式(2)能将大部分与车辆相似的地物遮挡区剔除。ς(Ψvi)=0则表示无法判断该遮挡区是否为车辆遮挡区。
基于地物聚类的车辆提取方法与基于地面遮挡区的车辆提取方法各有优势,前者对表面反射点较多且分布均匀的目标提取效果较好;后者受表面反射点多少与分布影响较小,只与地物的遮挡区域形状有关,对反射点少的目标提取效果较好。因此,可将这两种方法进行联合提取,以提高提取的精度和完整度,降低虚警率和漏检率。
联合提取的基本原则为:①地物聚类识别结果和遮挡区识别结果若均为1,则联合提取结果为1,若均为-1,则联合提取结果为-1;②当地物聚类点较少时,以遮挡区识别结果为联合提取结果;③当地物聚类点较多时,以地物聚类识别结果为联合提取结果;④若遮挡区识别结果为0或地物聚类识别结果为1、遮挡区识别结果为-1,则联合提取结果为0。
根据上述原则,地物点聚类识别与遮挡区识别联合提取结果为:

式中,Num(Oi)为地物聚类Oi的点数;Nv为其阈值。
4 实验数据与结果分析
本文通过实验验证联合车辆提取方法的性能,选用ISPRS提供的用于检验城区地物提取方法的参考数据Toronto数据集[15],其中LiDAR数据由Optech ALTMORION M机载激光扫描系统于2009年2月采集,飞行高度为650 m,速度为220 km/h,整个数据包括6个条带,点密度为6 pts/m2。本文选取其中具有代表性的3块数据进行实验,如图2所示,实验区分别包含277辆、275辆和435辆汽车。本文分别对3个实验区进行渐进形态学滤波与去噪,首先将房屋、树木和车辆等地物点与地面点分离;然后采用DBSCAN算法对地物进行聚类,并对遮挡区进行搜索。单类支持向量机的训练数据采用人工识别提取,选取不同类型具有代表性的车辆共30辆,分别计算各类属性特征,统计结果如表1所示。
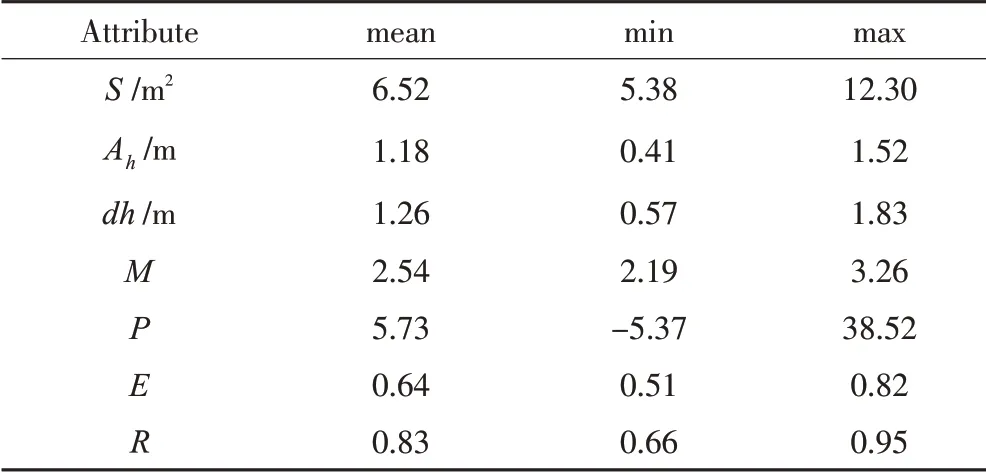
表1 训练数据属性统计

图2 实验区原始点云图
4.1 定性分析
3个实验区的车辆提取结果如图3~5所示,图中红色为地物聚类识别提取的车辆,蓝色为遮挡区识别增加提取的车辆,右侧分别为A、B区域的原始点云。区域1的联合提取结果(图3)中包含正在施工的工地,底部为火车轨道,A为停车场,大部分车辆被正确提取,B为两栋楼之间的狭长地带,建筑结构较复杂,其中的两辆车均被正确提取。区域2的联合提取结果(图4)中包含4条道路,其中一条道路中间有隔离带,点云分布与车辆较相似,联合提取方法能正确地将其与车辆区分;由右侧原始点云可知,其中有一部分车辆点云较稀疏,有的甚至只有3个点,地物聚类方法未能提取出这部分车辆,而联合提取方法对这些表面点稀疏的车辆提取效果较理想。区域3的联合提取结果(图5)中包含大量并排停放且靠近建筑物的车辆(A、B区域),联合提取方法能正确提取该类型的车辆,B区域中有带树木的道路,部分车辆被树木遮挡,仅有部分激光穿透到车辆表面,联合提取方法同样能正确提取这部分车辆。综上所述,联合提取方法在复杂城区环境下的车辆提取效果较理想,能正确区分类似车辆的地物,在激光穿透率较高的情况下不受树木遮挡影响,对表面点极为稀疏的车辆提取效果较理想。

图3 区域1联合提取结果与A、B区域原始点云

图4 区域2联合提取结果与A、B区域原始点云

图5 区域3联合提取结果与A、B区域原始点云
4.2 定量分析
为进一步分析联合提取结果,本文采用正确度和完整度两个指标对提取结果进行定量评价[16-17]。正确度,完整度,其中TP为正确提取的车辆数,FP为错误提取的车辆数,FN为未被提取的车辆数。进而可知,虚警率Fa=,漏检率In。由于该区域的航空影像与LiDAR数据采集的时间不同,且车辆具有流动性,无法将影像直接作为参考对车辆提取结果进行评判,因此本文采用人工识别方法,将识别的车辆与航空影像进行对比,以排除被错分的类似车辆的地物。
3个区域的联合提取精度如表2所示,可以看出,地物聚类识别的精度较高但完整度较低,该方法通过提取车辆表面点集特征实现车辆识别,虚警率较低,但对于表面点集较少的车辆,提取的特征不能很好地反映车辆实际特征,因此漏检率较高;遮挡区提取结果的完整度高但精度低,该方法通过提取地物遮挡区的特征实现车辆识别,一般情况下,车辆都会形成遮挡区,即使表面点集较少的车辆同样具有相似的遮挡区,因此漏检率低,但该方法易受与车辆遮挡区特征相似地物的影响,虚警率较高;联合提取方法同时具有较高的精度和完整度,综合了上述两种方法的优点,克服了各自的缺点,提取效果较理想。

表2 联合提取结果
5 结语
针对没有影像辅助情况下的机载LiDAR车辆提取问题,本文提出了基于地物聚类与遮挡区搜索的支持向量机车辆联合提取方法。实验结果表明:①地物聚类方法受车辆表面点集分布和数量的影响较大,特别是较难提取表面反射点稀疏的车辆目标,因此完整度较低,但该方法精度较高;②基于遮挡区搜索的提取方法不受表面点集分布和数量的影响,只与遮挡区的形状特征相关,而一般情况下车辆均能形成相似的遮挡区,因此该方法的完整度较高,但易将遮挡区以及与车辆相似的地物识别为车辆,精度较低;③联合提取方法综合了两种方法的优点,较好地避免了稀疏点集与相似遮挡区地物的影响,同时提高了车辆提取的精度和完整度。
