WPZ-500型无砟智能铺轨机组滚筒回收车设计
2022-10-02管新权段启楠
管新权,段启楠
(中铁四局集团有限公司第八工程分公司,安徽 合肥 230041)
铺轨工程作为高速铁路施工的重要环节,属于劳动密集型施工。为降低工作强度、提高铺轨效率,通过运用智能化技术,开展高速铁路智能铺轨各工序的机械化、信息化、自动化研究,研发新型智能铺轨施工装备及相关技术,应用于高速铁路铺轨施工,解决高速铁路铺轨用工难和技术落后的问题。智能铺轨机组与传统铺轨机形式相同,均采用前牵引导向、后拖拉推送形式[1]进行无砟道床500 m长钢轨敷设,主要由长钢轨智能牵引车、长钢轨智能滚筒回收车、长钢轨智能推送车和智能分拣车组成。长钢轨智能滚筒回收车主要用于滚筒回收和钢轨落槽,其工作性能直接决定整个机组的铺轨效率。邓建华[2]对WZ500E无砟智能铺轨机组长钢轨牵引车结构设计和工作原理进行分析;武慧平[3]运用I-DEAS软件对CPG500型铺轨机组作业车车体结构静强度、刚度进行有限元分析;陈孟强[4]基于“群枕式布枕,步进式铺轨”作业模式,研制出群枕式长轨铺轨机组;唐海斌[5]运用AMESim软件对长钢轨推送机构液压系统进行建模及仿真分析,得到油缸和马达的动态特性响应规律,为钢轨推送优化提供指导;甘建伟[6]对铺轨机组牵引装置分散动力驱动和液压系统同步分流进行研究,并利用模糊PID控制器进行行走速度稳定控制。可见,目前国内外对无砟轨道铺设工艺和铺轨设备有一定研究。本研究通过分析WPZ-500无砟智能铺轨机组滚筒回收车结构组成和工作原理,探讨不同工况下回收车的行驶速度和牵引力数学匹配关系,并校核了滚筒回收车车架的强度刚度,为智能铺轨机组滚筒回收车进一步优化设计提供参考。
1 滚筒回收车结构组成和工作原理
长钢轨智能滚筒回收车由车架总成、行走装置、推/拉滚筒机械手组、拾取滚筒机械手组、中转输送带、堆码滚筒机械手组以及抓/抬钢轨机械手、倒装机构、司机室、动力系统、液压控制系统和电气控制系统等组成,如图1所示。
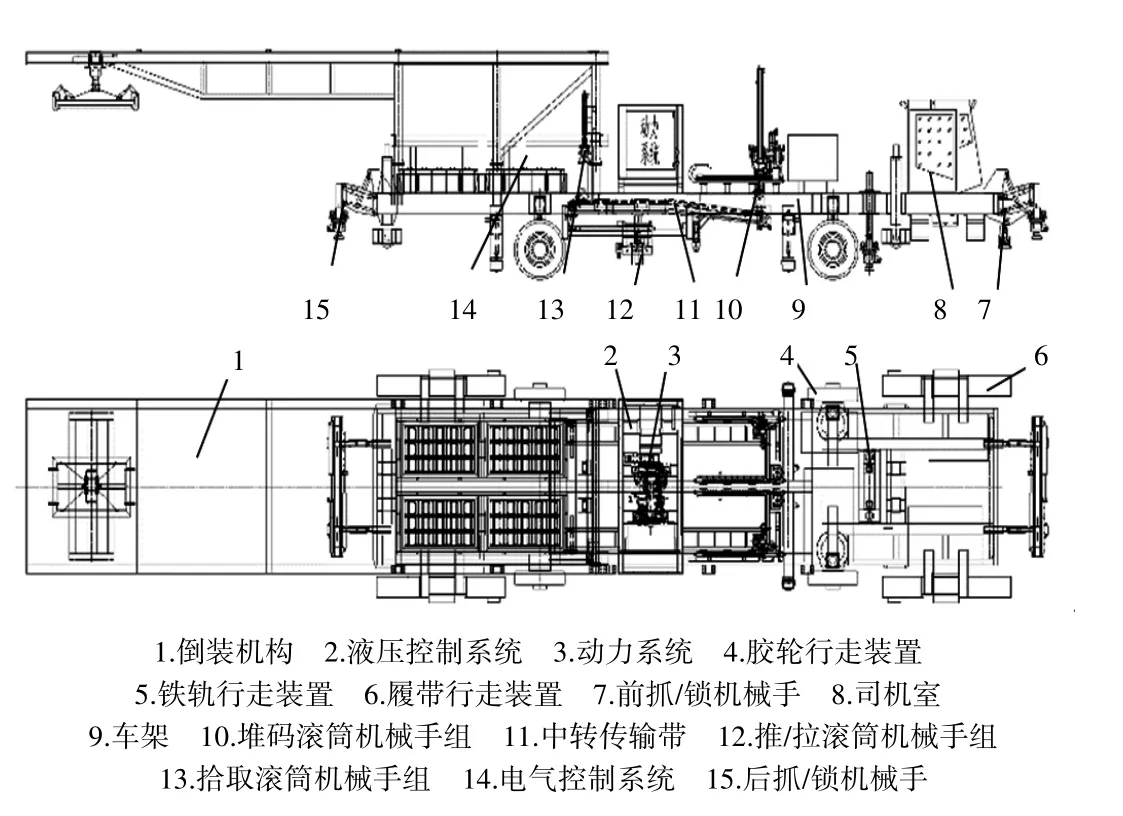
图1 长钢轨智能滚筒回收车结构组成
1.1 走行装置
如图2所示,长钢轨牵引车有三套走行装置:轮胎走行装置、履带走行装置和钢轨走行装置。

图2 走行装置
轮胎行走装置有前后两组驱动桥,独立驱动,用于滚筒回收和钢轨入槽作业时的行走,设备大部分作业时间使用轮胎行走;驱动桥由驱动桥支架、回转支撑、减速器支架、液压马达和减速器等组成,其中减速器与车轮总成连接安装。转向装置设置在车辆前方2组驱动桥上,由转向油缸和拉杆组成。转向油缸控制车轮转向,拉杆控制两组车轮转向同步。
铁路走行机构由伸缩架、升降油缸、车轮等组成。铁路走行机构的升降由升降油缸垂直调节,以适应车辆过道岔或者短距离的铁路行驶。铁路走行机构不带驱动,仅作为行走导向,由后驱动桥轮胎压在钢轨上提供摩擦驱动力,实现铁路行走。
履带走行装置有2套履带走行机构,每套履带走行机构由1套履带走行桁架和2条走行履带组成,每套履带走行机构由1套履带走行桁架和2条走行履带组成。履带走行桁架包含桁架梁、转向油缸、横移油缸、回转支撑等。桁架梁其采用Q345B钢材组焊加工制造。每条走行履带包含驱动马达、减速机、履带总成等。通过横移油缸推动,使走行履带满足不同履带间距调整的要求。每条走行履带均有一套转向油缸控制转向,以及一个独立的行走马达减速机驱动,行走减速机装有常闭式停车制动器。履带走行主要用于有砟轨道铺设作业时的行走。
1.2 机械手装置
车身上布置有2套推/拉滚筒机械手、2套拾取滚筒机械手(图3)、2套堆码滚筒机械手,均由伺服电机驱动,具有x、y和z轴三个方向自由度。推/拉滚筒机械手控制机械手末端滚筒钩抓伸到滚筒侧板挂耳下,将地面滚筒从钢轨下方取出并摆放到道床中间位置。拾取滚筒机械手控制末端抱爪伸到滚筒中心正上方,将滚筒从地面拾取搬运到中转传送带上。中转传送带将滚筒送至中转台,堆码机械手控制末端抱爪伸到滚筒中心正上方,将滚筒按顺序堆码到滚筒存放篮中。

图3 拾取滚筒机械手
1.3 钢轨夹持装置
两套抓/锁机械手分别固定在车架前、后端,如图4所示。通过升降油缸控制抓/锁机械手升降,调整钢轨的提升高度;通过横移油缸控制夹轨器组件在横梁上移动,调整钢轨左右位置,通过抓/锁机械手、升降油缸和横移油缸的联合作业可以实现钢轨的智能锁紧、准确对位和自动入槽。
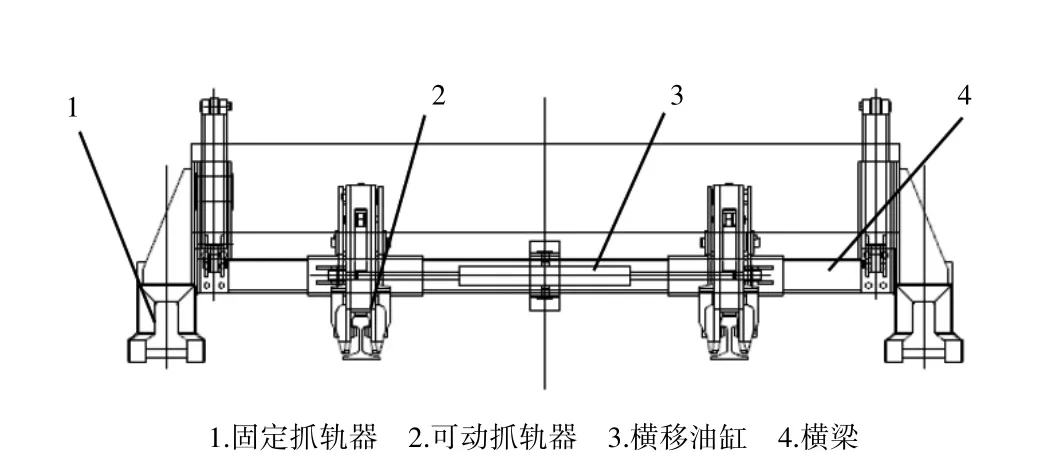
图4 抓/锁机械手
2 滚筒回收车行驶特性分析
路面干燥及一般潮湿状态下,车轮实际粘着牵引力Fm计算公式为

式中:m0为牵引车单个轮胎承重,6.615 t;μ为橡胶轮胎在混凝土路面的黏性系数,0.6;将各参数代入,可以求得Fm=158.76 kN。
轮胎行走Fy运行阻力算式为:

式中:Fg为轮胎行走滚动阻力,取7.936 kN;Fp为爬坡时车身自重产生的阻力,取7.95 kN;Fw为风载荷作用车车身上产生的阻力,取4.79 kN;Ft为机械手抓抬铁轨产生的阻力,取10kN;将各参数代入,可以求得爬坡时,Fy=30.676 kN,平地行走时,Fy=22.726 kN。滚筒回收车爬坡时所受阻力如图5所示。

图5 坡度30‰滚筒回收车受力分析示意图
可见,重载工况下牵引车粘着牵引力Fm>Fy,车轮是不会出现打滑。
当海拔高度小于3000 m时,对柴油机功率输出影响较小,但海拔高于3000 m时,每升高300 m功率下降4%,经计算可知,当海拔高度达5000 m时,柴油机功率下降约30%。选择输出功率Pde0=168 kW的柴油机,在海拔5000 m工地使用时,其输出功率Pde0=117.6 kW。
坡道运行速度计算公式为

式中:Ps为车辆上其它功耗(含散热、电气控制、照明)不会超过45 kW,取45 kW;η为发动机工作效率,取0.7;将各参数代入,可以求得海拔2000 m以下时,Vt0=2.8 km/h;海拔5000 m时,Vr=1.1 km/h,满足作业行驶速度要求。
3 滚筒回收车车架有限元分析
为保证钢轨入槽与滚筒回收工作的安全性和稳定性,需要对滚筒回收车进行有限元分析[7,8],尤其是对胶轮行驶状态车架的强度和刚度分析,车架的材料为Q345B。车架的网格划分模型、车架的应力状态分析和位移变形状态分布,如图6所示。从图中可以看出,最大应力为149 MPa,位于中间纵梁位置,这是因为车架两端抓/抬轨机械手受钢轨作用力,且车架后方放置有滚筒存放篮,当滚筒都放满时重达3 t,所以车架中部位置所受弯矩最大,但经计算可知应力安全系数可以达到2.32;车架最大位移变形位置分布在前后两端,但最大位移变形仅有3 mm,对滚筒回收车抓放钢轨和滚筒回收运动影响很小。因此,滚筒回收车车架的设计具有安全裕量,可进一步进行结构优化。

图6 滚筒回收车架强度刚度分析
4 结论
滚筒回收车是WPZ-500型无砟智能铺轨机组的主要组成部分。通过研究滚筒回收车的机构组成及工作原理,对重载爬坡工况下牵引速度以及胶轮行驶状态下车架强度刚度进行计算分析,可以得出如下结论:
(1)滚筒回收车三套行走装置可以满足公路与铁路路面的转场及行驶作业要求;推/拉滚筒机械手、拾取滚筒机械手和堆码滚筒机械手的联合作业可以完成滚筒的拖放、拾取和堆码;抓/锁机械手可以实现长钢轨的自动锁紧、对位和下放入槽。
(2)滚筒回收车所用发动机可以满足不同海拔高度的功率需求;路面一般潮湿条件下,其牵引力远远大于运行阻力,在海拔高度2000 m和5000 m时,其行驶速度分别为2.8 km/h和1.1 km/h。
(3)最大应力为149 MPa,处于车架中间位置,其应力安全系数可达2.4;最大位移变形位于车架两端,最大值仅有3 mm,可见回收车还有结构优化的空间。
根据计算分析结果,滚筒回收车结构能够满足现场施工要求。如图7所示,样机试制完成后,已完成首对500 m长钢轨自动铺设。

图7 滚筒回收车
