顾及时空因素的青藏高原地区加权平均温度模型
2022-09-29莫智翔李佳豪周吕黄良珂刘立龙
莫智翔 李佳豪 周吕 黄良珂 刘立龙
0 引言
水汽及其变化是天气、气候变化的主要驱动力,是灾害性天气形成和演变过程中的重要因子.大气水汽的变化与降水直接相关,在大气能量传输、天气系统演变、大气辐射收支、全球气候变化等多种气象演变中扮演着重要的角色[1-2].大气可降水量(Precipitable Water Vapor,PWV)又称大气水汽总量,定义为地面上大气柱中的总水汽量,是表征大气水汽含量以及空中水资源的重要指标[3-4].目前,对大气水汽含量的探测主要依靠常规的无线电探空站、雷达观测和水汽辐射计等技术,但使用费用昂贵,且时空分辨率低,离监测和预报中小尺度灾害性天气的要求还有很大差距.全球导航卫星系统(Global Navigation Satellite System,GNSS)能较好地弥补传统大气水汽探测技术在时空分辨率上的不足,并提供精细化气象预报所需要的高精度、大容量、近实时的大气水汽资料.
GNSS反演的PWV的计算通常由GNSS卫星信号传播延迟时的对流层天顶湿延迟(Zenith Wet Delay,ZWD)乘以水汽转换系数得到,而水汽转换系数的关键参数就是大气加权平均温度(Tm).因此,在GNSS反演大气水汽中,Tm是获取GNSS大气水汽的一个关键参数,准确地计算Tm值是提高PWV计算精度、实现实时PWV估计的重要保证.Tm值可以利用探空资料或大气再分析产品等气象参数通过数值积分法计算获取,但受限于地理、数据获取等因素,不容易获取任意位置处的Tm值.为此通常需要建立一个准确的Tm模型来满足这些需求,为用户提供便利.目前,Tm模型主要分为需要实测气象参数的Tm模型和不需要实测气象参数的Tm模型.在需要气象参数的Tm模型中,文献[5]利用北美8 718个探空站发现Tm与地表温度(Ts)具有良好的线性关系,并提出了一种常用的Tm计算经验模型(Bevis模型).由于Bevis模型应用到其他地区会存在一定的系统偏差[6],诸多学者针对不同地区对Bevis模型进行分析和改进[7-8].文献[9]利用探空数据建立了适用于中国东部地区的Tm模型,并取得良好的效果;文献[10]分析了Tm与Ts、纬度、海拔、水汽压和大气压之间的关系,建立了Tm单因子和多因子回归模型;文献[11]则在Bevis公式的基础上在中国西部地区建立了一种顾及Ts、高程和季节变化的Tm模型.在不需要气象参数的Tm模型中,这类模型一般是基于局部或全球多年的Tm数据构建的经验模型.文献[12]首先构建了欧洲地区与纬度和季节相关的非气象参数Tm模型(Emardson模型),诸多学者也对其进行了改进[13].文献[14]提出一个全球经验对流层格网模型(GPT2w模型),该模型有1°×1°(GPT2w-1)和5°×5°(GPT2w-5)两种分辨率,只要输入目标经纬度、高程和相应的年积日,即可提供所需的包括Tm在内的对流层参数.文献[15]建立了中国区域顾及垂直递减率函数的非气象参数Tm模型.虽然非气象参数Tm模型不用依赖实测的气象参数,但与采用实测气象参数的Tm模型相比,存在一定的系统误差,其精度在局部地区的表现还有待进一步验证.
青藏高原位于欧亚大陆中部,是世界海拔最高的高原,被称为“世界屋脊”.它的冷热作用对中国、东亚乃至世界的大气环流和气候变化具有非常重要的影响[16].青藏高原地形多样、水汽分布复杂,且探空站分布稀疏,导致青藏高原水汽的监测成为大气探测中的难题.此外,大多现有的Tm模型在青藏高原地区的适用性较差,且未在该地区有深入的研究.因此,研究建立高精度的青藏高原区域Tm经验模型具有重要的现实意义.本文利用2014—2017年分布在青藏高原地区的探空资料分析了Tm与Ts、纬度和高程在青藏高原地区的相关性,在此基础上建立了适用于青藏高原地区的顾及时空变化因素的多因子Tm模型(TPTm模型),并利用2018年的探空数据作为参考,验证该模型的精度,为青藏高原地区高精度的GNSS水汽反演、应用提供重要的参考依据.
1 计算原理及数据来源
1.1 计算原理
GNSS反演的大气水汽PWV[5]由天顶湿延迟ZWD乘以水汽转换系数Π得到:
VPW=Π·ZWD,
(1)

(2)
式中:ρw=1×103kg/m3为液态水的密度;Rv=461.495 J·kg-1·K-1为水汽气体常数;k′2,k3为大气物理参数,经验值通常分别为22.13±2.20、(3.739±0.012)×105K/hPa;Tm为大气加权平均温度,可以由测站上空水汽压和绝对温度沿天顶方向的积分函数求得,其数学表达式[17]为
(3)
式中:e和T分别为测站天顶方向某高度的水汽压(hPa)和绝对温度(K);z表示测站上空的垂直高度(m);hs为测站大地高(m).在探空资料中,一般提供了相对湿度HR和绝对温度T,而水汽压e并没有直接提供,但可以通过饱和水汽压es(hPa)和露点温度Td(单位为℃,T=Td+273.15)来计算得到,公式为
(4)

(5)
在实际中,式(3)采用以下积分公式离散化得到:
(6)

Tm=a+bTs,
(7)
式中,公式系数a和b可利用最小二乘法计算得到.Bevis等[5]利用北美地区探空资料构建的Bevis模型曾被国内外诸多学者采用,其求取的a,b系数分别取值为70.2和0.72.
1.2 数据源介绍
美国怀俄明州立大学网(http:∥www.weather.uwyo.edu/upperair/sounding.html)可以直接下载探空站的观测资料.其中探空站资料包括探空气球每天在0时和12时探测两次的大气分层数据,数据包含这两个时刻的气压、温度、露点温度、相对湿度等相关气象数据,还提供了测站的位置信息.根据不同的等压面,可由数值积分法计算Tm值,并从探空数据中获得Ts值.本文选取2014—2017年均匀分布在青藏高原地区13个探空站的观测数据来进行模型构建,用2018年的相应探空资料进行评估、验证.探空站点位分布及各站点相关信息如图1和表1所示.
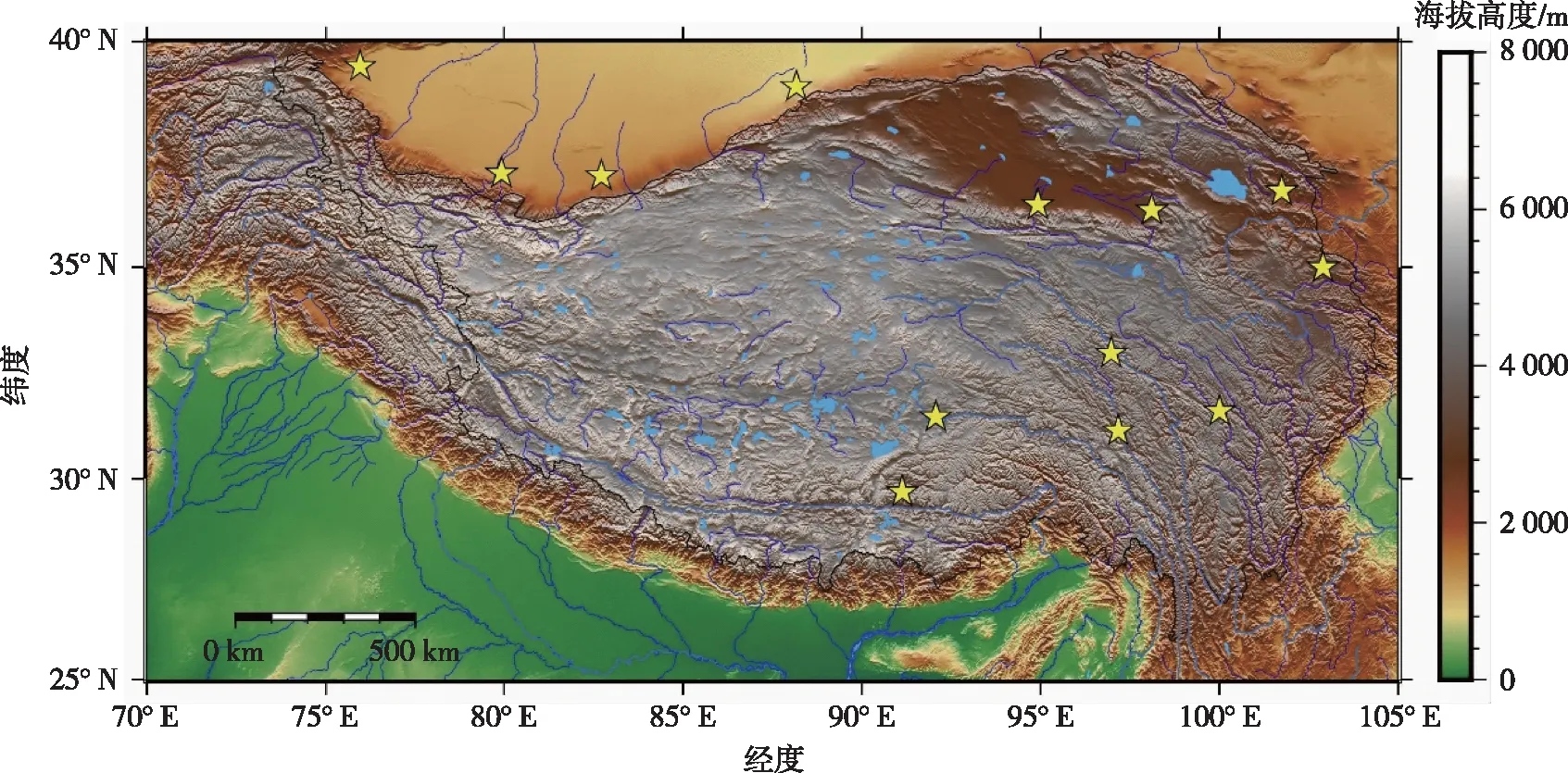
图1 青藏高原地区13个探空站分布Fig.1 Distribution of the 13 radiosonde stations in Tibetan Plateau
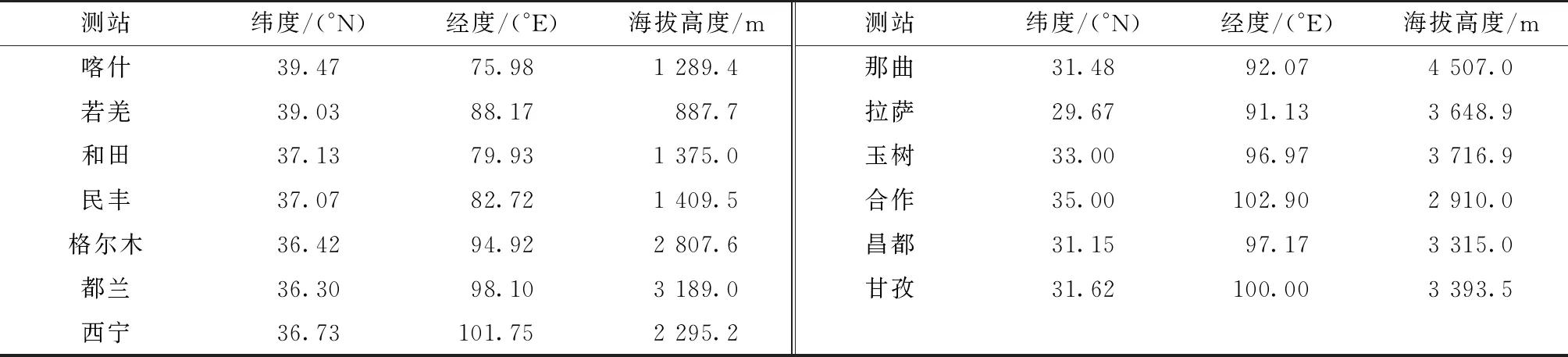
表1 青藏高原地区13个探空站信息情况

图2 青藏高原地区Tm与Ts、高度和纬度的相关性Fig.2 Relationship between Tm,Ts,altitude and latitude for Tibetan Plateau
2 模型的建立与评估
2.1 加权平均温度与地面温度、高度和纬度相关性分析
青藏高原地区地形起伏大、气候变化多端,极大地影响了Tm的准确计算.文献[17]表明Tm与Ts、高度和纬度具有较大的相关性.虽然Tm与Ts的线性关系已被证实,但在一些地区有出现Tm与Ts的关系不密切的现象[18],因此有必要分析在青藏高原地区Tm与Ts的关系.为了更好地分析Tm随Ts、高度和纬度的变化关系,本文选取了2017年青藏高原地区13个探空站数据,利用数值积分法计算出每个站点的Tm值并对其与相应测站的Ts、高度及纬度的相关性分别进行探究,结果如图2所示.
图2表明青藏高原地区的13个探空站点的Tm值与Ts、高度和纬度均存在近似的线性变化关系.其中Tm和Ts、Tm和纬度为正线性相关,Tm和高度为负相关.Tm和Ts的相关性最强,相关系数为0.879,Tm和高度、纬度则次之.由此可见,考虑Tm随Ts、高度及纬度的变化并对其进行相应改正是准确计算Tm的关键,在建立Tm模型时可以考虑加入这三个要素的变化.
2.2 TPTm模型的建立
文献[5]已经提出了一个简单的线性关系式Tm=a+bTs来表示Tm和Ts之间的关系.然而,由于Tm同时也与高度和纬度有显著的相关性,因此相比于简单的线性关系式,建立一个顾及多种因素的多因子Tm经验模型可以更精确地获取所需的Tm值.除空间因素外,Tm和Ts存在着时间变化,其表现为年周期和半年周期变化[17].因此,在用Tm和Ts的简单线性关系式计算Tm时,会引入周期残差[19].为了探讨Tm残差的季节变化,以2013—2018年玉树探空站获取的Tm和Ts为例,先建立其线性关系式,然后将实测的Tm与关系式得到的Tm相减求出其Tm残差,结果如图3所示.
由图3可知,Tm残差具有明显的季节变化,主要体现为年周期和半年周期的变化特性.一个好的Tm模型应该同时考虑空间和时间的变化,因此在构建Tm模型时还需顾及Tm残差的年周期和半年周期变化.基于上述内容,本文对Tm和Ts线性模型进行修正,增加了调和函数,并在模型表达式中考虑高度和纬度的变化.模型公式如下:
Tm(Ts,h,φ,DOY)=A0+A1Ts+A2h+A3φ+

(8)
式中,h为海拔高(km),φ为大地纬度,DOY为年积日,A0,A1,A2,A3,B1,B2,B3,B4均为模型系数.本文采用均匀分布在青藏高原地区的2014—2017年13个探空站数据,利用最小二乘法对式(8)中的系数进行求解,由此得到青藏高原地区的顾及时空因素的大气加权平均温度新模型(TPTm模型),求解的模型系数如表2所示.
TPTm模型是一个适用于青藏高原地区的多因子局域经验模型,使用者仅需提供目标处的Ts、海拔高、纬度和年积日,即可通过模型计算出目标处的Tm值.此外,采用与TPTm模型同样的建模数据,将式(7)中的a,b系数进行重新计算,构建一个青藏高原地区Bevis精化模型(Bevis-TP模型),求取的a,b值分别为83.2和0.66,后续将该模型与TPTm模型进行对比,以衡量TPTm模型中考虑时空因素所带来的改进.
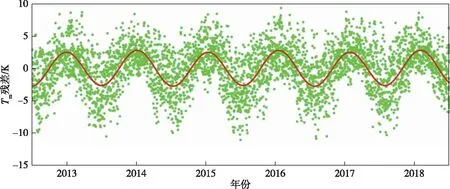
图3 玉树探空站Tm残差时序变化Fig.3 Variations of the Tm residual errors from 2013 to 2018 in Yushu radiosonde station

表2 TPTm模型的系数
2.3 TPTm模型的精度验证
本文采用偏差(bias)和均方根误差(RMS)两种指标来作为模型的精度评估标准,其表达式为
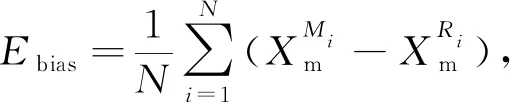
(9)

(10)

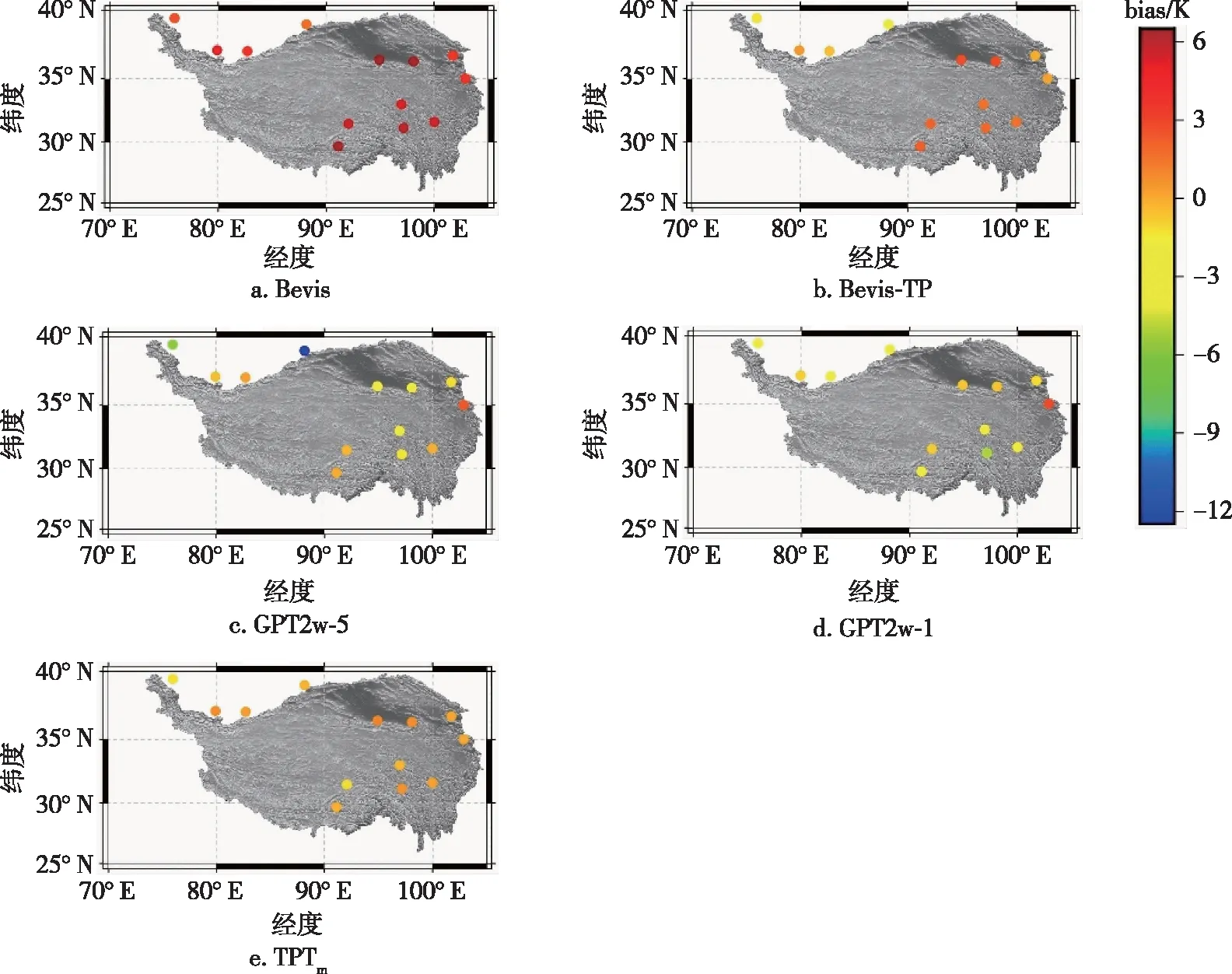
图4 使用2018年探空站数据检验不同模型的偏差分布Fig.4 Distribution of biases for different models tested using radiosonde profiles of 2018
为了评估新建立的TPTm模型的精度,本文以2018年的青藏高原地区相应的13个探空站数据作为参考值,来验证TPTm模型的精度,同时与常用的Bevis模型、Bevis-TP模型和目前表现不错的GPT2w对流层模型进行对比分析.TPTm模型和Bevis模型所需要的Ts值均由相应的探空站提供.不同模型计算出的Tm值分别与参考值进行差值对比分析,由此可计算出2018年不同模型的年均偏差和RMS值,结果分别见表3、图4和图5.
由表3可知:Bevis模型表现出最大的正偏差值和年均偏差值,分别为6.45 K和4.68 K,GPT2w-5表现出显著的负偏差值,其大小变化范围从-12.1K至2.5 K,而TPTm模型具有最小的年均偏差值,为0.07 K,其偏差变化范围也是4个模型里最小的,大小变化范围从-1.35 K至1.07 K;对于RMS值,Bevis表现出最大的RMS值,为6.07 K,而TPTm模型的年均RMS值最小,为2.76 K.局域精化后的Bevis-TP模型比Bevis模型在精度上有明显的提升,表明基于本地数据构建的Bevis-TP模型相比外地数据构建的Bevis模型可靠性更高.相比于GPT2w-5模型,GPT2w-1模型的偏差值和RMS值都有明显改善,没有出现过大的绝对偏差值和RMS值,表明水平分辨率较高的GPT2w-1模型相比水平分辨率低的GPT2w-5其精度有一定改善且相对稳定.相比于Bevis、Bevis-TP、GPT2w-5和GPT2w-1模型,TPTm模型的精度分别提高54.5%(3.31 K)、30.8%(1.23 K)、36.3%(1.57 K)和27.6%(1.05 K),表明TPTm模型在青藏高原地区计算的Tm值明显比其他模型的精度高,特别是对Bevis模型其精度有较好的改善.

表3 使用2018年探空站数据验证不同模型的精度对比

图5 使用2018年探空站数据检验不同模型的RMS误差分布Fig.5 Distribution of RMS errors for different models tested using radiosonde profiles of 2018
由图4可以看出,Bevis模型在青藏高原地区多个站点存在显著的正偏差,GPT2w-5和GPT2w-1模型则存在明显的负偏差,而TPTm模型在青藏高原地区整体表现出较小的偏差和良好的稳定性.由图5可知,Bevis模型在青藏高原地区的RMS误差整体偏大.其中在青藏高原地区的东部,Bevis模型的RMS值明显大于其他地区,且这些误差大的站点位于海拔较高的地区,表明在对于像青藏高原那样的高海拔地区,Bevis模型不能准确地计算当地的Tm值.而利用青藏高原局地的探空资料构建的Bevis-TP模型精度表现相比Bevis模型有明显的改善,尤其在青藏高原东部高原地区改善明显.这是由于Bevis模型是利用美国本土(27°~65°N地区)探空资料建立的,该模型在青藏高原地区使用时可能会产生局域模型系统误差,使获得的Tm值并非最优.因此,在有气象资料条件下最好采用当地气象数据来构建Tm模型.但Bevis-TP模型与TPTm模型相比,其偏差和RMS误差相对较大.除了青藏高原地形起伏较大的原因外,Bevis和Bevis-TP模型没有考虑Tm和Ts的季节变化也是导致其误差大的主要因素之一.GPT2w模型与Bevis模型相比其表现相对较好,但还存在个别偏大的RMS误差.GPT2w模型虽然考虑了年周期和半年周期变化,但由于忽略了Tm随高程的变化[20],从而导致其在地形起伏较大的青藏高原地区使用时出现显著的系统误差.且GPT2w模型提供逐日的Tm值,无法满足获取逐小时Tm值的需求.然而,TPTm模型克服了这些缺点,它在建模时同时考虑了Ts、地理位置(海拔和纬度)和时间的变化,只要用户提供逐小时的Ts值,就可得到对应每小时的Tm值.与其他模型相比,TPTm模型的总体RMS误差较小,且相对稳定,特别是在高海拔地区表现良好.这些评估结果表明TPTm模型在青藏高原地区具有较好的性能,表现出较高的精度和良好的稳定性.
2.4 Tm对GNSS-PWV计算的影响
建立青藏高原地区的新Tm模型是为了提高Tm的计算精度,其最终目的是提高GNSS反演PWV的精度.但是一般情况下,GNSS基准站与探空站不在同一地址,且大多数GNSS基准站主要用于大地测量研究,未安装气象传感器,所以难以全面、可靠地研究Tm对GNSS-PWV计算的影响.为此,本文采用文献[17]提出的计算Tm对GNSS-PWV的影响的方法,并对计算结果进行分析:
(11)
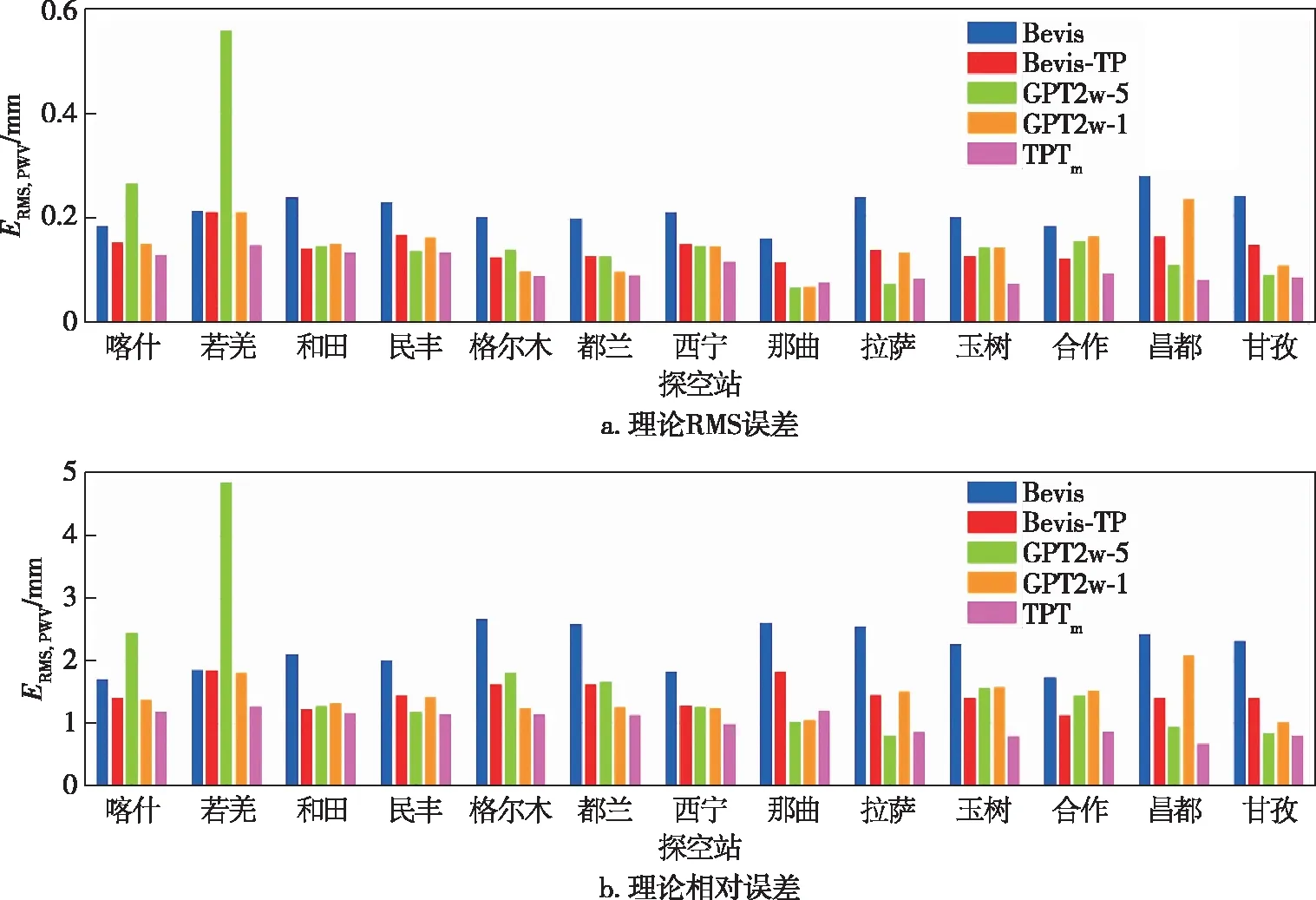
图6 利用2018年探空站资料检验Bevis模型、Bevis-TP模型、GPT2w模型及TPTm模型计算PWV的理论RMS误差和相对误差Fig.6 Theoretical ERMS,PWV and ERMS,PWV/VPW errors from the Bevis,Bevis-TP,GPT2w and TPTmmodels tested using radiosonde data of 2018
式中:ERMS,PWV是PWV的RMS误差;ERMS,Π为转换系数Π的RMS误差;ERMS,Tm是Tm的RMS误差;ERMS,PWV/VPW定义为PWV的相对误差.Tm和PWV采用年均值计算.各模型在13个探空站上的ERMS,PWV和ERMS,PWV/VPW的计算结果如图6所示.
从图6可知,Bevis模型和GPT2w-5模型在多数站点上均表现出较大的ERMS,PWV和ERMS,PWV/VPW值,ERMS,PWV最大值分别为0.28 mm和0.56 mm,ERMS,PWV/VPW最大值分别为2.67%和4.86%.而TPTm模型的整体ERMS,PWV值均小于0.15 mm,平均ERMS,PWV值为0.10 mm.TPTm模型的ERMS,PWV/VPW平均值为1.02%,范围为0.67%至1.27%,比其他模型更稳定且更小.因此,TPTm模型计算出来的Tm值所带来的误差对计算出的GNSS-PWV的影响,相比其他模型要小且较稳定,可以为青藏高原地区的GNSS反演出精确的PWV值提供更为准确的Tm信息.
3 结语
1)本文采用2014—2017年13个探空站数据,建立了顾及Ts、高度、纬度和季节变化的青藏高原地区大气加权平均温度模型(TPTm模型),并以2018年探空站获取的Tm作为参考值,模型的平均偏差和平均RMS分别为0.07 K和2.76 K.
2)通过将TPTm模型与常用的Bevis模型、局域精化后的Bevis模型和GPT2w模型相比较可知,TPTm模型相比其他模型在青藏高原地区的平均偏差和RMS更小、精度更高,对青藏高原地区有着更好的适应性、稳定性.
3)从理论上分析了各模型计算的Tm对GNSS-PWV估计的影响,得到TPTm模型的ERMS,PWV和ERMS,PWV/VPW的平均值分别为0.10 mm和1.02 %,比其他模型更小且更稳定.
总之,TPTm模型得到的Tm精度可靠,可以满足青藏高原地区GNSS水汽探测的要求,从而进一步改善青藏高原地区GNSS大气水汽反演的精度,更好地服务于青藏高原地区气象学的研究工作.
