一种轨道车辆智能化撒砂系统
2022-09-29王善方张方亮
王善方,吴 迪,张方亮,胡 淼
(1.中车青岛四方车辆研究所有限公司,山东 青岛 266112; 2.中国铁路沈阳局集团有限公司 车辆部,辽宁 沈阳 110001)
轨道车辆在雨雪天气或者轨道有水渍、油污、薄冰等情况下,轨道车辆的轮对踏面与轨道之间的黏着性能变差,如果这种黏着状态不能得到及时改善,列车就会出现空转或滑行现象,严重时会造成车轮擦伤和制动距离延长的后果[1]。为了改善轨道车辆轮轨之间的黏着状态,通常会在轨道车辆上配置撒砂系统[2-3],一般设置于轨道车辆的底部并向轨道车辆的轮对踏面和轨道之间喷撒特定规格的砂子(比如:石英砂),以改善轮轨之间的黏着状态[4],从而保证轨道车辆的牵引或制动性能,进而保证轨道车辆的行驶安全性能。
目前,轨道车辆撒砂系统广泛采用单级压力撒砂或两级压力进行撒砂,根据轨道车辆的运行速度选择相应的撒砂输出压力,并进行撒砂控制[5]。撒砂系统中的撒砂口用来将撒出砂箱的砂子引流并喷撒到轮对踏面和轨道之间。轨道车辆在不同的行驶速度条件下,当砂子撒出撒砂口并飞往轮对踏面和轨道的过程中,出砂口处的空气流场对出砂口喷撒的砂子的运动轨迹产生的影响也不同,而砂子的运动轨迹直接影响到达轮轨之间的有效撒砂量,因此,采用单级或两级压力进行撒砂采用的是一种模糊控制方法,不能完全保证吹砂压力的合理范围内,同时,也不能保证出砂口处的实际撒砂量处在目标撒砂量的合理范围内,撒砂精度较低,进而难以有效改善轨道车辆轮轨之间的黏着性能。本文系统地介绍了一种轨道车辆用智能化撒砂系统的组成、工作原理及控制策略等内容。
1 智能化撒砂系统组成及工作原理
图1为轨道车辆智能化撒砂系统的组成。
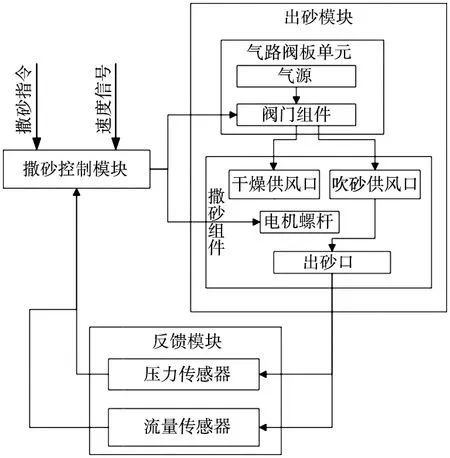
图1 智能化撒砂系统组成及原理示意图
如图1所示,智能化撒砂系统主要由撒砂控制模块、出砂模块和反馈模块组成。各模块的功能和工作原理介绍如下:
(1) 撒砂控制模块:用于接收撒砂指令和读取当前轨道车辆的行驶速度,计算并发送与当前行驶速度对应的撒砂信号,撒砂信号主要包括控制阀门组件的信号和控制电机螺杆的转速信号。另外,当系统执行撒砂功能时,可接受反馈模块输出的压力传感器信号和流量传感器信号。
(2) 出砂模块:由气路阀板单元和撒砂组件组成。气路阀板单元接收撒砂控制模块发出的控制阀门组件的信号,并将此信号转换为干燥供风和吹砂供风输出。撒砂组件提供气路阀板单元输出的干燥供风和吹砂供风接口,并接收撒砂控制模块输出的控制电机螺杆的转速信号,由螺杆将砂箱中的砂子撒出砂箱,电机螺杆的转速大小直接决定撒砂量的大小。具有电机螺杆的撒砂组件结构原理图如图2所示。
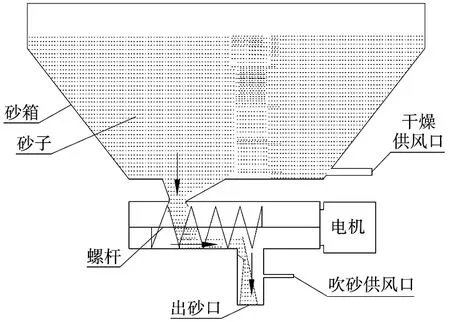
注:箭头代表砂子流动的方向图2 电机螺杆撒砂组件结构原理图
如图2所示,撒砂组件安装在砂箱底部,砂子在重力的作用下会填满进砂口,当螺杆转动时,砂子在螺杆的输送作用下会被运送到出砂口处,从而实现定量撒砂功能。在撒砂的同时,进气口处与气路阀板单元的吹砂出风口相连,可实现定压吹砂的功能。螺杆的转动出砂模块与撒砂控制模块之间采用的是电性连接。
(3) 反馈模块:用于监测出砂模块的实际吹砂压力和实际撒砂流量并发送至撒砂控制模块以调整撒砂信号,反馈模块与出砂模块和撒砂控制模块采用的是电性连接。
在轨道车辆运用过程中,撒砂控制模块接受到撒砂指令后,自动计算出当前速度条件下对应的目标撒砂量和吹砂压力,并把目标撒砂量信号和吹砂压力信号分别转换为电机螺杆的转速信号和吹砂压力信号输出到出砂模块,当砂子撒出出砂模块后,反馈模块自动检测实际的撒砂流量和吹砂压力,并把实际的撒砂流量和吹砂压力以电信号的形式反馈至撒砂控制模块,撒砂控制模块将目标撒砂量信号和吹砂压力信号与反馈的实际撒砂量信号和吹砂压力信号进行比对,若超过允许的误差范围,则撒砂控制模块输出修正后的撒砂量信号和吹砂压力信号,从而使反馈信号与目标信号尽可能地保持一致。
2 智能化撒砂系统控制策略
轨道车辆在运用过程中,撒砂控制模块始终读取列车的速度信号,并判断是否接到了撒砂指令(注:撒砂指令既可设置为司机台撒砂按钮发出的撒砂硬线指令,也可与列车的安全回路联动,即当列车执行最大常用制动或紧急制动时,自动向撒砂控制模块发出撒砂指令),当接到撒砂指令后,撒砂控制模块开始发出控制撒砂量的信号和吹砂压力信号。
撒砂量的大小是通过控制电机螺杆的转速进行调节的,推荐的电机螺杆转速与当前轨道车辆的行驶速度的预设映射关系为:
当轨道车辆的行驶速度为V≤200 km/h时,电机转速为:N=K·V/S
(1)
当轨道车辆的行驶速度V>200 km/h时,电机转速为:N=[(K+B)·V-C]/S
(2)
式中:N——电机转速;
K——撒砂速度常数;
V——当前轨道车辆的行驶速度;
S——电机螺杆的每转撒砂量;
B——撒砂速度补偿常数;
C——撒砂量调节常数。
推荐的吹砂压力与当前轨道车辆的行驶速度的预设映射关系为:
P=R·V2+D
(3)
式中:P——吹砂压力;
R——吹砂压力常数;
V——当前轨道车辆的行驶速度;
D——吹砂压力调节常数。
由上述分析可知,智能化撒砂系统中,电机转速、吹砂压力分别和当前轨道车辆的行驶速度为线性关系,不同的行驶速度对应不同的电机转速和不同的吹砂压力,从而可根据当前轨道车辆的行驶速度实现对吹砂压力、电机转速的无级控制。
执行撒砂动作后,由反馈模块监测撒砂量和吹砂压力,并把二者的反馈信号反馈至撒砂控制模块,撒砂控制模块将反馈信号与目标信号进行对比,反馈的吹砂压力与目标压力允许误差范围为15 kPa,反馈的撒砂量与目标撒砂量对应的允许误差范围为20 g/min。若超出上述误差范围,撒砂控制模块将对电机转速或吹砂压力进行调整,直至反馈值处于目标值允许的误差范围内。
3 结论
本文提出一种轨道车辆用的智能化撒砂系统,主要包括撒砂控制模块、出砂模块和反馈模块,通过撒砂控制模块输出的电机转速控制信号和吹砂压力控制信号分别对撒砂量和吹砂压力进行控制,且设置了可监测出砂模块实际的撒砂量和吹砂压力的反馈模块,反馈模块可将所述反馈信号发送给撒砂控制模块并与目标撒砂信号相比较后进一步调整撒砂信号,以使所述反馈信号与撒砂信号相对应,进而提高了撒砂精度,进一步改善轨道车辆的轮轨黏着性能。避免了在轨道车辆低速运行时撒砂量过大或者高速运行时撒砂量过小的现象,并能根据轨道车辆的行驶速度有效地改善轮轨之间的黏着状态,从而可进一步地改善轨道车辆的轮轨黏着性能,提高了对砂子的合理利用,有利于节约资源和保护环境。
