基于矢量信号发生器的仪表着陆模拟器设计
2022-09-29董建涛
董建涛,赵 浩
(中电科思仪科技股份有限公司,山东 青岛 266555)
0 引言
仪表着陆系统(ILS)是国际民用航空组织规定的现代化机场所必须配备的一种地面无线电导航设备,作为一种新型的全天候机场进场引导精密设备,为等待着陆的飞机提供方位角、俯仰角以及距离等引导信息。仪表着陆系统由地面设备和机载接收系统构成,其中地面接收设备包含航向台、下滑台和指点标台,机载系统分为航向/下滑接收机和指点信标接收机。航向台提供一个通过跑道中心线的铅垂面,而下滑台提供一个与跑道平面呈固定角度的相交倾斜面,指点信标台提供距离检查点,利用两个平面相交的办法得到所需要的下滑线。
仪表着陆系统在军用和民用领域都有着广泛的应用,其工作状态直接决定飞机的着陆安全。仪表着陆模拟器是用来对机载仪表着陆系统工作状态检测的必要设备。由于传统的仪表着陆模拟器是专门研制的专用设备,其智能化程度低,通用性差,功能单一,无法灵活地针对特定场景进行配置和优化。针对这些缺点,本文设计了一种基于矢量信号发生器的仪表着陆模拟器,完全满足设计要求,在实际着陆设备测试中得到广泛应用。

图1 6939矢量信号发生器模块Fig.1 6939 Vector signal generator module
1 仪表着陆系统
仪表着陆系统是一种以仪表指针方式为飞行员提供航向道、下滑道信息的飞机进场着陆引导系统[1]。仪表着陆系统一般作为盲降系统,可以在飞行员无法目视到参考物时,为飞机降落提供进近的着陆通道,从而使飞机安全着陆。
仪表着陆系统通常采用两个独立的地面无线电发射装置,当飞机连同机载仪表进近过程中向飞行员提供左右方向和垂直方向的制导信号时,航向信标用来提供水平方向的航向引导,下滑信标提供垂直的方向引导,指点信标一般用于距离的引导。每一个子系统又分为两部分,一部分是位于飞机内部的机载接收设备,另一部分是位于地面的发射设备。机载设备的3个接收机,分别是甚高频航向接收机、超高频下滑接收机和甚高频指点接收机;地面发射设备与机载设备相对应,分别是甚高频航向台、超高频下滑台和甚高频指点台[2]。3个系统的引导信息分别指示飞机进近入场的不同反馈信息,从而帮助飞行员确保飞机安全着陆。
航向道由90Hz和150Hz两个信号调幅的载波组成,辐射两种特定幅度比例、相位关系的调幅信号,即载波加边带信号(CSB)和纯边带信号(SBO),在空间形成复合场型,此场型在跑道中心线左侧90Hz音频占优(即90Hz音频幅度大于150Hz音频幅度),在跑道中心线右侧150Hz音频占优,即90Hz音频幅度小于150Hz音频幅度;而在跑道中心线上两种音频的幅度应该相等,那么两种音频的调制度之差(DDM)应为0[3]。下滑与航向类似,航向道为水平方向,下滑道为垂直方向。在下滑道上两种音频的幅度应该相等,两种音频的调制度之差(DDM)应为0[3]。飞机通过机载的仪表着陆接收设备,接收地面导航台的航向信号和下滑信号,解算出DDM值,根据DDM值调整飞机着陆的方向,使飞机按照DDM接近于0的方向渐进着陆[4]。
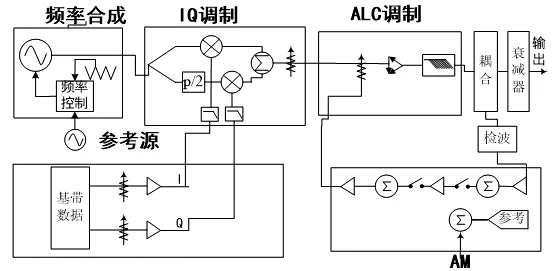
图2 矢量信号发生模块的硬件设计框图Fig.2 Hardware design block diagram of the vector signal generation module
2 模拟器设计导入
仪表着陆系统的地面台信号包括航向信号和下滑信号,共80个波道,载波的频道间隔最小仅有50kHz。其中,航向发射台的工作频率为108.10 MHz~111.95 MHz,共40个波道,90Hz和150Hz两者的调制度都是20%;下滑发射台的工作频率为329.15 MHz~335.00MHz,共40个波道,90Hz和150Hz两者的调制度都是40%;调制频率误差为1Hz,调制度的差值误差要小于0.001[4]。信号模拟器的输出功率在0 dBm~-115dBm,并且以1dB的步进量连续可调,误差±3dB[5]。
3 模拟器技术实现
3.1 矢量信号发生器硬件架构
针对仪表着陆信号模拟器的频率范围、调幅特性、调制度差值准确度指标等要求,采用电科思仪6939矢量信号发生器模块,如图1所示。它包括4个主要功能模块,分别是基带信号发生模块、频率合成模块、IQ调制模块和功率调理模块。该设备采用标准的3U 4槽PXI结构,具有250kHz~6GHz的多协议多制式信号发生功能,可实现模拟数字调制,任意波形发生和脉冲波形发生功能,广泛应用在车载、舰载和机载等对系统性能指标和移动性、便携性、坚固性要求较高的场合,其性能指标和功能也非常适合本项目的设计定位。
如图2所示,频率合成单元的参考信号由恒温晶体振荡器提供,从而确保产生所需要载波信号的温度稳定性。基带单元包括存储电路、FPGA、DA转换器和重构滤波器等电路,根据上位机设置的引导信号格式,在FPGA中产生I和Q正交数据(实际只采用一路数据即可),通过AD输出,从而合成仪表着陆音频调制信号,包括方位角信号、俯仰角信号、数据字等IQ信号;IQ调制单元主要由IQ调制器、带通滤波器以及功率调理电路组成,其中带通滤波器可以滤除调制和传输过程中的干扰信号。音频调制信号和载波混频后,在I/Q调制器内,再经过滤波,增益调整,偏置电压修正,差分转换等调整电路,产生所需的仪表着陆系统模拟调制信号[6]。最后,信号进入功率调理模块,利用自动电平控制(ALC)环路,实现稳定地输出功率控制,同时通过可编程衰减器,实现输出功率在大范围内连续可调和稳定地输出,并保证输出功率有较高的精度。
3.2 调制信号生成原理
仪表着陆信号是由90Hz与150Hz信号调制载波组成调幅信号。由于航向信号与下滑信号原理相同,都属于调幅信号,因而可以只对航向信号进行推理。
假 设SDM固 定40%;A150和A90分 别 为150Hz和90Hz信号的幅度;f150和f90分别为150Hz和90Hz信号的频率,fc为频率合成模块输出的载波信号。则航向信号的理论公式s(t)可表示为[3]:

对150Hz和90Hz信号的幅度之和进行归一化处理,即令A150+A90=1,则DMM=A150-A90。通过上面两式,计算可得:
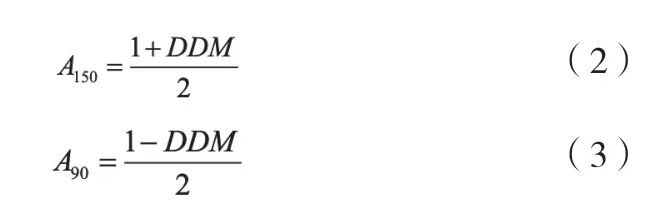
通过上位机发送DDM值,基于上面公式可计算出150Hz和90Hz信号的幅度[7]。根据公式(1),在FPGA内利用硬件描述语言,产生调制信号,其原理框图如图3。首先,将5MHz的参考时钟通过分频电路,分别产生150Hz和90Hz的正弦信号;通过上位机输入的DDM值分别计算得到A150和A90,经过乘法器对150Hz和90Hz的正弦信号进行调幅,分别滤波后,两者通过加法器相加,即可得到所需的基带调制信号。经AD输出后,通过IQ调制器与载波混频,就得到完整的仪表着陆航向信号波形序列。
3.3 软件设计
仪表着陆信号分析上位机软件设计,采用基于Windows操作系统和模块化设计思路[8],主要包括了3个功能模块,分别是总线驱动模块、ILS参数设置模块和ILS功能选择模块,软件方案框图如图4。在ILS功能选择界面,通过按键响应功能,进入到ILS参数设置模块,包括航线信号设置模块、下滑信号设置模块和其他辅助功能,然后可以进行相应的参数设置,如在不同功能下进行波导选择、DDM参数设置、校准补偿数据的管理等;最后,将上位机产生的参数控制信息,通过PXIe总线驱动程序输入到以高速FPGA为核心的基带信号发生单元,再通过JTAG接口下载到PFGA配置芯片中,从而产生所需要的制导模拟信号。
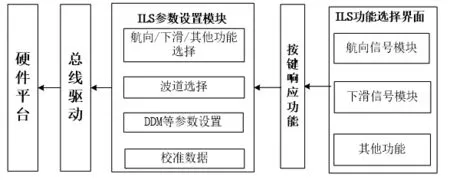
图4 软件方案框图Fig.4 Block diagram of software solution
在软件整体设计上采用模块化的设计思想,将整个软件系统根据功能划分为一系列功能相对独立的软件模块,对每个模块的设计采用自上而下、面向对象的设计方法,使各模块具有相对的独立性,以提高软件模块的可维护性和可扩展性,从而确保本设计的通用性。
4 试验结果
通过上述方案设计的仪表着陆模拟器输出的航线信号如图5。
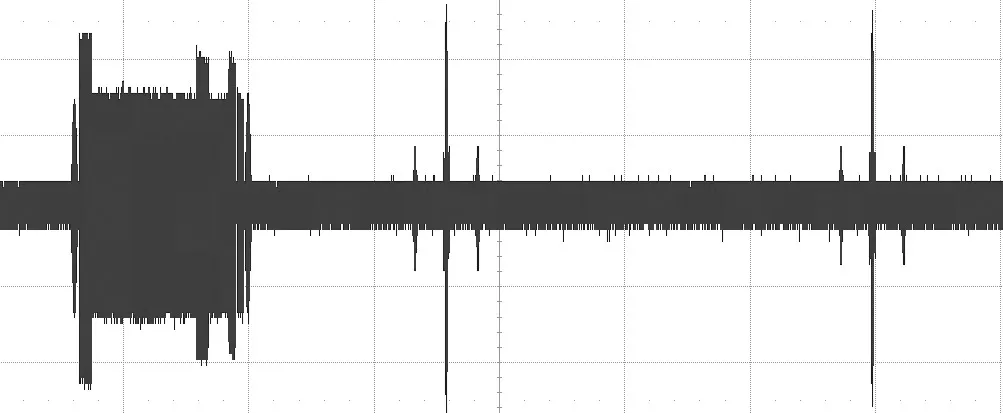
图5 仪表着陆的航向信号时域图Fig.5 Time domain diagram of heading signal for instrument landing
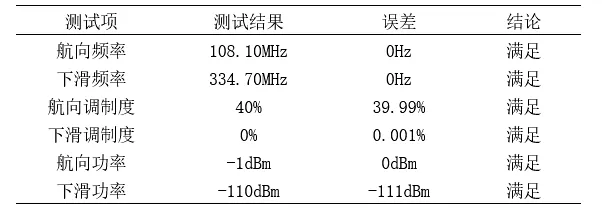
表1 仪表着陆信号模拟抽样测试结果Table 1 The results of the instrument landing signal simulation sampling test
随机抽取测试点进行测试,选取航向信号频率点108.10MHz,调制度40%,功率0dBm;下滑信号频率点334.70MHz,调制度0%,功率-110dBm,测试结果见表1,满足指标的要求。
5 结论
本文针对机载仪表着陆设备的测试需求,构建了基于矢量信号发生器的模拟器,利用矢量信号发生器的基带模块设计实现了复杂的仪表着陆模拟信号,利用频率合成模块实现了载波信号,并在IQ调制器中与基带信号进行混频。最后,利用功率调理模块实现了高精度、大动态范围信号的产生。本设计解决了专用维修设备功能专一、通用性差的缺点,同时该解决方案便于携带和外场使用,后续可以将微波着陆信号模拟器和仪表着陆模拟器集成到矢量信号发生器的硬件平台上,进一步提高通用性。
