气道打开体位自动调节装置的研制与初步应用
2022-09-28陈红梅罗艳吴俊李冬梅孙敏越杨相梅
陈红梅,罗艳,吴俊,李冬梅,孙敏越,杨相梅
1.重庆医科大学附属第一医院 呼吸与危重症医学科,重庆 400016;2.重庆市机电设计研究院有限公司,重庆 401147
引言
气道阻塞是导致院前和院内死亡的重要原因[1-3],也是急危重症患者抢救过程中必须优先处理的因素之一。无论是院内、院外或是战场急救[4],气道处理的首要步骤均为气道打开,以保持呼吸道通畅和呼吸支持的实施[5-6]。一旦气道打开失败,将会导致机体出现呼吸困难、严重缺氧、呼吸衰竭等并发症,致使心、脑等重要脏器不可逆的损害甚至危及患者生命安全。临床上常使用人工方法打开气道,但相关研究结果显示,人工方法虽然简便却存在打开手法错误、打开不彻底或无效等问题[7-9]。基于此,本研究研制了一种全新的气道打开仪器(国家发明专利号:ZL 2019 1 0582372.2),主要用于代替人工方法,以实现安全无创、自动、及时、准确地打开气道,并维持气道处于持续打开状态,以减少或避免气道打开错误、不彻底或无效等问题,探究其在心肺复苏、气管插管、气管镜检查或治疗等患者中的应用效果。
1 工作原理
气道打开体位自动调节装置的总体工作原理是通过仪器调整患者的体位打开气道,该仪器的整体研制理论背景分为心肺复苏和气管插管打开气道两部分,具体为心肺复苏开放气道标准,即外耳道与下颌角的连线与水平面垂直理论;气管插管的经典三轴论、嗅物位和斜坡位理论,理论核心在于人体头颈位置的正确摆放。气管插管的三轴论是Bannister等[10]于1944年首次提出,即“三轴线合一理论”(Three Axis Alignment Theory,TAAT),其认为口、咽和喉三轴线重叠时,可实现最佳声门暴露,此时便标志着气道打开成功。嗅物位(Sniffing Position)为在患者枕后或肩部垫7~10 cm的枕头或毯子使头部后仰15°和颈部前屈35°,达到三轴线重叠的目的,常规认定其为喉镜下气管插管的首选体位[11-12]。有研究发现,针对肥胖患者,斜坡位(Ramped Position)可能会表现出良好的声门暴露能力,有利于气管插管和通气,其体位标准为在保持嗅物位的基础上,将患者的上半身抬高至外耳道与胸骨角水平对齐或床头抬高20°~25°[13-14]。根据本课题组前期研究可知,患者正确的体位是决定气道打开是否成功的重要因素之一[15-16]。因此,本研究选择以心肺复苏和气管插管打开气道的相关理论作为研制背景具备可靠性和合理性。
2 仪器结构与组成
气道打开体位自动调节装置采用移动式结构设计,主要结构由机械和电控两部分组成。机械部分由头槽、头部测控装置、颈托、颈部升降装置、人体背板、水平底板和电动定位调节装置组成;电控部分由操作控制台、可编程序控制器(Programmable Logic Controller,PLC)和定位控制系统构成。其中,操作控制台设有PLC控制器、触摸液晶显示屏和电源。使用人员可在显示屏的操作界面进行参数调节,其包括了手动高度功能、自动高度功能、自动角度功能、辅助角度功能和帮助等参数设置选项。头部测控装置包括环套、定位基准板和动态倾角传感器(SDA126T-90-485、SN 01819100183)。环套便于头部测控装置能与人体头面部紧密接触、贴合和固定,定位基准板与动态倾角传感器的主要功能为测量人体下颌角至耳垂与该装置水平面之间的角度(下颌角度)。头槽下方设置有与人体纵向平行的导轨,可配合头槽滑动使用,且可跟随人体头部的前后移动发挥良好的支撑作用。颈部升降装置和电动定位调节装置联合在一起,主要包括托板、颈托、导向柱、杠杆和电动缸。颈托的主要作用为保护颈椎。托板上设置有电动缸,且端部穿在导向柱上并配合其上下滑动;杠杆的一端位于托板下方,另一端上设有滑槽;电动缸的伸缩杆端部设有传动销,位于电动定位调节装置的滑槽里。电动定位调节装置采用电动缸控制,其设定、测控角度和高度的方式由PCL控制器进行。人体背板通过插销与颈部升降装置的托板铰接,可以选择插上插销使背板与升降装置联动,也可取下插销使背板与该装置底板水平对齐。颈部升降装置、电动定位调节装置和人体背板联动使用,它们的主要功能为通过抬高或降低人体背部使人体头部后仰、颈部伸展,从而精准摆放其头颈位置,实现气道打开的目的,结构示意图如图1所示。
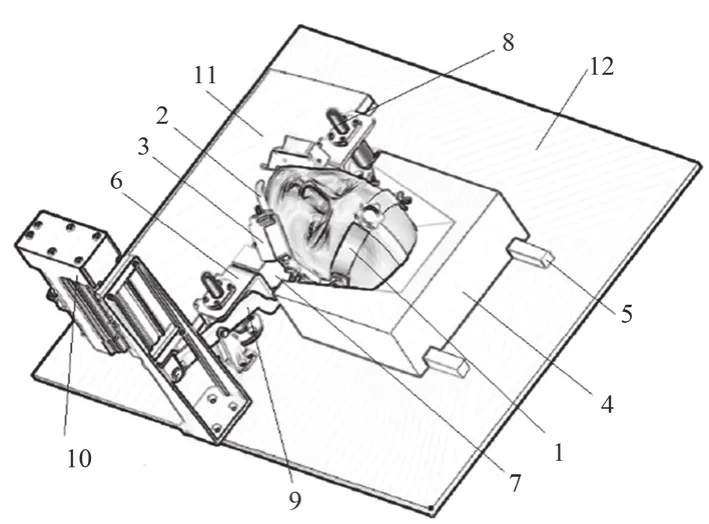
图1 气道打开体位自动调节装置结构示意图
气道打开体位自动调节装置的传动机械材料为304不锈钢材料,水平底板为聚四氟乙烯材料,头槽和人体背板表面覆盖聚酯纤维材料。气道打开体位自动调节装置实物的型号为YT/QD-100Z,电压为220 V,频率为50 Hz,功率为300 W。其中,该装置的机械部分的长×宽×高为65 cm×54 cm×40.5 cm,重量为25 kg;电控部分的长×宽×高为42.6 cm×37.8 cm×6.5 cm,重量为8 kg,实物图如图2所示。
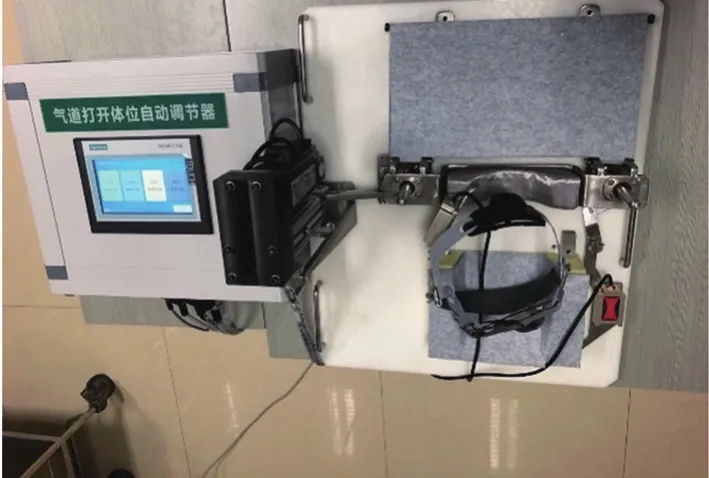
图2 气道打开体位自动调节装置实物图
3 仪器功能特性
依据整体的研究设计原理与理论基础,气道打开体位自动调节装置实现气道打开的方式为自动和/或手动调节装置的角度值和/或高度值,因为此操作可以使患者头部后仰、颈部伸展和肩背部抬高,从而改变体位打开气道。其中,自动调节角度值和高度值的方法为通过该装置操作控制台上触摸液晶屏的自动角度或高度功能选项,设置体位夹角或背板高度等参数,使其自动达到所需的角度值或高度值。手动调节方法为选择触摸液晶屏上的手动角度或高度功能选项,在其上升或下降界面进行手动操作实现角度值或高度值的微调,从而达到所需的参数值。因此,气道打开体位自动调节装置具有以下几方面的性能,见表1。
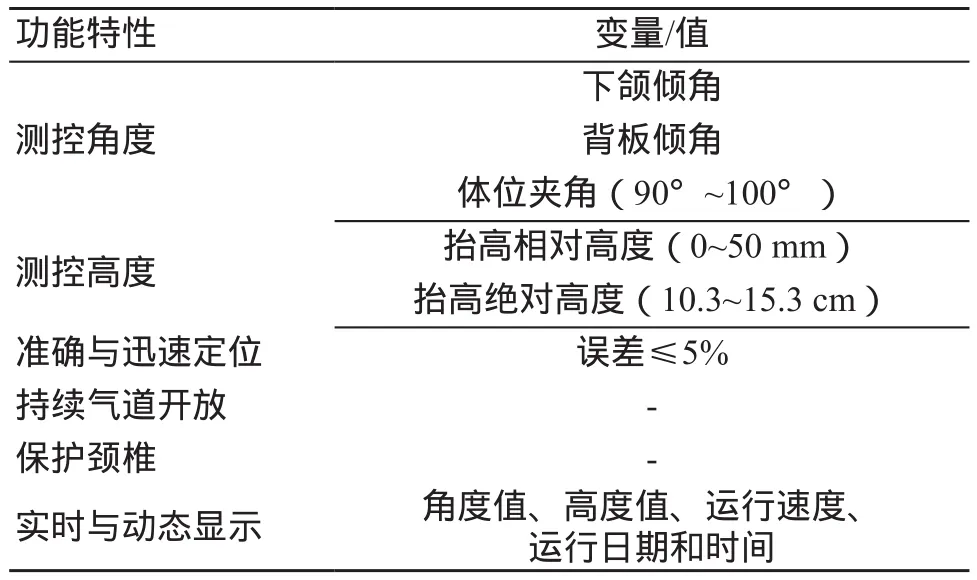
表1 气道打开体位自动调节器的功能特性
3.1 测控角度
气道打开体位自动调节装置能测量和控制三个重要的角度值,包括下颌倾角(通过头部测控装置的动态倾角传感器测量下颌角到耳垂与该装置水平面之间的角度)、背板倾角(人体背板与该装置水平面之间的角度)以及体位夹角(背板与下颌倾角端面投影线之间的夹角)。由于体位夹角的形成与下颌倾角和背板倾角两者密切相关,所以应用该装置打开气道时自动和/或手动调节的角度值应为体位夹角的度数值。根据研究设计理论中的外耳道与下颌角连线与水平面垂直理论(近似90°),再结合装置的实际角度测量值,本研究明确该装置体位夹角的角度值预设范围为90°~100°。医务人员还可以在触摸液晶显示屏的自动角度功能选项处提前自定义几个常用的体位夹角度数,如90°、95°和100°,使操作更简便、快捷。另外,本装置中的角度测控装置已成功获批一项国家实用新型专利(专利号:ZL 2020 2 2557959.9)。
3.2 测控高度
气道打开体位自动调节装置能测量和控制背板抬高或下降的相对高度(背板相对于其初始位置抬高或下降移动的距离)。因此,应用该装置打开气道时自动和/或手动调节的高度值是指背板移动的相对值。背板相对抬高的范围为0~50 mm,对应情况下其绝对抬高(装置背板到水平底板的距离+底板本身的高度)的范围为10.3~15.3 cm。背板抬高范围的限制主要是为了避免因过度抬高患者的肩背部,导致其出现不良反应和妨碍其他临床操作的实施。
3.3 准确与迅速定位
气道打开体位自动调节装置采用设定误差值自动跟踪方式进行偏差控制,确保其下颌倾角、背板倾角、体位夹角和背板抬高高度的预设值与实际测量值之间的误差≤±5%。另外,医务人员还可以设置该装置达到所需角度值和/或高度值的运行速度,便于自行控制体位摆放和打开气道的时间。该装置的运行速度为0~20 mm/s,到达最高行程50 mm所需时间仅为2.5 s,故如遇临床紧急情况发生时,可采用最大运行速度来缩短打开气道的时间,为后期其他临床操作节约时间。因此,该装置可通过准确定位所需的角度值和高度值及时有效地打开气道,避免或减少因气道打开不及时、不彻底或无效而造成的相关损伤。
3.4 持续气道开放
当医务人员自动和/或手动调节装置的角度值或高度值打开患者的气道后,在不改变这2个值大小的情况下,可以维持气道处于持续开放状态和维持气道通畅,以减少与优化多次人工气道打开的流程、节约人力资源和时间、缓解医务人员疲劳,以及有利于其他临床操作的实施。
3.5 保护颈椎
气道打开体位自动调节装置的颈部升降装置上配备一个柔性颈托,其作用为支撑患者的颈部、保护颈椎的安全及增加舒适性。
3.6 实时与动态显示
气道打开体位自动调节装置测量的角度值、高度值、运行速度、运行日期和时间都将实时与动态地显示在触摸液晶显示屏上,以便于医务人员及时观察、记录和调整这些重要的参数。
4 方法
4.1 应用对象
2020年10月选取15名重庆市某高校医学院学生作为操作者,受试对象为同一个心肺复苏人体模型(全身复苏安妮,171-01250+170-3005)。纳入标准:① 年龄≥18岁;② 正处于在校学习阶段的本科临床医学生。排除标准:① 同时参与其他研究;② 拒绝签署知情同意书。本研究方案和知情同意书已通过医院伦理委员会的审查(伦理号:20205401),并已获取所有研究对象的知情同意书。研究地点为重庆市某三甲医院的临床技能实验教学中心。
4.2 应用方法
研究开始前,所有招募的操作者将统一接受该装置操作和简易呼吸器通气操作[17-18]的规范化培训,结合理论学习和操作指导两种形式,培训时间为持续30 min。培训完成后,操作者被允许练习上述操作,在培训考核合格后正式参与研究。其中,培训和考核均由1名中级职称、具备丰富临床实践和教学经验的护士进行。
本研究包括3种不同的干预措施:① 在气道打开体位自动调节装置体位夹角90°下打开心肺复苏人体模型的气道;② 在该装置体位夹角95°下打开气道;③ 在该装置体位夹角100°下打开气道。上述这3种不同打开气道的干预措施分别被定义为装置90°组、装置95°组和装置100°组。
研究具体实施过程:依据成人心肺复苏指南规范的按压和通气比为30∶2[5],本研究规定每名操作者按照计算机产生的随机顺序先后在3种干预措施下打开人体模型的气道1次,然后再使用同一个简易呼吸器(成人型,SI型,20203204,厦门天祚医疗科技有限公司)对此人体模型连续进行2次通气,见图3。采用随机顺序由1名独立研究者生成,其不参与研究对象的纳入与试验过程,以及随机结果被保存在密封、不透明的信封,操作者成功入组后再揭晓其顺序。此外,因心肺复苏常规要求实施5个C-B-A循环,故每名操作者还需重复5次上述研究过程,即1名操作者在1种干预措施下共需重复进行5次气道打开和10次通气操作,3种干预完成共需进行15次气道打开和30次通气操作。每组的气道打开和通气完成后,操作者均休息2 min。

图3 气道打开体位自动调节装置打开模型气道和通气
4.3 评价指标与资料收集方法
研究主要结局指标为人体模型测得的通气成功率。通气成功率=通气成功总次数/通气总次数。测量通气成功次数的主要方法为由2名研究人员根据人体模型配备的SkillGuide电子显示器(Cat.No.170-30050,Laerdal有限公司,挪威)显示的通气成功次数进行观察和记录,次要方法为观察人体模型的胸廓是否有明显起伏。
4.4 统计学分析
所有数据均由双人收集和录入到Excel 2016表中,采用SPSS 25.0软件进行统计分析。符合正态分布的计量资料采用±s进行描述,若不符合正态分布的数据则用中位数(Median,M)和四分位数间距(Interquartile Range,IQR,Q1-Q3)表示。组间比较采用非参数Friedman检验,以P<0.05表示差异有统计学意义。
5 结果
5.1 一般资料分析
本研究共招募了重庆市某高校15名在校大三的医学院本科学生,均为女性,年龄集中分布在21(19~22)岁。所有操作者的装置操作和简易呼吸器通气操作经培训后均合格。15名操作者均顺利完成试验,因此共有15份试验数据被纳入统计分析。
5.2 3组该装置测量角度值和高度值的分布情况
因1名操作者需重复进行5次气道打开,所以在该装置1组干预措施下,1名操作者便有5次实际的角度和高度测量值,即该装置每组共有75次实际角度和高度的测量数据。该装置3组的实际下颌倾角值、背板倾角值、体位夹角值和背板相对抬高值的分布具体情况如表2所示。

表2 3组角度和高度测量值的分布情况
5.3 3组间通气成功率的比较
每种干预措施下,每位操作者共进行了10次通气操作,故每组总共有150次通气次数。分析结果显示,装置90°、95°和100°时的通气成功总次数分别为133、134和132次,通气成功率的中位数分别为100%(70%~100%)、90%(80%~100%)和90%(70%~100%),见表3,经统计分析,3组通气成功率比较差异无统计学意义(χ2=0.634,P=0.728)。

表3 3组间通气成功率的比较(%)
6 讨论
6.1 气道打开体位自动调节装置的新颖性
气道打开体位自动调节装置是一个自动、无创、操作简便的仪器设备,且其性能已通过重庆市医疗器械质量检验中心的检测(报告编号:WT202118),表明该装置的功能特性较好,符合产品设计技术标准的要求。气道打开体位自动调节装置具有多种特性,均来源于其设计理论和方案要求,同时服务于其性能的实现。一方面,该装置具备多角度测控、动态倾角传感、自动偏差跟踪、自动或手动调节、参数值实时显示、触摸液晶屏设定和记忆角度、PLC控制、混合材料组成、色彩搭配适宜等特性;另一方面,该装置具有测控角度、测控高度、准确与迅速定位、持续气道开放、保护颈椎、实时与动态显示的多个性能。同时,本研究的装置也是因为拥有上述多种个性与功能,才能有别于其他气道打开设备,如Deshpande等[19]研制了一种通过模仿托下颌动作打开阻塞气道的装置,将该装置应用于人体模型,简单地验证了其打开气道和保持气道通畅的功效。Lubovsky等[20]以下颌推动打开气道为基础,再结合颈托,研发了一个既可以打开气道又可以保护颈椎的新设备,该设备经临床应用于气道阻塞患者,证明了该设备可以安全、有效地打开伴有脊椎受伤和/或气道阻塞昏迷患者的气道。von Goedecke等[21]制作了一种推下颌以维持气道通畅的装备,其经过面罩通气,发现该装备应用于临床是安全有效的。颜勇军等[22]以托下颌法为原理,自制了一种下颌提升固定器,经临床应用于纤支镜诊治患者,发现该固定器可以有效代替人工托下颌法。窦林彬等[23]也研制了一种可以固定和托起下颌的装置,主要解决下颌松弛和舌后坠等问题,经临床实践发现,该装置可以打开气道阻塞患者的气道。此外,Cattano等[24]针对肥胖患者在直接喉镜下行喉镜检查或气管插管困难的情况,以斜坡位为基础,研发了一种定位器,旨在优化声门视野和促进气管插管。
本研究装置与上述设备既有相似之处又有不同之处。相似之处主要在于共同目的均为打开气道和保持气道通畅;不同之处主要在于本研究装置的研制背景理论丰富又不单一,功能更为全面、适用范围更广,而不仅局限于某一特殊人群。同时气道打开体位自动调节装置是首次被提出和研发生产,具有一定的创新性和独特性。
6.2 气道打开体位自动调节装置的有效性
研究表明,气道打开体位自动调节装置可以有效地打开心肺复苏人体模型的气道,无论其体位夹角为90°或95°或100°,打开模型气道后的通气成功次数均较理想,通气成功率也较高。既往研究发现,人工方法开放气道存在开放手法错误、打开气道不彻底或无效[7-9]等诸多不足,延误治疗或抢救进程,威胁患者生命安全。而本研究研制的气道打开体位自动调节装置是由机械控制自动打开气道,不需要人工手法去打开气道,可以缓解医护人员疲劳,且气道打开的过程更加安全、高效与准确[19-20]。
6.3 本研究的优势和局限性
本研究存在以下几点优势与局限性。本研究的优势为:气道打开体位自动调节装置是研究首次自主研发的全新医用设备,具有一定的创新性和实用价值。本研究的局限性主要在于:① 样本量少。本研究是一项初步应用研究,仅招募了15名操作者,未来研究应扩大样本量继续进行探索。② 缺乏对照组。本研究只针对气道打开体位自动调节装置3组不同体位夹角进行了试验,但未设立人工方法打开气道进行对照,即不能具体明确该装置与人工相比打开气道的优劣性。③ 未开展临床人体试验研究。本研究结果表明,气道打开体位自动调节装置有较好的气道打开后通气效果,但仅能初步证明该装置能实现打开人体模型气道的功能,能否有效打开真实人体的气道还需进一步研究。研究表明,人体模型与真实人体在气道解剖结构和力学特性方面存在一定的差异[25-26],具体表现在组织硬度、颈椎活动度、解剖比例,如咽腔和腭后区域,尤其是人体模型还存在明显的固有气道阻力和气道死腔[27-28]。先前也有学者提出和建议在评估一种新的气道设备的有效性与安全性时,应分为3个阶段先后进行研究,其中第一个阶段便是人体模型试验[29-30]。因此,本试验具有一定的临床参考价值,并为下一阶段的大样本的临床随机对照试验研究提供了重要参考资料与循证依据。同时本研究装置不够轻便、不易携带、不能蓄电等,未来应对其存在的不足进行完善、改进和优化。
7 结论
气道打开体位自动调节装置是一种自动、无创、操作简便、多功效、多特性的新型创新医用设备,可通过自动调整体位有效地打开人体模型的气道,并维持气道处于持续打开的状态,减少或避免人工打开气道错误、不彻底或无效等问题。未来的研究还应进一步探索并验证气道打开体位自动调节装置在真实人体上的安全性与有效性。
