服务机器人与铁路客运站既有系统设施融合应用的设计与实现
2022-09-27戴彦华陈天煜李全印
戴彦华,陈天煜,支 涛,李全印
(1.中铁电气化局集团有限公司 城铁公司,北京 100036;2.北京云迹科技股份有限公司, 北京 100190)
随着计算机、信息通讯、大数据、智能传感等科学技术的不断发展、融合以及在机器人领域的应用,服务机器人产业呈现出快速发展的趋势。《国民经济和社会发展第十四个五年规划和2035年远景目标纲要》和《“十四五”智能制造发展规划》提出推进智能制造,发展机器人创新产品。铁路客流量上升和突发性客流的产生,使得许多铁路客运站的客流组织难度增加,服务效率下降。由于新建和改扩建的投资大、周期长,且受许多城市总体规划的限制,不少新老客运站,尤其是大型客运站尝试采用服务机器人来提高服务效率[1]。目前,在广州南站、上海虹桥站、郑州东站、大连北站等铁路客运车站内,已展开服务机器人的应用,但其功能相对单一[2],仅用做资讯服务,尚未实现与既有系统及设施的物联互通。如果能够充分利用车站既有的设备设施进行服务联动,将起到事半功倍的效果。随着5G的发展,万物互联成为了新的发展方向,物联网(The Internet of things)是通过射频识别(RFID)、红外感应器、全球定位系统、激光扫描器等信息传感设备,按约定的协议,把物品与互联网相连接,进行信息交换和通信。与物联网技术结合是服务机器人发展的必然方向,通过物联,机器人可以作为后台系统的终端触手,优化补充系统能力,还可以作为前端设备的扩展后台,结合机器人服务的主动性、灵活性,实现系统的集成共享与联动,减少旅客的重复操作,为铁路客运站的信息传播、服务提升提供更多帮助。
1 与实名制进站核验系统的融合分析及方案
北京冬奥会采取三赛区联动,各国运动员、旅客频繁进出站的需求大,乘车高峰期车站面临检票口闸机数量短缺,而空闲检票口闸机闲置的情况。因此,为了提高检票系统的复用率,同时为冬奥旅客带来更简单便捷的进站体验,提出将机器人与实名制进站核验系统相融合。通常来说,每一位旅客进站乘车需要经过下列几个过程:安检→人脸识别、人证比对(闸机)→乘坐直梯、扶梯到达指定候车区域→身份证验检票(闸机)→乘车[3]。 在车站的全过程中,选取了实名制进站核验系统、通道门、直梯进行物联及功能集成,使旅客可以通过机器人完成“票、证、人”一致性核验、检票口验票,通过物联通道门,实现“票、证、人”一致性核验成功后放行操作,并且与直梯进行物联,使机器人更好地在多层车站运行,在扶老助残、引导携带大件行李旅客等方面提供更好的服务。
1.1 分析与设计
目前,基于“票、证、人”一致性的要求,各大客运站基本都在进站口设置了实名制验证闸机,通过铁路实名制进站核验系统进行“票、证、人”一致性核验,同时将旅客实名信息实时发送至铁路客票实名信息公安核验系统[4],通过集成扫码模块和证件识读模块,替代闸机帮助旅客进行“票、证、人”一致性核验及检票口验票,保障了铁路旅客运输整体环境的安全。
1.2 方法研究
步骤一:机器人通过集成的证件识读模块读出旅客身份证信息送到检票服务器,检票服务器根据身份证信息判断是否购买电子票,同时判断是否在允许进站时间范围内[5]。
步骤二:若允许进站,则机器人通过前端针孔摄像头进行身份证和人脸核验,核验通过则机器人屏幕显示相应通过信息,联动通道门开门,若核验失败,则提示旅客进行人工核验[6]。
步骤三:在核验过程中无论是否核验通过,都将身份信息和车票信息发到公安核验系统进行重点人员监测,是否为重点人员不影响验票是否通过[7]。
1.3 架构
实名制进站核验系统运行在客票网内,以服务调用方式实现与客票系统的电子票查询接口。以旅客身份证号和乘车日期为条件,访问中国国家铁路集团有限公司(以下简称“国铁集团”)导航表集群查询服务,获取满足条件的电子票库节点列表,再访问国铁集团电子票库节点查询服务,获取满足条件的铁路电子票具体车次、席位等信息。通过铁路客票数据服务网闸,实现与公安网的加密数据安全传输[8]。
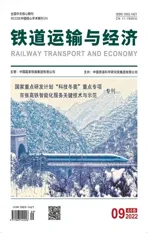
在与实名制进站核验系统的融合中,机器人集成扫码模块和证件识读模块,通过证件识读模块读出二代居民身份证、护照等有效旅客证件信息,通过站车交互网传输至检票服务器,检票服务器根据身份信息判断是否购买电子票,同时判断是否在允许进站时间范围内,允许进站则进行身份证和人脸核验[9]。人脸核验时,机器人通过前端针孔摄像头,采集旅客人脸动态视频,为了保证识别准确率和识别效率,针对采集到的人脸动态视频完成人脸检测、跟踪、校正、分割等初步处理环节,并可根据系统性能及识别准确率的要求,设定采集频率、图像清晰度、图像分辨率等采集参数。之后通过公安联网控制设备, 将“票、证、人”信息及比对状态信息, 实时传递到公安后台系统[10],提高“票、证、人”一致性核验及检票口验票的效率。机器人与实名制进站核验系统融合架构图如图1所示。
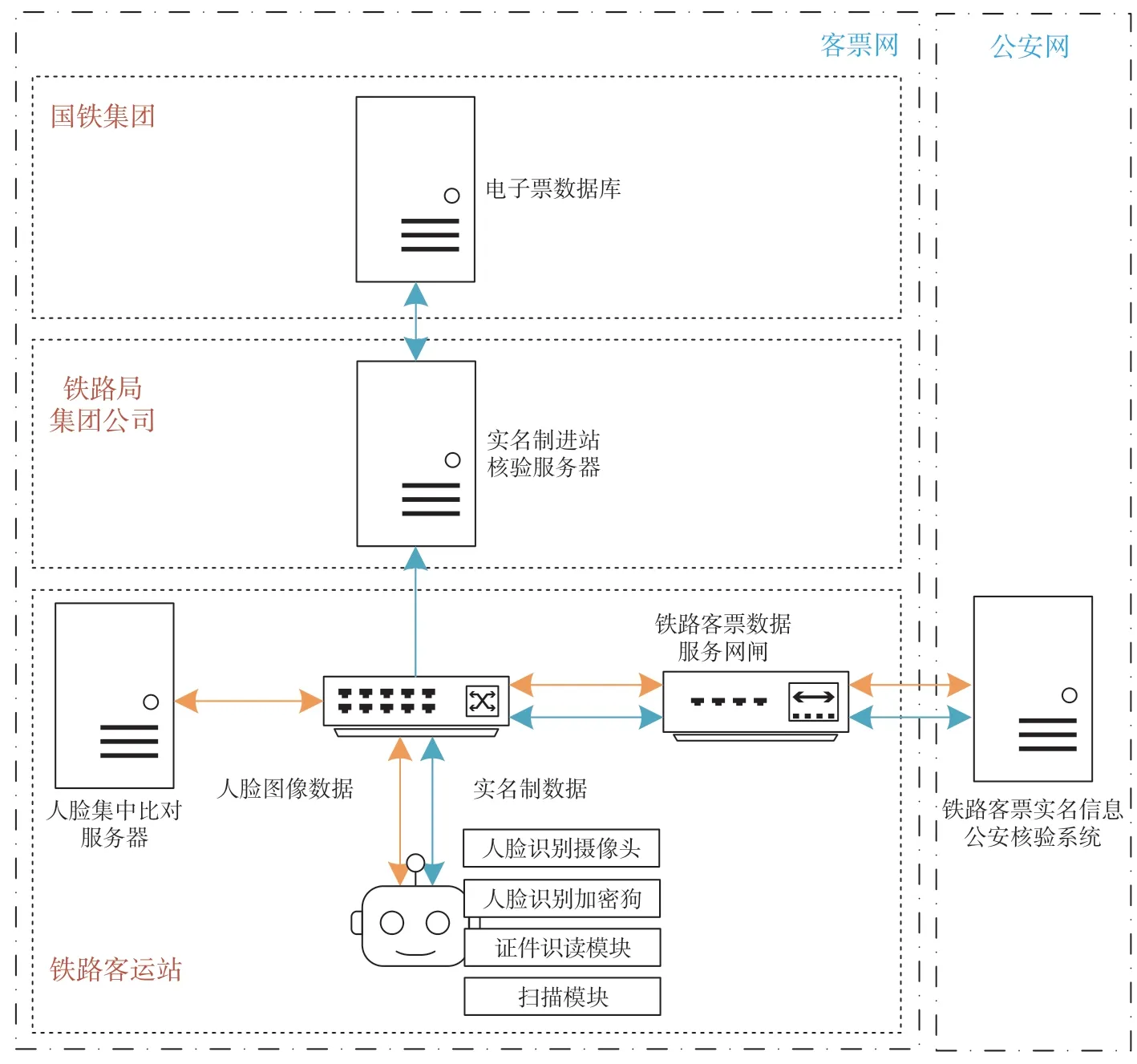
图1 机器人与实名制进站核验系统融合架构图Fig.1 Integration architecture of robot and real-name registration system
2 与通道门的物联融合分析及方案
2.1 分析与设计
铁路客运站检票处的通道门,多数采用平开式半身门,仅能通过服务人员手动开关门,安全性低,不方便管理,也缺少与其他智能设备物联的手段。通过对通道门的改造与物联,提升车站设备设施的智能化程度,有效利用站内设备设施资源,拓展机器人服务区域。
2.2 方法研究
步骤一:机器人通过LoRa或4G网络向开门控制器发送包含机器人编号、被引导人员数量信息的开门信号。
在实施中,服务人员可通过门禁卡或开门开关出入,不影响服务人员工作,机器人与开门控制器的通信采用双链路保证措施,对传输信号采用AES128加密,门禁系统根据判断的结果完成开锁或保持闭锁。
步骤二:开门控制器向对应电锁发送解锁信号,向曲臂开门器发送曲臂开门信号,门体打开。
在实施中,机器人通过激光导航及避障技术自动识别门体的开关状态,在门体打开后引导旅客先后通过通道门。
步骤三:机器人和被引导人员通过后,开门控制器向对应电锁发送闭锁信号,向曲臂开门器发送伸臂关门信号,门体关闭。
在实施中,传感器根据机器人发送的被引导人员数量识别通过人数,当人数达到上限或指定时间后,开门控制器向对应电锁发送闭锁信号,门体关闭。
例如,机器人帮助1名乘客完成“票、证、人”一致性核验后,该乘客选择自行前往检票口,机器人向开门控制器发送1人的开门信号,门体打开后乘客通过通道门,传感器感应到1名人员通过后,门体关闭。
2.3 系统架构
在与通道门的物联中,首先将通道门加装电锁、曲臂开门器,接入电源及开门控制器后,将原有的简易通道门改装为带门禁的自动门,服务人员可通过门禁卡或开门开关出入。
机器人通过通信模块与开门控制器建立通讯连接,开门控制器通过将开锁线并接到自动门解锁线路,来控制电锁打开,将开门线并接到自动门控制曲臂线路,来控制曲臂开门机屈伸,开门控制器根据提前配置的机器人引导规则和权限判断是否允许机器人通过,根据结果完成开锁、保持闭锁的动作。传感器识别相应人员数量通过后,开门控制器发送关门信号,门体关闭。同时机器人向后台传送进出通道门的人员信息记录。
开门控制器和机箱电源控制器也接受来自管理计算机发送的人员信息和相对应的授权信息,保证紧急情况时能迅速地打开通道,实现在客流拥挤的时间段,更好地利用站内设备设施资源进行旅客引流及服务。机器人与通道门改造融合架构图如图2所示。
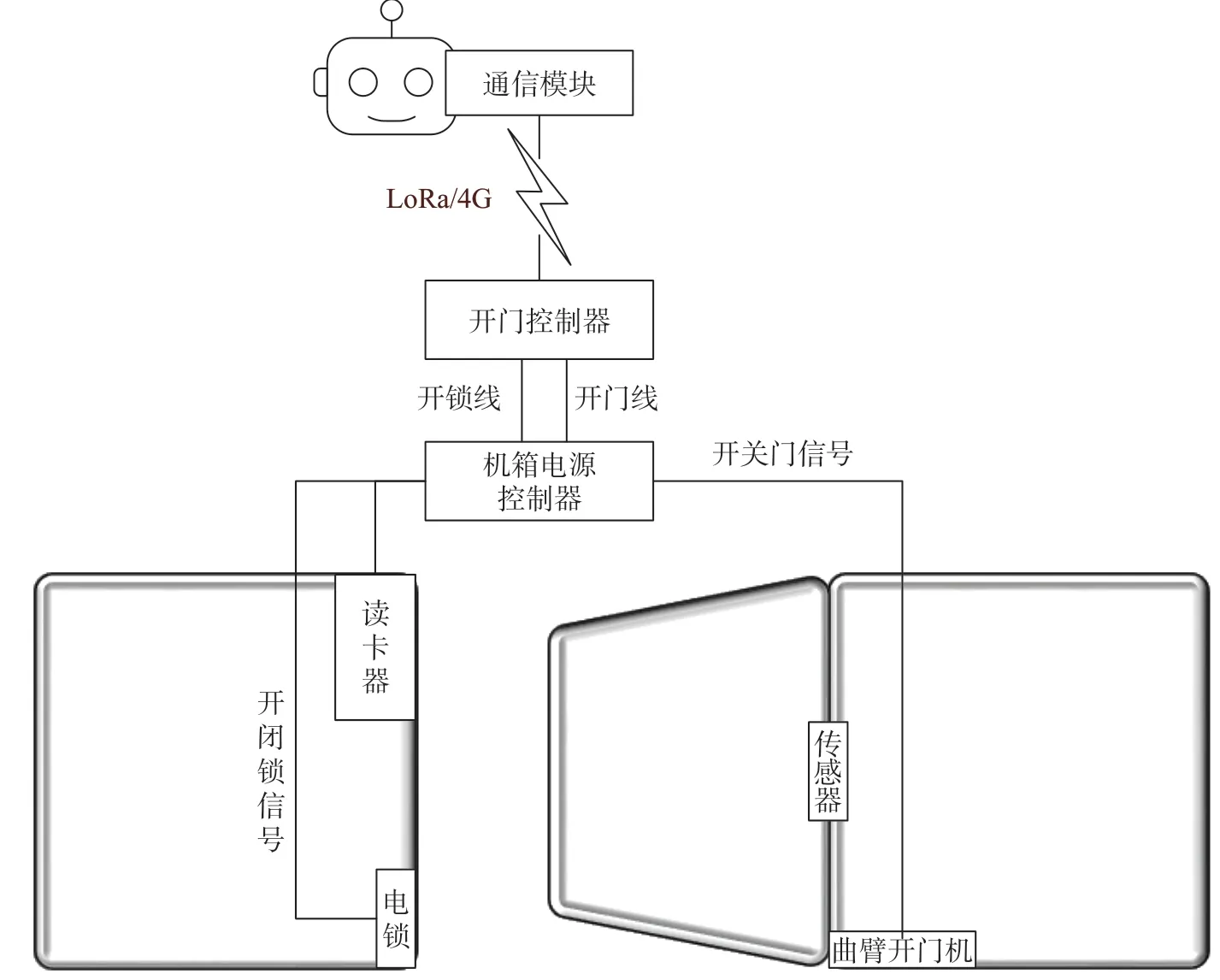
图2 机器人与通道门改造融合架构图Fig.2 Transformation and integration architecture of robot and access door
3 与直梯的物联融合分析及方案
3.1 分析与设计
多数大型铁路客运站采用多层建筑结构,将安检区与候车区设计在不同的楼层,利用直梯、扶梯连接不同区域。与直梯的物联,实现机器人为旅客提前呼叫直梯、自动跨越不同楼层,提高机器人的使用场景和范围。
3.2 方法研究
步骤一:机器人通过站车交互网向后台服务器发送包含用户识别码、出发楼层和目的楼层的乘梯请求,以使后台服务器根据用户识别码、出发楼层和目的楼层对直梯进行调度,并反馈直梯的直梯识别码。
在实施中,用户识别码可以是机器人的编码,也可以是存储在机器人的本地存储器中的编码,该编码可以对应该机器人所在区域位置,后台服务器在接收到该乘梯请求后,可以根据用户识别码确定该机器人所属的区域位置,根据出发楼层和目的楼层对该区域位置中的直梯进行调度,并将该直梯的直梯识别码反馈给机器人,以使机器人确定响应该乘梯请求的直梯,便于机器人后续乘梯。
步骤二:机器人根据接收到的直梯识别码与直梯建立通讯连接,以使直梯反馈运行状态信息。
在实施中,机器人在接收到直梯识别码后,可以确定响应乘梯请求的直梯,进而根据该直梯识别码与该直梯建立通讯连接,在机器人和直梯建立通讯连接后,直梯将运行状态信息发送给机器人,该运行状态信息包括直梯所在楼层、运行方向、直梯门开关状态等,使得机器人可以实时获取直梯所在楼层以及直梯门的开启状态,为乘梯做数据准备。
步骤三:机器人根据接收的运行状态信息乘梯,在出发楼层进入直梯或在目的楼层离开直梯。
在实施中,机器人接收到运行状态信息后,当确定直梯已经到达出发楼层,且直梯门已经处于打开状态后,即可以进入该直梯内部。之后,机器人根据该直梯反馈的运行状态信息确定直梯已经到达目的楼层,且直梯门已经处于打开状态后,即可以离开该直梯,进入目的楼层,从而完成乘梯作业。
例如,机器人出发楼层为2楼,目的楼层为3楼,该直梯目前在3楼且向1楼运行,这样,确定的运行顺序即为直梯由3楼至1楼后,向上运行,到达2楼后,向机器人反馈该直梯到达2层,机器人进入直梯、随直梯再上到3楼,直梯停止运行,并打开直梯门,机器人接收到该反馈的运行状态信息后,离开直梯。
3.3 系统架构
在与直梯的物联中,机器人包含发送模块、链接模块和乘梯模块。发送模块用于向后台服务器发送乘梯请求,以使后台服务器对直梯进行调度;链接模块用于根据接收到的直梯识别码与直梯建立通讯连接,以使直梯反馈运行状态信息;乘梯模块用于根据接收的运行状态信息进行乘梯,从而在出发楼层进入直梯以及在目的楼层离开直梯。
后台服务器包含接收模块。接收模块用于接收机器人发送的乘梯请求,并反馈直梯的直梯识别码。
直梯包含确定模块和发送模块。确定模块用于确认接收到通讯请求,并建立连接;发送模块用于将运行状态信息反馈给机器人,使机器人根据接收的运行状态信息进行乘梯。
通过机器人与直梯的物联,达到了通过通信互操作实现机器人自动乘梯的目的,进而提高机器人的使用场景和范围。机器人与直梯物联融合架构图如图3所示。
图3 机器人与直梯物联融合架构图Fig.3 Integration architecture of robot and elevator
4 应用分析
4.1 引导步骤及流线
在旅客进入铁路客运站,通过安检后,旅客可选择与机器人交互,将二代居民身份证、护照等有效旅客证件放置在机器人的证件识读区域,通过机器人进行“票、证、人”一致性核验,机器人识别旅客票证信息后,对旅客进行人脸信息采集并发送至铁路客票实名信息公安核验系统,在比对成功后,显示相应通过信息,通过物联打开通道门,引导旅客进站,同时对旅客全流程追踪。帮助旅客提前呼叫直梯,到达指定候车区、检票口或旅客通过交互指定需要到达的其他点位,若到达的区域为检票口且满足检票条件,旅客可通过机器人进行验检票操作,机器人将旅客票证信息传输至检票服务器核验,核验通过后机器人显示相应通过信息并物联打开通道门,完成全流程引导。若旅客在引导过程中离开,机器人重新回到初始位置工作。旅客的引导前置条件、流程、目的地点位、话术均可在机器人管理后台中进行配置。
4.2 效益分析
通过将服务机器人与铁路客运站既有系统设施融合应用,机器人作为后台系统的终端触手,优化补充乘客服务能力,提升了车站公告、票务信息、周边资讯、赛事资讯的传播渠道。引导旅客进站过程中,通过一对一人脸识别进站核验,物联人工通道、提前呼叫直梯,对特殊旅客进行定向引导,显著缩短旅客排队进站核验时间,提升检票系统复用率,减少旅客的重复操作,平均提升旅客进站时间近1 min。作为前端设备的扩展后台,实现设备IOT数据传输状态数据延时<10 ms; 在扫图过程中,建图闭环耗时<2 s;典型场景地图数据加载时间减少90%;场景辨识度提升,可进行场景内的动态地图更新;机器人自主协同避让的决策成功率为100%,协同效率为90.0%。
5 结束语
服务机器人相比其他服务手段,具有更多的智慧性、主动性、灵活性,通过机器自学习,提高旅客服务中的前瞻性,通过与通道门、直梯物联,集成证件识读、二维码扫码模块,与铁路实名制进站核验系统对接,利用既有设备设施,提高铁路客运站的服务水平,为旅客提供更加便捷、智能的乘车体验,解决既有旅客服务中耦合度高、信息点分布散的问题,实现铁路旅客服务信息的集成共享。同时,服务机器人作为智慧展示终端,为将来铁路智慧化,如安防巡检、环境提升、助老助残、信息传播等提供前端硬件支撑[11]。