智能巡检机器人在变电站运维管理中的应用
2022-09-26刘乐
刘 乐
(广东电网有限责任公司揭阳供电局,广东 揭阳 522000)
1 智能巡检机器人概述
智能巡检机器人是以自主或遥控的方式,在无人值守的环境中,完成对设备进行红外温度监测和仪表油位的图像识别等任务,替代人工完成巡检中遇到的繁、难、险和重复性的工作,可用于室外、室内以及电力廊道巡检,其中以室外巡检为主。智能巡检机器人在变电站运维管理中的广泛应用,极大的降低巡维人员工作负荷,提高设备巡检工作效率和工作质量。
2 智能巡检机器人的主要功能
智能巡检机器人具有高清视频监控、智能表计识别、红外测温、历史数据查询、智能巡检等功能,其中巡检、红外测温、表计识别是其主要功能。
2.1 智能巡检功能
智能巡检机器人的巡检系统能够在设备投入使用后、维修改造、严重缺陷、过载或负载异常,以及雷雨天气等特殊工作条件下,代替巡检人员进行辅助巡检工作,如全面巡视、特殊巡视、风险管控巡视等,提升巡检工作的安全性。
2.2 红外测温功能
在智能巡检机器人的巡检系统中一般都配备在线式红外热成像仪,通过机器人位置集成,从多角度对全站的一次设备本体和接头实现集成温度扫描,采集相应的红外热图及温度数据,从红外热图中提取温度信息,自动追踪测量全屏最高温、点温度以及区域温度等,通过对温度数据进行智能分析和评价,自动诊断出一次设备本体和接头过热问题,并发出报警信息。
2.3 智能表计识别功能
智能机器人巡检系统的智能表计识别功能通过代替人工操作,自动读取指避雷器表、形成类油位表、SF6压力表、套管油位、闸刀分合状态以及分合闸知识等仪器型号。还可通过现场拍摄图像进行图像处理识别,通过比较每次访问的数据对读取的数据进行数据判断,并发出异常报警,避免出现严重问题。
3 应用实践
某变电站系统是由500 kV、220 kV、35 kV 电压组成,在日常巡检工作中以人工巡检为主,因此经常出现无法及时跟踪及保存巡检结果;巡检任务重;设备漏巡、缺陷误判造成事故隐患等各种问题,严重影响变电站运维管理工作质量。为改变运维管理现状,该变电站在站内应用了智能巡检机器人,取得了良好的应用效果。
3.1 变电站运维管理应用分析
3.1.1 单站模式
在该变电站中,智能巡检机器人在单站模式中应用主要有可见光巡视如图1 所示、红外测温巡视如图2 所示两种类型,正常白天巡视高清表计为可见光巡视,晚上进行红外测温巡视。主要有红外测温巡视、SF6表计巡视、油位读数巡视、刀闸分合判断巡视、全面巡视等5 种巡检模式。在机器人投入使用前期,每三次巡视工作由机器人执行一次工作,待机器人巡视误差值稳定后转由机器人多次巡检,每周人工复查一次,辅助运维人员巡视,优化工作时间、提高工作效率。

图1 可见光巡视

图2 红外测温巡视
智能巡检机器人在单站模式应用及运维管理中,首先应建立实际巡检过程中的海量图像收集监理模板库、神经网络训练模型、通用匹配模型,然后利用智能表计识别功能,对避雷器表、形成类油位表、SF6压力表、套管油位、闸刀分合状态以及分合闸知识等表计数据进行收集、二次识别、判断等,表计识别过程如图3所示。

图3 表计识别过程
智能巡检机器人的巡检系统对读取的数据进行判断后,通过计算,对异常数据发出报警信息,输出正常数据,以提升数据识别的准确率。
以一次红外测温为例,于2022 年02 月07 日采用红外热成像仪对该变电站220 kV1-5M 分段5M 侧20155刀闸C相T型接头2设备进行红外测温,测得20:33:10—20:46:41 时间段接头温度在19.6700~21.6300 ℃之间,温度均正常,故该接头设备并未出现过热问题。
3.1.2 集控模式
系统结构:集控模式下,智能巡检机器人的巡检系统结构如图4所示。

图4 系统结构图
系统功能:集控模式下,智能巡检机器人的巡检系统功能主要分为配置中心、数据中心、任务中心3 大模块。其中配置中心主要负责用户管理、角色管理、站点配置、机器人台账、操作日志等,具有保密性、完整性以及可获得性,用户及角色管理如图5 所示;数据中心主要是进行任务和设备数据浏览、设备告警、缺陷管理、对比分析、对比分析、二次识别以及机器人告警等,设备告警如图6所示,任务中心主要是进行任务制定、展示以及统计。
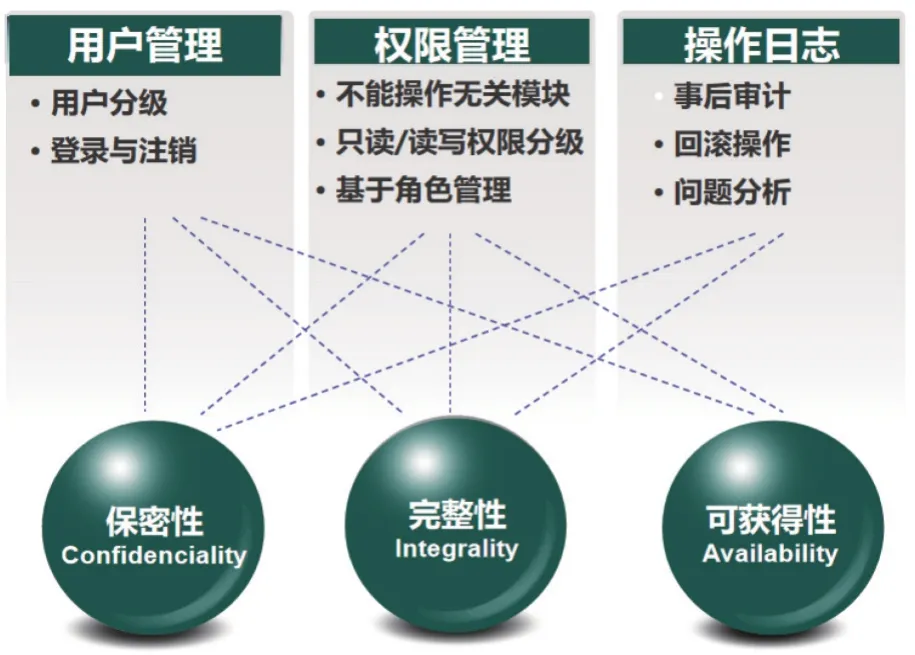
图5 用户及角色管理

图6 设备告警
二次识别:指针表、油位表等,基于规则推理的表计识别,基于高精度定位方法,可在表头区域精细化的识别指针、条纹等表计读数,同时也提供了指针识别置信度,实现指针读数的高精度识别和高可靠的识别置信度输出。数字表、刀闸、分合等,分类状态识别问题,基于海量变电站巡检大数据,通过数据挖掘、机器学习、深度学习等技术,实现具有高泛化能力的表计高精度的状态识别,同时提供高可靠性的概率化置信度输出。
站端巡检数据审核流程:任务下发 数据审核缺陷管理 统计分析。其中,任务下发包括了任务制定、执行;数据审核是对站端数据、任务数据、设备告警进行审核;缺陷管理是对缺陷审核和跟踪;统计分析是对设备告警和设备缺陷进行总览,并对数据进行对比分析。
3.2 应用效果分析
在变电站运维管理中,通过应用智能巡检机器人,在提高巡检频次、减少人员工作负荷、提高工作安全性和巡检工作质量等方面取得了重大进展。其应用效果主要体现在这几个方面:(1)提高巡检频次。在500 kV 变电中,人工巡检频次为每7 天巡检一次,应用机器人后,巡检频次为一天巡检一次,巡检频次提高了7 倍。(2)减少人员工作负荷。人工巡检耗时9 h,加上录入系统1 h,运维人员必须进行大约10 h的操作,而应用机器人后,巡检工作由机器人代替完成,人工仅须对异常数据核实,大大减少了运维人员的工作量,使运维人员可以在设备维护以及其他工作上投入更多的经理,在一定程度上也节约了电网企业的劳动力成本。(3)提高工作安全性。运维人员在高电压、高磁场环境及恶劣气象环境下进行巡检工作存在较大风险,而应用机器人后,由机器人巡检代替人工巡检,运维人员只须做好应急指挥工作,大大提高了巡检工作的安全性。(4)提高巡检工作质量。人工巡检费时费力,且巡检质量受运维人员的生理状态、心理素质、工作经验、技能水平等影响,而机器人巡检,由机器人代替人工,提高质量表计图片与识别数据可追溯,提高设备检验数据分析的效率和准确性。
4 结束语
变电站运维管理质量在电网运行中有着极其重要的地位。在传统的运维管理中,巡检工作均是由人工完成,工作量大,不仅需要大量人工成本,还存在较大风险,运维管理质量难以保证。为此,本文通过了解智能巡检机器人的主要功能,对其在变电站单站模式和集控模式运维管理中的应用进行了分析和研究,提升变电站运维管理质量,保障变电站的安全稳定运行。
