基于前景理论的社会资本合作演化博弈分析
2022-09-26吕俊娜
吕俊娜,罗 悦
(重庆交通大学 经济与管理学院,重庆 400074)
由于财政的约束和对基础设施日益增长的需求,政府利用有限的公共资金和私人资本提供公共服务,满足公共需求,获得额外的社会价值。PPP模式在英国出现并得到良好应用后,这种模式开始从基建领域逐渐发展到各个公共领域[1]。因为PPP项目涵盖范围较广,对于大多数社会资本方而言,其资源和经验是有限的,很难兼顾各方面[2-3]。多数PPP项目都采取联合投资人共同参与方式,一方面可以填补单个投资人在风险控制能力上的不足,另一方面可以通过联合充分发挥各自的优势,达到资源最优配置[4]。PPP项目的私营部门投资人包括建设单位、运营单位和金融机构等,代表着不同的利益主体,所追求的目标会有冲突,使合作变得不稳定[5-6]。一旦合作关系不稳定,很可能会导致PPP项目的失败甚至损害公众的利益[7]。SOOMRO等[8]评估由私营部门合作伙伴发起的一组失效机制,提出由于私营部门合作伙伴的不当决策而使项目出现问题,最终致使项目失败。伦敦地铁项目、中国成安渝高速公路项目失败的原因之一就是私营部门内部联合投资人矛盾,导致投资受损,也影响社会公众的利益。所以对私营部门之间的合作关系进行研究非常重要。
目前关于PPP合作关系的研究在很大程度上忽略了私营部门之间的合作关系,而是侧重于公共部门和私营部门之间的合作关系。潘鹏程等[9]通过对已有文献的总结以及实际案例的分析,得到在不同阶段对公私双方合作关系稳定性产生影响的主要因素。有学者通过建立模型探讨如何保持公私合作关系的稳定性,段世霞等[10]基于因素间的因果关系,建立系统动力学模型,揭示内外部因素对项目稳定性的不同影响,最后提出不同阶段的实施措施;刘彩霞等[11]基于公私合作中的冲突问题,建立冲突模型,运用AHP法确定局中人优先序,预测出最终稳定局势;陈琳等[12]从成本与收益的角度,构建演化博弈模型,最终得到公私合作演化稳定方向以及各因素的影响机制。而对于PPP项目中私营部门之间合作关系的研究集中在探究私营部门间的内部结构[13]、合作伙伴的选择[3]、合作的动因及其建立成功关系的因素[14]等。私营部门之间的合作关系是一种合作竞争的动态关系。在对私营部门间合作关系进行研究时,应当用动态的思维去分析,注重合作主体之间的持续协调性。私营部门合作伙伴因为其本身存在识别判断能力、行为分析及推理能力、信息精准度等差异,所以在行为方面存在有限理性。因此,各主体对于同一个项目可能产生收益感知的差异,这种感知差异会对其决策力造成影响,并最终影响合作的稳定性[15-16]。决策者的行为一般偏离于预期效用理论而表现出前景理论的决策偏好特征[17]。前景理论中的参考依赖考虑了博弈各方的心理因素,认为决策者效应分析中,不能够通过决策结果形成的绝对效用来判断,而是应该结合某个参照点,依据结果与参照点之间的损益差额来判断[18]。鉴于此,引入前景理论中的参照点概念,使研究结果更贴近实际。
1 社会资本合作演化博弈模型
1.1 模型假设
(1)私营部门之间的合作行为实质上是投资人之间的动态博弈过程。PPP项目中一般比较典型的合作对象为建设投资人和运营投资人,他们组成了私营部门。因此以建设投资人与运营投资人两方为例进行合作演化分析。博弈双方进行策略选择的依据是前景理论中的价值函数。双方在收益感知、风险感知、偏好与分析能力间有差别,所以出现有限理性的特征,对策略选择依据是以实际收益与心理预期收益的差异值,而不是实际损益值。以ΔΠi表示事件i发生后,博弈方实际收益与参照点相比的差异值,ΔΠi=Πi-Π0,其中,参照点是博弈方立足多种策略之上形成的预期收益。依据前景理论中的价值函数,结合其形式V=∑iω(pi)ν(ΔΠi)对博弈方收益进行指代,如式(1)所示。
ω(0)=0,ω(1)=1
(1)
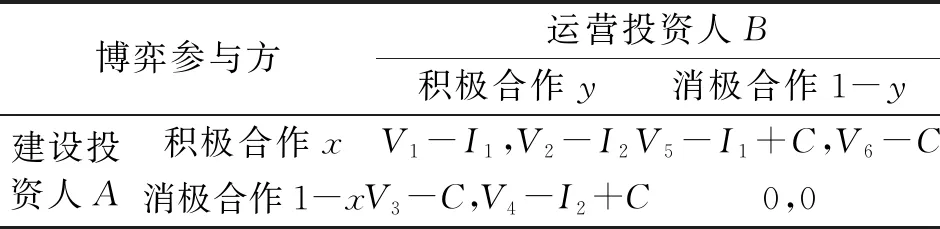
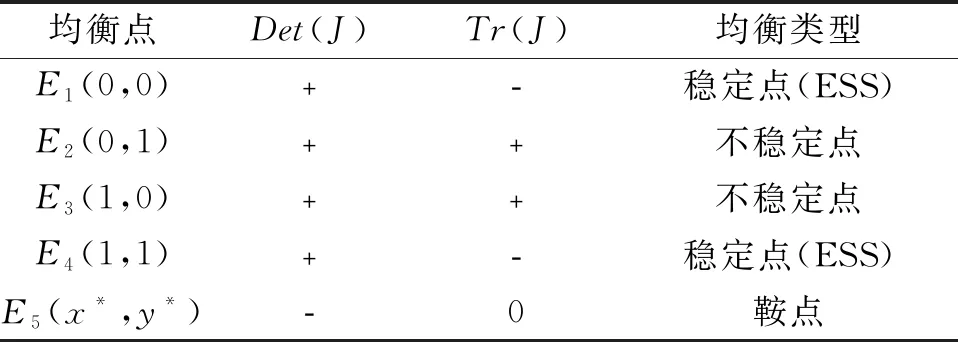
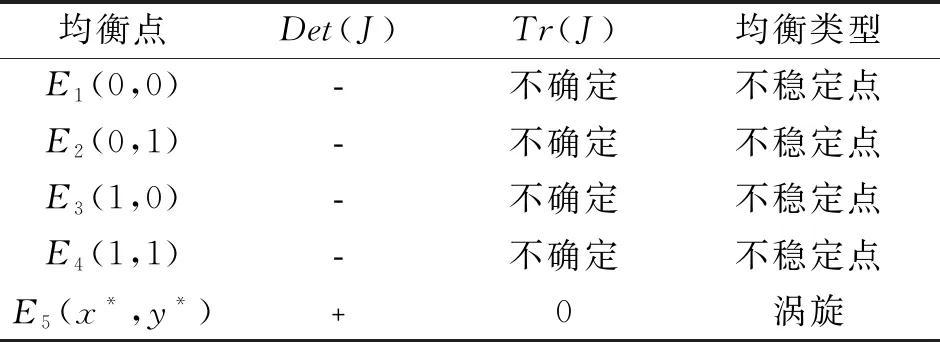
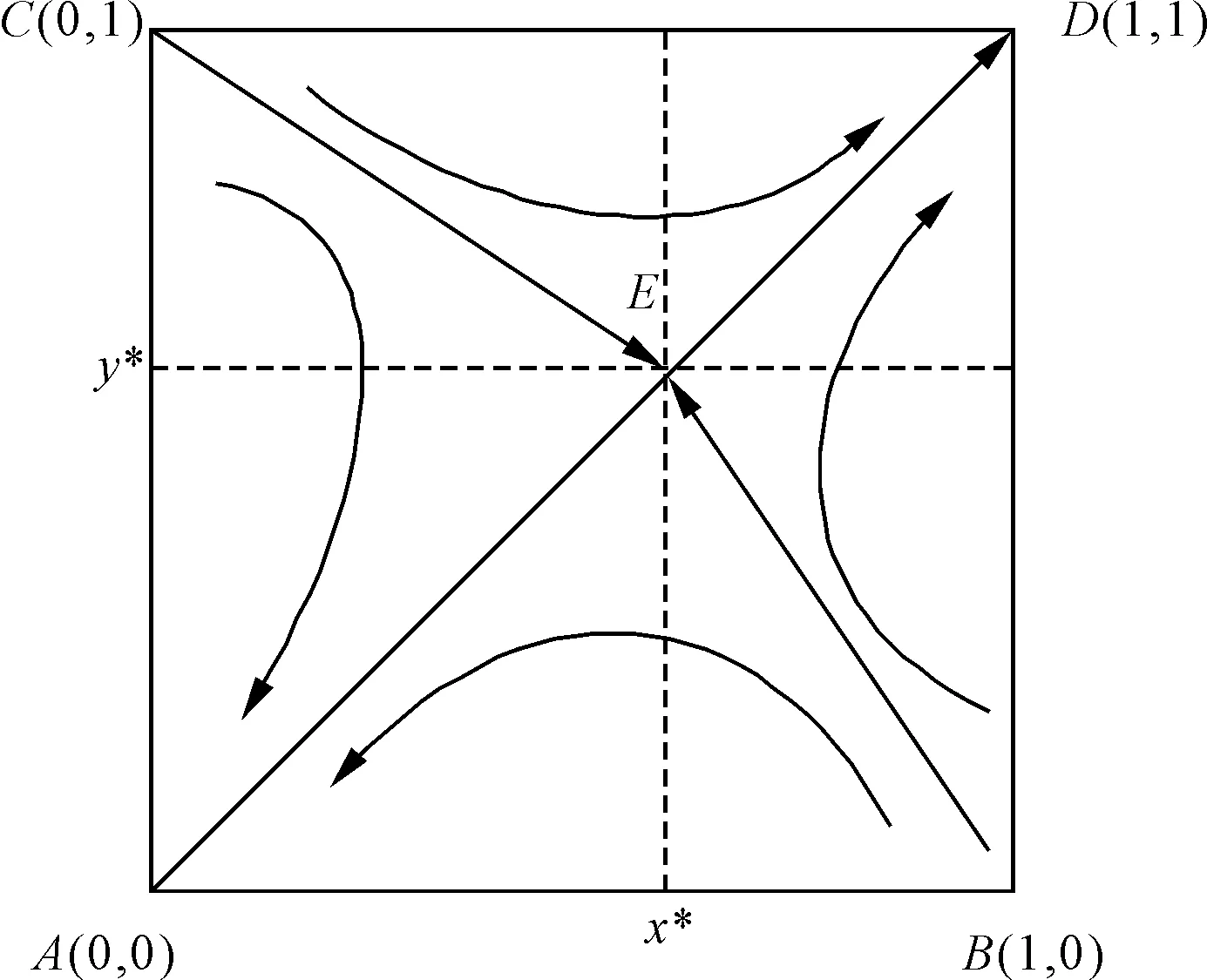
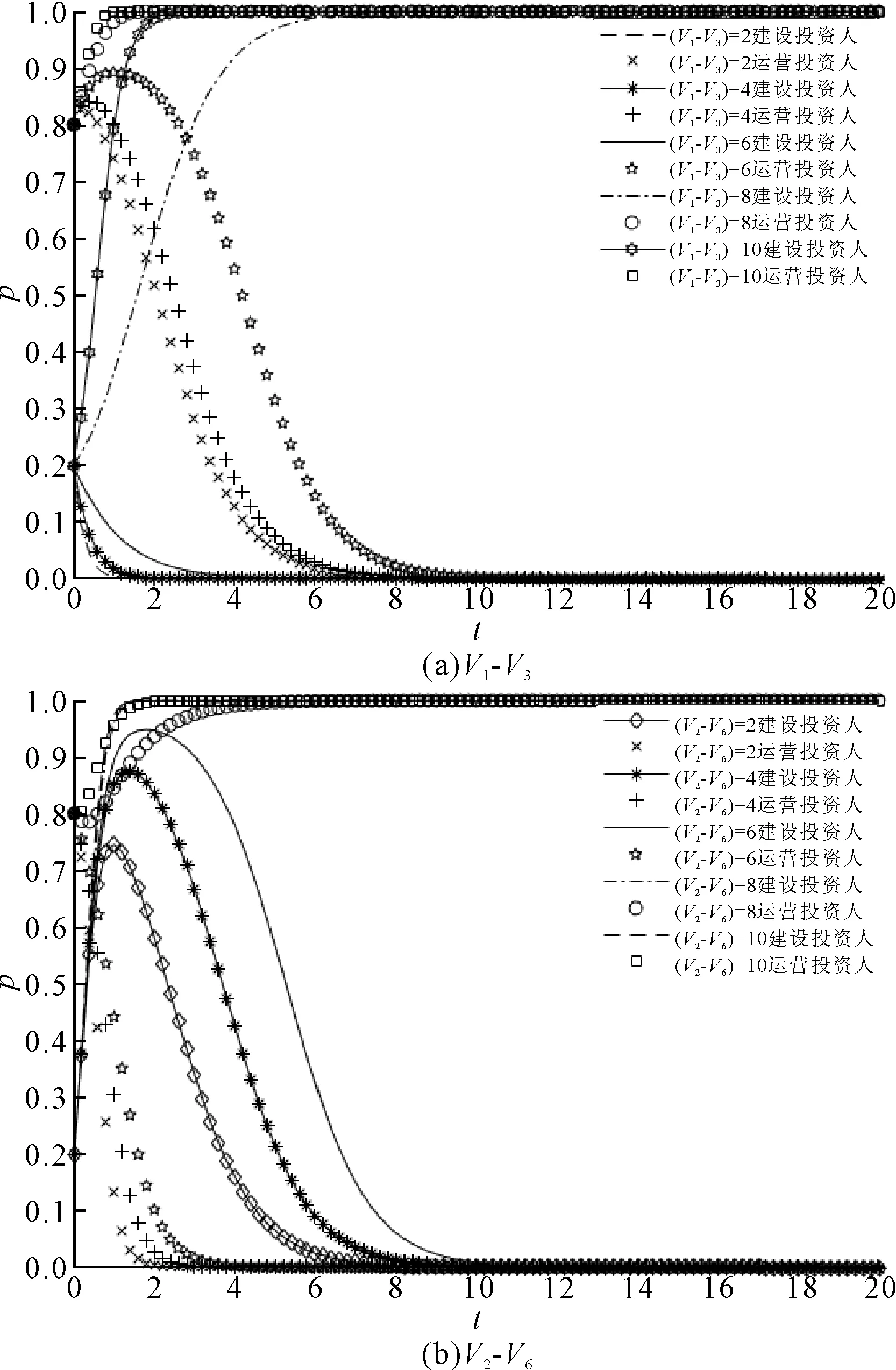
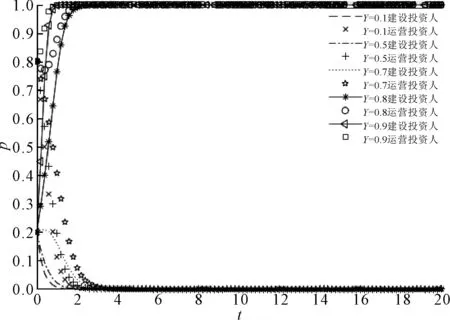
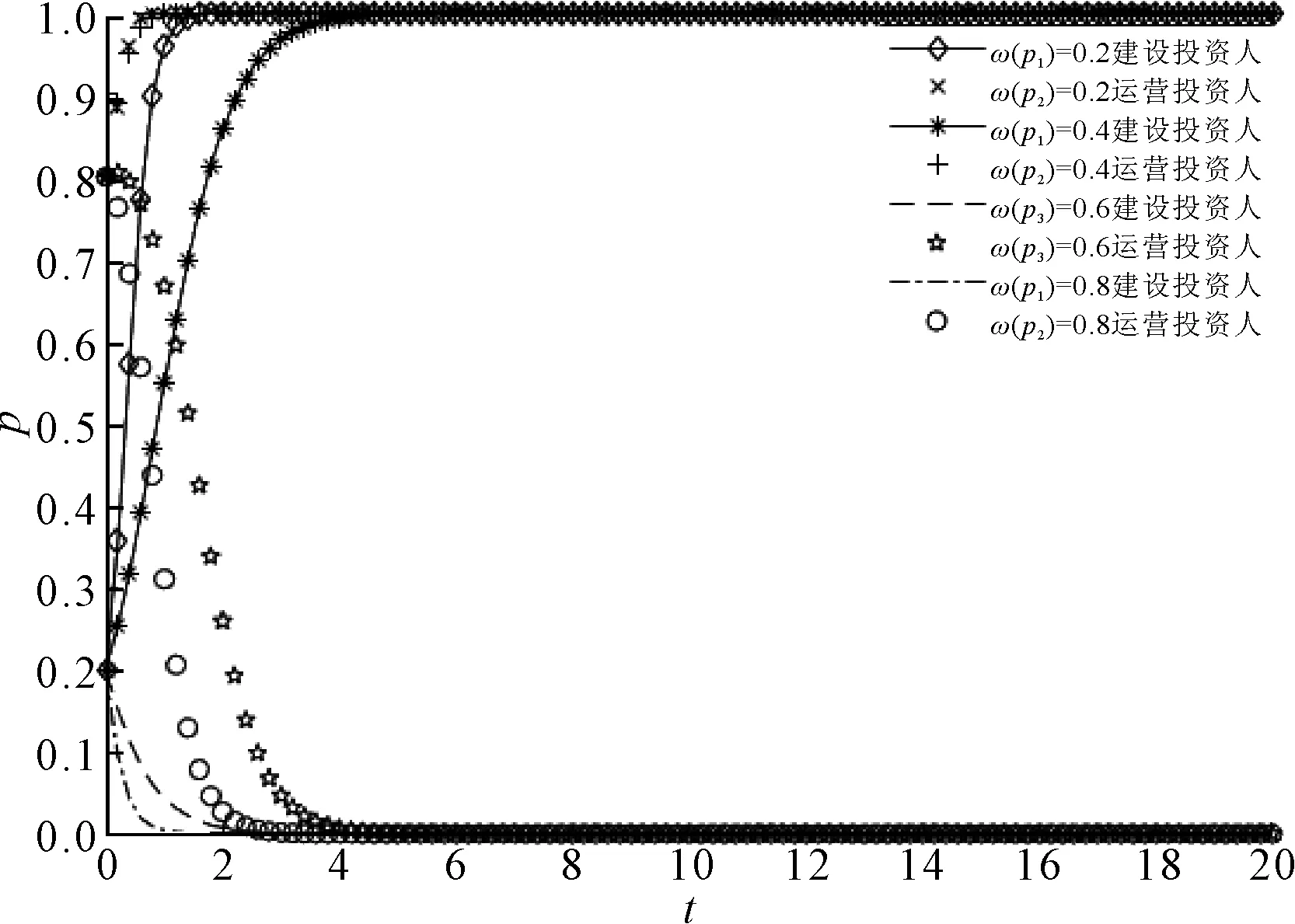
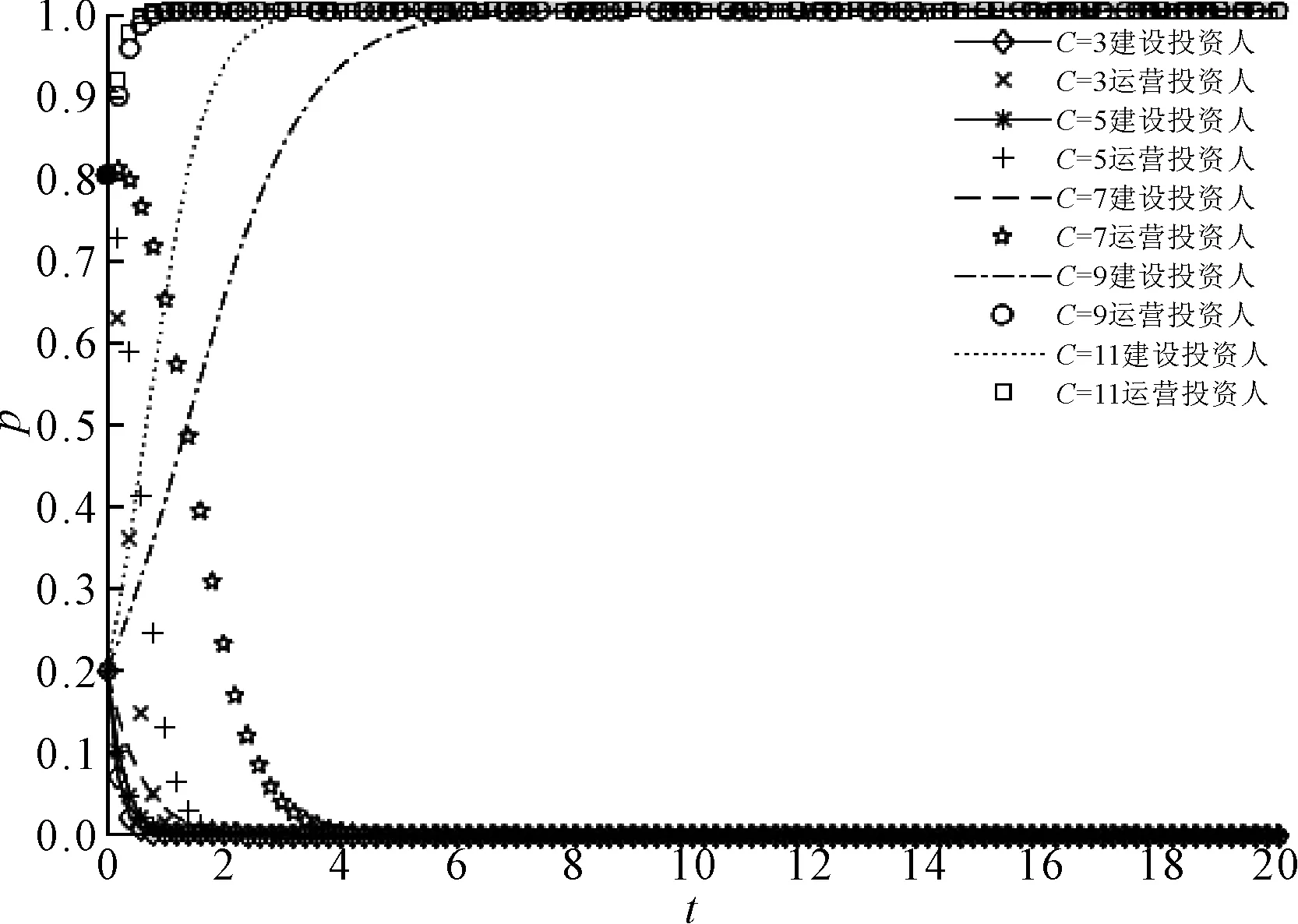
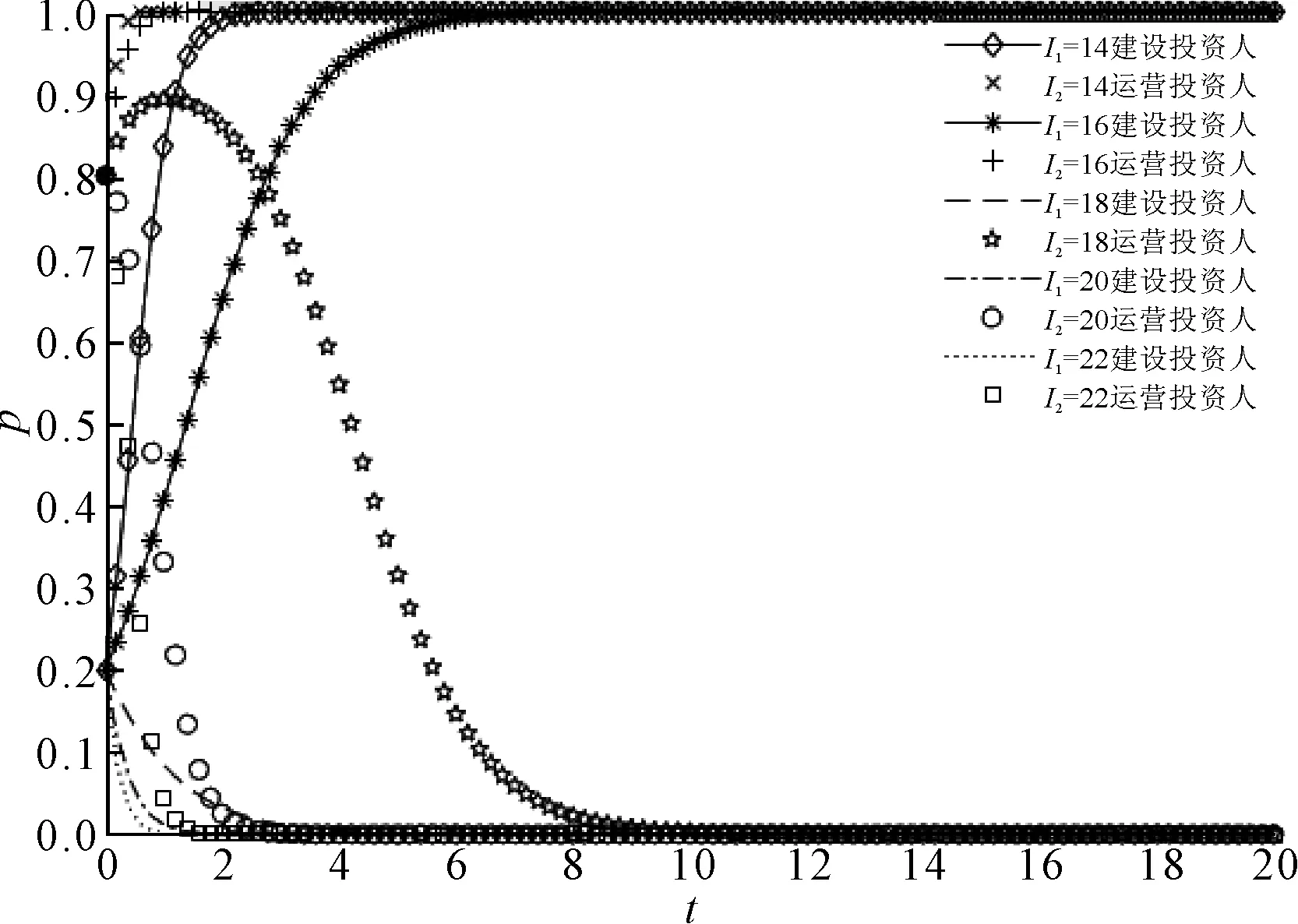
式中:ω(pi)为博弈的决策权重函数,指个体主观层面对事件i出现的客观概率pi的认知,当pi较小时,ω(pi)>pi;当pi较大时,ω(pi) (2)为对合作之中可能存在的机会主义行为进行抑制,假设各方都会以一定的方式加以制约。假设在合作契约之中做出规定,若合作中的某方出现了机会主义行为,则以罚款C作为处理方式,然后立足罚款对“积极合作”策略的履行方进行补偿。但若双方均选择“消极合作”的行为策略时,双方都不会有任何的罚款。 (3)假设建设投资人A在合作之中,“积极合作”策略概率为x,则“消极合作”概率为1-x,同时假定运营投资人B进行“积极合作”策略概率是y,则“消极合作”概率是1-y。 (4)建设投资人A和运营投资人B可以选择“积极合作”与“消极合作”,如果都以“积极合作”为己方策略,那么双方实现优势结合,达到创新效果,共同创造价值增值。建设投资人A形成的感知收益是V1-I1,V1为立足收益增加值形成的感知效用,I1为立足创新而支付的成本。相应的,运营投资人B的感知收益为V2-I2,其中V2为运营投资人B对收益增加值的感知效用,I2为运营投资人B的合作创新成本。 (5)如果双方在策略选择方面相背离,那么履行“积极合作”策略的一方就会因创新行为付出必要的成本,而“消极合作”的一方不进行合作创新,享受另一方带来的价值增值。建设投资人A选择“消极合作”策略,运营投资人B与之相反,则建设投资人A形成的感知收益是V3-C,其中V3为建设投资人A对收益增加值的感知效用,C为选择“消极合作”的投资人的惩罚性罚款。而运营投资人B的感知收益V4-I2+C,其中V4为运营投资人B在合作中立足收益增加值而形成的感知效用。如果建设投资人A选择“积极合作”策略,运营投资人B与之相反,则建设投资人A的感知收益为V5-I1+C,其中V5为建设投资人A对收益增加值的感知效用。而运营投资人B的收益V6-C,其中V6为运营投资人B对收益增加值的感知效用。 (6)如果双方都选择“消极合作”策略,则双方都会产生利己行为。建设投资人A和运营投资人B都不进行合作创新,项目不存在增值价值,双方对收益增加值的感知效用均为0。 基于以上假设,构建收益感知矩阵如表1所示。 表1 收益感知矩阵 根据收益感知矩阵,博弈双方感知效用分别为:V1、V2、V3、V4、V5、V6。如果博弈双方都立足“积极合作”策略之上,那么合作创新对应的成功概率表示为p,总收益为π,双方的收益分配比例为k:1-k。这种情况下,用双方签订合同时的收益π0、π0'表示参照点。V1、V2具体如式(2)和式(3)所示。 V1=ω(p)·ν(kπ-π0)+ω(1-p)· ν(π0-π0)=ω(p)·ν(kπ-π0) (2) (3) V3=ω(p1)·ν(π1-π0)+ω(1-p1)· ν(π0-π0)=ω(p1)·ν(π1-π0) (4) (5) (6) (7) 结合演化博弈理论的相关内容,运用复制动态分析法,可以得到建设投资人A选择“积极合作”策略和“消极合作”策略的期望收益分别如式(8)和式(9)所示,平均期望收益如式(10)所示。 U11=y(V1-I1)+(1-y)(V5-I1+C) (8) U12=y(V3-C)+(1-y)*0=y(V3-C) (9) (1-y)(V5-I1+C)]+(1-x)y(V3-C) (10) 运营投资人B选择“积极合作”策略和“消极合作”策略的期望收益分别如式(11)和式(12)所示,平均期望收益如式(13)所示。 U21=x(V2-I2)+(1-x)(V4-I2+C) (11) U22=x(V6-C)+(1-x)*0=x(V6-C) (12) (1-x)(V4-I2+C)]+(1-y)x(V6-C) (13) 由此可构建建设投资人A和运营投资人B的复制动态方程: x(1-x)[y(V1-V3-V5)+V5-I1+C)] (14) y(1-y)[x(V2-V4-V6)+V4-I2+C] (15) 由文献[19]可知雅克比矩阵局部稳定性分析之下,针对博弈系统找寻进化稳定策略。Det(J)表示矩阵中的行列式,Tr(J)代表迹,可得雅克比矩阵如式(16)所示,矩阵行列式如式(17)所示,矩阵的迹如式(18)所示。 (16) Det(J)=(1-2x)[y(V1-V3-V5)+V5-I1+C)](1-2y)[x(V2-V4-V6)+V4-I2+C]- (x-x2)(V1-V3-V5)(y-y2)(V2-V4-V6) (17) Tr(J)=(1-2x)[y(V1-V3-V5)+V5-I1+C]+(1-2y)[x(V2-V4-V6)+V4-I2+C] (18) 以进化稳定策略(ESS)作为矩阵判断的方法,当Det(J)>0,且Tr(J)<0时,处于进化稳定的状态,结合这一条件,展开针对平衡点的稳定性研究。复制动态方程的分析中,可得推论1~推论3。 推论1当C+V5-I1<0,且C+V4-I2<0时,即在投资人合作博弈中,有机会主义行为的投资人提供的罚款不能够对合作创新投资人的成本及收益增差值感知差额进行补偿,此时系统在进化稳定的过程中,均衡点是(0,0)和(1,1)。具体分析结果如表2所示。 表2 局部均衡点稳定性情形1 推论2当C+V5-I1≥0,且C+V4-I2≥0时,即在投资人合作博弈的过程之中,如果投资人存在机会主义行为,因此受到了罚款,罚款金额对于进行创新的投资人付出的成本与获得的收益感知差额可以进行补偿,就会出现鹰鸽博弈。可得均衡点(0,1)和(1,0)。不管博弈双方面临怎样情况,一定会有一方“积极合作”,一方“消极合作”的情况,具体分析结果如表3所示。 表3 局部均衡点稳定性情形2 推论3当C+V5-I1≥0,且C+V4-I2<0时,即如果有机会主义行为的运营投资人B提供的罚款对于建设投资人A在成本及收益增加值感知差额可以进行补偿,但是若有机会主义行为的建设投资人A付出的罚款,对运营投资人B的成本及收益增加值感知之差无法进行补偿,则结合雅可比矩阵稳定性,可得到系统无法实现稳定均衡点的进化,会围绕E5(x*,y*)展开螺旋运动。当C+V4-I2<0,且C+V4-I2≥0时,结论一致,具体分析结果如表4所示。 表4 局部均衡点稳定性情形3 因为演化系统最终目标是让各方均进行“积极合作”,减少合作中的机会主义行为,增加合作稳定性,创造项目价值增值。所以要使系统收敛于进化稳定均衡解E4(1,1)。在具体活动中,进行创新的投资人,面对对方的机会主义行为,能够获得补偿,但是这种补偿往往不能够对自身成本与收益增加值的差额进行补偿。即仅有情形1与上述相符,能够让演化结果落在E4(1,1)。所以,后续以此为讨论重点,研究与之有关的参数。 图1 博弈双方复制动态和稳定性 由图1可知,(0,0)和(1,1)为此博弈中的进化稳定策略,如果初始数据位于区域ABEC时,就会收敛到(0,0),而如果位于区域BDCE时则可以收敛到(1,1)。只有ABEC区域的面积比BDCE的面积更大,收敛到(1,1)的概率就会更高。由于博弈是为了帮助双方最终均进行“积极合作”,即收敛在(1,1)。故而SBDCE越大,则SABEC越小,收敛于(1,1)的概率就更高,因此基于SABEC大小影响因素的探究,可以研究投资人合作策略决策之中的各种影响因素。 立足上述研究可知,系统收敛于E4(1,1)的标准中,关系到双方感知价值V1、V2、V3、V4、V5、V6,在现实中,博弈双方都不可避免的存在有限理性的情况,通常会出现认知及价值判断的有限理性,导致系统无法收敛于E4(1,1)。因此,运用前景理论的有关内容展开研究。 结论1选择机会主义行为后,投资人对积极合作创新感知的效用越大,即V1-V3和V2-V6越大,投资人保持合作创新的可能性越大。随着投资人选择“积极合作”与“消极合作”策略后的感知价值出现越来越大的差距,导致SABEC递减,而SBDCE递增。由此可知,与消极合作的情况对比,投资人如果立足积极合作能够形成更高的感知价值,则双方创新的概率就更高。证明如下: 而V1和V2的大小跟权重函数ω(pi)和博弈双方基于参照依赖效应的感知效用ν(ΔΠi)有关,所以如果要增加V1、V2的大小,除了增加实际收益值之外,还需要考虑提高对创新成功率的感知,即ω(p)与ω(1-p)的大小。投资人如果非常明显的感知到了创新失败的可能性,那么这种感知越高,即ω(1-p)越大,V1、V2越小,保持创新就更加的不稳定。对于权重函数ω(p1)、ω(p2),前景理论提出,合作主体因为有限理性,在合作中都存在过度自信的情况,会高估信息精准度,对自己信息赋予超过实际的权重。所以,如果合作主体选择高估消极合作的成功概率,表现出过度自信,即ω(p1)>p1,ω(p2)>p2,将导致V3和V6的值大于实际值。而V3、V6越大,保持合作稳定性的概率就越小。 结论2在投资人合作过程中,设置的惩罚性罚款C越高,那么就能够更好的确保合作稳定性。当C的数额上升,即SABEC递减,SBDCE递增,可知罚款能够推进双方合作关系的稳定。罚款的增加,可以规避投资人机会主义行为,保证合作创新以稳定状态推进。证明如下: 结论3投资人付出的创新成本I1、I2越小,持续处于创新状态的概率越大。当I1、I2降低,即SABEC递减,SBDCE递增,此时双方积极合作的可能性更高。所以合作创新需要仔细考量,除了要对技术投入成本进行分析,更要考虑彼此的沟通效率,考虑信息传递中产生的各种成本。证明如下: 为进一步探索社会资本合作演变的内在规律,以Matlab软件为载体展开数值模拟仿真,结合参数及观察仿真过程的分析,分析合作中最理想的稳定策略。以PPP轨道交通项目为例,假设合作双方的出资比例为1∶1,根据模型基本假设,设定初始参数值:I1=I2=15,k=0.5,C=8,演化次数t=20,系统演化的初始点(x0,y0)为(0.2,0.8)。立足上述初始值,对参数进行反复赋值,最终得出结论。 感知价值差距对系统的演化影响如图2所示。可知感知价值差,即V1-V3和V2-V6存在临界值,如果超过这一数值,投资人双方都会选择积极合作,反之则选择消极合作。并且建设投资人对V1-V3大小的变化敏感性更高,而运营投资人对V2-V6大小的变化敏感性更高。当感知价值差距逐渐上升时,双方收敛于1的速度也会变得更快,即对比消极合作,投资人立足积极合作感知的效用越理想,那么双方在合作中形成的稳定性也就越理想。 图2 感知价值差距对系统的演化影响 由于V1、V2、V3、V4、V5、V6跟权重函数ω(pi)和博弈双方基于参照依赖效应的感知效用ν(ΔΠi)有关。因此,进一步对感知效用ν(ΔΠi)中的边际递减敏感性程度系数γ,以及权重函数ω(p1)和ω(p2)进行探究。边际敏感性系数γ对系统的演化影响如图3所示,可知边际递减敏感性系数存在临界值,如果高于临界值,投资人双方都会选择积极合作策略,反之会选择消极合作策略。同时随着系数的上升,收敛于1的速度也会随之加快,即选择积极合作的速度越快。 图3 边际敏感性系数γ对系统的演化影响 权重函数ω(pi)对系统的演化影响如图4所示。可知权重函数ω(pi)存在临界值,如果高于临界值,投资人双方都会选择消极合作策略,反之会选择积极合作策略。即投资人对自身能力越肯定,就越容易选择消极合作。这是因为合作主体过度自信,即ω(p1)>p1,ω(p2)>p2,将导致V3和V6的值大于实际值。而V3、V6越大,保持合作稳定性的概率就越小。 图4 权重函数ω(pi)对系统的演化影响 惩罚性罚款对系统的演化影响如图5所示。可知惩罚性罚款增加到一定程度,投资人双方都会选择积极合作策略,反之会选择消极合作策略,并且随着惩罚性罚款的不断增加,投资人选择积极合作策略的速度更快。这是因为接受的罚款不足以抵消积极合作方付出的成本与收益增加值之间的差值,而消极合作方惩罚的罚款小于对方创造的收益增加值。所以只有适当的提高罚款才能鼓励双方积极创新。 图5 惩罚性罚款对系统的演化影响 合作创新成本对对系统的演化影响如图6所示。可知成本增加到一定程度,投资人双方都会选择消极合作策略,反之会选择积极合作策略,并且当成本不断增加,投资人会更快地选择消极合作策略。这是因为收益增加值不能抵消掉付出的成本,选择创新只会给投资人带来更低的收入,所以越快地选择消极合作,不进行创新。 图6 合作创新成本对对系统的演化影响 私营部门对合作创新收益增加值的感知价值、合作创新成本和惩罚性罚款等的看法是对合作稳定性产生影响的关键原因。因此,要结合目标需求,采取有效措施,保持合作稳定性。 (1)社会资本应加强对难点和不确定性因素的认识,获取全面、丰富的造价参考资料,从而对合作创新感知效用做出合理的判断,提高自我认知水平,防止因为过度自信而导致合作的不稳定。政府应该进行政策指导和建立合理的信贷机制,提高社会资本对战略合作长期利益的认识。 (2)适当的加大对投资者机会主义行为的惩罚力度。对投资者的机会主义行为主要采取罚款的形式,可以适当加大罚款金额,禁止其以后参与其他类似项目,情节严重者追究其法律责任等。此外,建立一个完整的PPP项目数据库,记录投资者的合作项目及其机会主义行为,此后优先考虑有经验的投资者,让之前有机会主义行为的投资者失去参与其他PPP项目的机会。 (3)降低社会资本合作创新的成本。合作创新中,应最大程度降低因为无效或低效交流、信息传输不畅等因素发生的成本。政府也应对社会资本进行适当的补偿,鼓励其进行合作创新,实现价值增值。 (4)恰当选取合作伙伴。一方面要考量私营部门之间功能的差异。另一方面,应考虑双方的地位和规模相匹配。否则,收入分配和成本分担将不可避免地出现巨大差距,导致合作关系不稳定。 社会资本合作行为的演化博弈分析过程中涉及的影响因素还有很多,策略空间得到一定程度的简化,其背后复杂的相互作用机制尚未深入研究。今后的研究中,演化博弈模型可以扩展到3个或者更多的参与者。1.2 收益感知矩阵的构建

1.3 演化博弈模型的构建



1.4 策略的进化稳定性分析

2 模型结果分析
2.1 复制动态方程分析

2.2 感知价值参数分析





3 投资人合作的数值分析与验证
3.1 积极合作与消极合作的感知差异的敏感性分析
3.2 收益感知影响因素的敏感性分析
3.3 惩罚性罚款的敏感性分析
3.4 合作创新成本的敏感性分析
4 结论