灾后救援仿生机器人设计*
2022-09-26北京科技大学天津学院厉登敏朱永远张伟
北京科技大学天津学院 厉登敏 朱永远 张伟
对于一些自然灾害产生后,传统式救援方法效率不高、非常容易引起二次伤害的状况,融合复杂的地势环境与生物在繁杂地貌中机动灵活的特性,设计了一种用以灾后救援的仿生机器人,它主要是由远程监控站和机器人本身构成。远程监控站关键承担接受机器人送回的救援现场画面,远程监控和遥控机器人的下一步工作。机器人的核心由运动控制系统、感应器采集系统和数据通讯系统等构成。各系统之间相互配合,并根据效仿猫的运动特点,实现在窄小室内空间和繁杂地势环境下迅速找寻生还者、精准定位和传回有效信息的作用。该灾后救援仿生机器人具备灵便、即时通讯的特点,可以协助进行救援工作,具备一定的实用价值和行业应用价值。
1 研究意义和背景
我国是世界上自然灾害频繁发生的国家之一[1]。随着灾难发生次数增多,其严重性、多样性和复杂性也逐渐增加,按照黄金72h的救援原则,救援时间十分紧迫,救援人员需要在短的时间内超负荷工作。由于过度疲劳引起的工作效率下降以及救援空间狭小,随时可能会发生二次灾害使救援环境变得更加严峻,这些问题都给救援者带来了巨大的困难及挑战。相比传统的人力抢险救援,灾后救援仿生机器人拥有坚硬的外表和灵活的身躯,具备高强适应性。与此同时,机器人具有的定位被困人员的准确位置和实施传输画面等强大功能,也使得其能够更加高效、精准、安全以及全面的参与各种救援行动。因此,灾后救援仿生机器人的存在可以减少一些不必要的危险。
在我国抗灾机器人和仿生学科学研究启动比较晚,但十分受重视。例如,我国“863”方案支持地震救援辅助机器人的开发等。中国各高校、科学研究院所、企业单位等都开展了充分的科学研究,近些年获得了较大进步。2017年,我国国家科技部在《“十三五”公共安全科技创新专项规划》中明确指出要独立开发救援机器人作为关键高新科技装备,并给予很多收益支持和现行政策具体指导[2]。在这样的情况下,中国救援机器人产品研发逐渐迎来运用的高峰时段。在这段时间,消防安全机器人和无人飞机慢慢在消防领域得到运用;此外,地震救援机器人也在四川得到应用;我国由北京理工、沈阳市自动化技术研究室、西安科技大学等单位共同开发的矿井机器人也成功得到使用;水下机器人也伴随着“潜龙号”系列机器人的运用取得了较大发展。总的来说,在现行政策、要求等层面的不断支持下,伴随着人工智能技术、北斗导航系统等新技术的不断发展,我国在援救机器人领域发展前景非常广阔。
2 救援仿生机器人硬件系统
2.1 机械结构
灾后复杂的非结构地面环境,为救援机器人带来了极大的挑战。为了使机器人能够顺利通过崎岖的、含有不规则障碍物的道路,其应该具有较强的稳定性、灵活性、持续续航能力、越障能力等性能。因此,基于对动物猫的仿生观测实验数据,综合其身体结构、行走机理以及整体稳定性等性能,构建了一种救援仿生四足机器人。机器人机械本体由机身结构、头部结构、尾部结构减震和腿部结构四部分组成共有11个自由度,其中腿部共有8个自由度,多个自由度可以显著提高机器人运动灵活性,并通过控制各个关节的摆角调整腿部姿态和机体重心,达到机器人稳定的目的,不易发生侧翻。因为足式机器人的机体和地面是分离的,所以不管路面情况复杂程度和腿部支撑点位置机器人都可以保持机体稳定移动,并且运动系统具有主动效果[3]。
2.2 运动控制系统
2.2.1 四足运动步态
四足机器人是一个复杂的多关节型机器人,要对其实施有效的控制,除了要对全身的多个驱动关节进行准确高效地控制外,各腿之间还要相互协调,共同完成行进任务。然而各腿之间运动空间的相互重叠、相互干扰,使得控制模型相对复杂。
依据猫的行走规律,对机器人进行了合理的步态规划。基于生物的行为特性,建立运动学模型,将机器人分为前进速度、跳跃高度以及姿态角度三个部分进行分解控制,并且在一个运动周期内步态分为初始状态、运行状态、调整状态、运行状态、调整状态。比如当机器人前进时,任何时刻都至少有三条腿支撑于地面,每次仅有一条腿抬起,四条腿依次担任飞行腿,周期性的完成前进过程[4]。
2.2.2 仿生四足机器人运动控制
运动控制系统是机器人实现自身功能的关键所在。灾后救援仿生机器人由超声波测距模块、GPS定位模块、电机驱动模块和MPU6050模块组成。超声波测距模块用于测距发现障碍物,为避障功能提供数据。此模块安装于眼睛处,与头部两个自由度相结合,从而实现最大限度地获取周围情况,为搜救机器人规划路径提供准确的依据。GPS定位模块的用途是实时获取位置坐标,对机器人行走轨迹进行跟踪并且对受灾者的位置精准定位。以HuaDuino板作为电机驱动模块,其有12个舵机接口且自带稳压模块和电源管理模块,可以为大量的自由度提供强劲平稳的动力,从而更好的实现搜救任务。MPU6050可以追踪机器人的运动状态,使机器人能够在复杂的地形上或者在受到外力作用时能够自平衡。
2.3 传感器系统
传感器系统是救援机器人认知周边环境的关键。该传感器系统主要由三大部分组成:红外热成像仪、ESP32-CAM摄像头、气体传感器。灾后可能存在房屋倒塌等情况,机器人可以灵活的进入塌方下并且通过红外热成像仪检测到被困住的伤员,由于红外热成像仪既能在完全无光的情况下检测,还能够在漆黑的夜晚或是大雾中开展探测,因此搭载此传感器的机器人可以大大提高搜救效率,避免搜救遗漏。应用ESP32-CAM摄像头,可以使后台的搜救人员能够实时观测到塌方下的情况,为搜救人员做出快速准确的搜救方案提供途径,并且为机器人提供行进路线的指导。为了避免援救当场存有有害或易燃易爆物品气体,很有可能对救援人员的人身安全导致潜在性危害,在救援人员进到施工现场前,选用气体传感器精确测量空气中的有害物质成份,以清除一些潜在性风险。
2.4 通讯系统
通信系统是搜救机器人服务器与远程监控站中间信息互换的安全通道,关键承担服务器与远程操纵终端设备之间的数据传输[5]。因此,通信系统的速度以及稳定程度对救援仿生机器人系统的性能具有一定的影响。首先,机器人需要将现场的画面实时传输给远程监控站,以便远程操控人员能够及时的获取现场情况以及机器人状态。其次,各传感器所采集到的现场数据也需要发送给远程监控站,与图像信息相结合,为远程操控人员迅速做出有效的决策提供依据。最后,远程操控人员在获得信息后,需要通过控制站将控制信号发送给主机端,从而规划机器人的行走路线,帮助机器人更好地完成辅助搜救工作。
由于不允许机器人出现失控的状态,视频画面和红外热成像画面对通信要求较高[6],因此上传的画面通过ESP32自带的WiFI模块连接由路由器搭建的无线局域网络,将图像通过网络直接传输回客户端,避免了对其他数据的干扰和视频的卡顿。其他的传感器数据以及客户端发出的指令信号则使用AS32模块通过LoRa物联网通信技术进行传输,以此来保证该类信号在远距离通信中的稳定性。通讯系统具体流程如图1所示。

图1 通讯系统Fig.1 Communication system
3 救援仿生机器人软件系统
为了实现基本搜救的要求以及提高芯片工作效率,在程序设计上采取了模块化处理,设计了主要包括主程序、图像采集模块、红外探测模块、超声波测距模块、驱动模块、GPS定位模块、通讯模块七个模块。图像采集模块负责采集现场画面并上传到客户端;红外探测模块主要负责采集热成像画面寻找生命体;超声波测距模块主要用来在行进过程中检测前方障碍物;驱动模块通过联动控制各个舵机实现各种仿生动作;GPS定位模块主要是在发现生命体时发送生命体位置;通讯模块负责与客户端远程通信,接受指令,上传数据。各个模块运行的具体流程如图2所示。

图2 软件流程图Fig.2 Software flow chart
4 测试与分析
红外热成像仪通过区别人体与环境的辐射特性,将人体的辐射能量转换成物理信号,通过成像系统转换成热成像画面[7],来供救援人员判别是否有幸存者。它具有不受环境光照强度的影响、能耗低、准确度高的特点,大大提高了搜救效率。为了检测距离对红外热成像仪识别的影响,3名测试者被安排在了同一位置,表1记录了红外热成像仪距离三名测试者不同位置检测到的额头温度。由表1可以看出,红外热成像仪与人体距离越远,检测到的温度越低,但是温度下降趋势较小,识别范围足以满足搜救要求。具体数据如表1所示。
5 结论和分析
本文以四足机器人为研究对象加以仿生学,使机器人具有一定的灵活性和稳定性。搭载各种传感器,使其具有穿越障碍物、搜寻幸存者、监控周围环境、精准定位、实时传输现场画面给远程操控台等能力。救援仿生机器人在危险的环境中发挥自身优势,为救援人员提供现场的有效信息辅助搜救工作的开展,尽最大可能保证救援人员的安全并且提高救援工作的效率。救援仿生机器人在灾后救援工作中具有一定的实用价值。
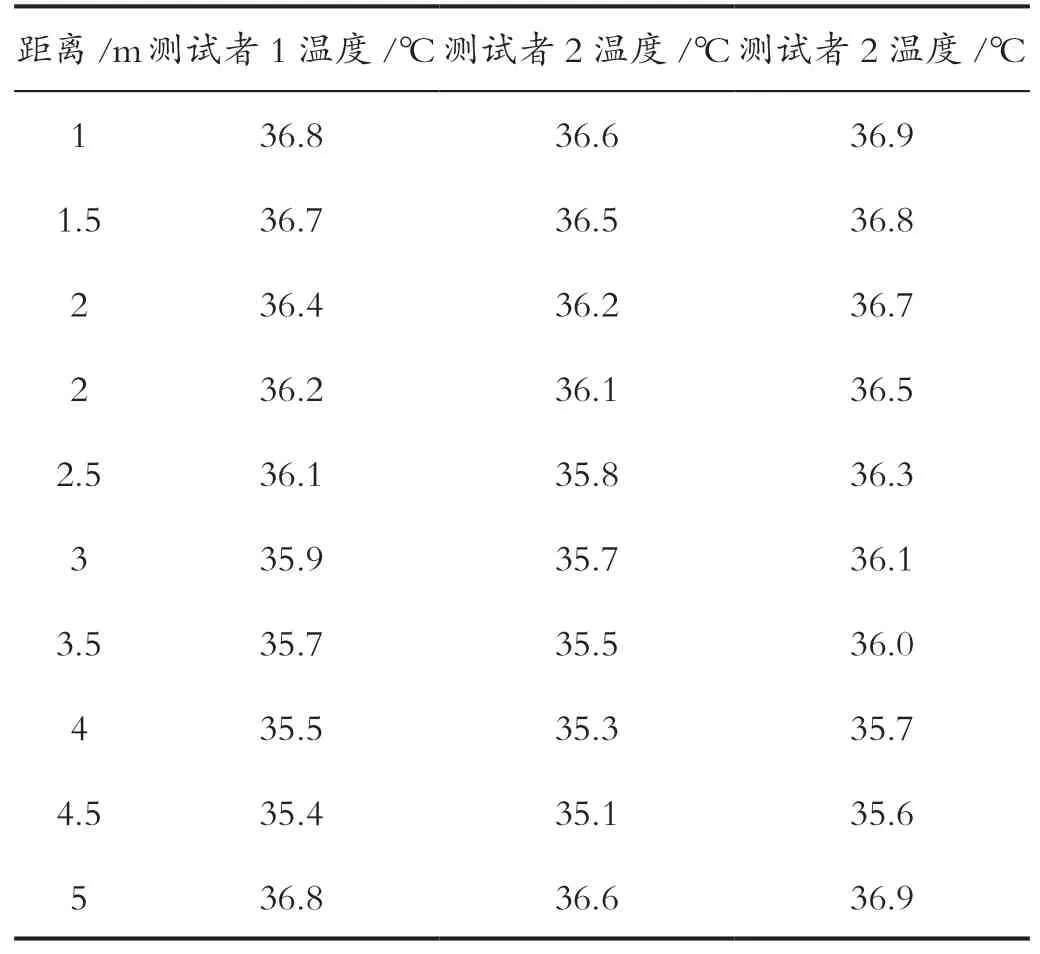
表1 不同距离人体额头温度测量结果Tab.1 Measurement results of human forehead temperature at different distances
引用
[1] 陈洪富.城市房屋建筑装修震害损失评估方法研究[D].哈尔滨:中国地震局工程力学研究所,2008.
[2] 科技部印发《“十三五”公共安全科技创新专项规划》[J].中国应急管理,2017(4):32-35.
[3] 陈媛.六足移动机器人的仿生机构设计与运动学分析[D].天津:河北工业大学,2015.
[4] 赵爽宇.四足仿生机器人步态控制与切换策略分析[D].成都:电子科技大学,2014.
[5] 陈炜,马利,王立柱.救援机器人通信系统的应用和发展研究综述[J].消防科学与技术,2016,35(8):1117-1120.
[6] 李爽,李佳学,于春洋,等.灾后救援机器人的设计研究[J].哈尔滨商业大学学报(自然科学版),2021,37(1):26-30.
[7] 严凤花,严兴科,何天有.医用红外热像技术的应用研究进展[J].红外技术,2014,36(6):433-438.
