小型调频连续波雷达优化设计与性能分析*
2022-09-24穆文星
蒋 俊,穆文星,方 璐,刘 涛
(海军工程大学 电子工程学院,湖北 武汉 430033)
0 引言
传统脉冲体制雷达重量体积大、能耗和成本高,只能在实验室、厂家或者部队等特定场地使用,难以因地制宜地在日常使用和大规模推广,比如应用于普通高等院校现场教学等。调频连续波(FMCW)雷达具有测距精度高、体积小、成本低和能耗低等优点,逐渐应用于日常生活的各个领域。2011 年麻省理工学院(MIT)林肯实验室开设了一门制作FMCW 雷达的公开课程(Open Course Ware)[1-2],通过搭建小雷达和一系列现场测试,培养学生对应用电磁学、射频(RF)电子设备、模拟电路、信号处理和其他相关主题的兴趣,取得非常好的效果。该FMCW合成孔径雷达(SAR)系统使用Mini-Circuits 系列射频组件,改造搭建一套载频2.4 GHz、带宽287 MHz 的FMCW雷达系统,用于教学实践,并引起了相关人员广泛的研究兴趣[3-5]。特别是宁波诺丁汉大学A.Melnikov 教授团队,对MIT 咖啡罐雷达进行深入研究改进。但目前还存在以下难题:(1)咖啡罐天线增益较低,信号回波强度较弱,影响后续的目标参数测量和成像结果。(2)原系统的调制电压面包板电路容易造成接触不良,性能不够稳定。(3)当前大部分笔记本电脑音频线插口麦克风和耳机插口合二为一,无法进行双声道采集,采集不到触发信号。(4)MIT 咖啡罐雷达测速只能通过距离除以时间得到目标运动的平均速度,无法计算出目标瞬时速度。(5)MIT 设计的咖啡罐雷达在合成孔径成像的实验中采用模拟脉冲SAR“停-走-停”的方式成像。将雷达固定在等间隔位置采集目标信号,模拟脉冲SAR 在收发信号过程中静止不动的假设,对采集信号进行数据处理,完成成像。MIT 咖啡罐雷达开源课程设计的雷达在成像采集数据过程非常复杂,成像效果不佳,不易于推广使用。
相比于MIT 咖啡罐雷达,本文主要在收发天线、调制电压产生电路、电脑音频插口、测速功能、成像算法5个方面对连续波雷达进行优化和改进:(1) 该系统主要采用阵列贴片天线,相比于原来的咖啡罐天线,信号增益更强,增加该系统作用距离;(2)原有的面包板电路容易造成接触不良,该系统调制电压产生电路采用电子线路板,性能更加稳定,在长时间外场试验中能够保证电路的稳定性;(3)当前大部分笔记本电脑音频线插口麦克风和耳机插口合二为一,无法进行双声道采集,采集不到触发信号,该系统采购AD-2R 立体声数字音频转换器解决该问题;(4)该系统在分析数据时,提取某一时刻和相邻32 个周期的信号,使用RD 算法计算运动目标该时刻的瞬时径向速度;(5)该系统使用改进传统RD算法,增加使用滑轨连续运动的SAR 成像功能。
1 硬件优化设计
主要在收发天线、调制电压电路板、电脑音频插口3个方面进行优化设计。
1.1 收发天线改进
本套雷达系统在天线方面进行改进,改进阵列贴片天线与咖啡罐天线的实物图如图1 所示。
图1 阵列贴片天线与咖啡罐天线实物图
图1(a)是2×2 阵列贴片天线,图1(b)是咖啡罐天线。贴片天线是当前应用比较广泛的经典vivalid 宽频带微带天线,设计图如图2 所示。
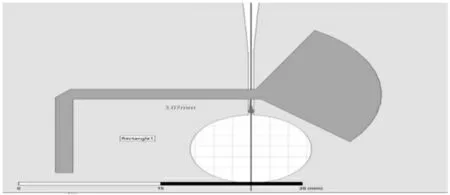
图2 单一贴片天线设计图
两种天线的三维方向图如图3 所示。图3(a)是阵列贴片天线的三维方向图,图3(b)是咖啡罐天线的三维方向图。
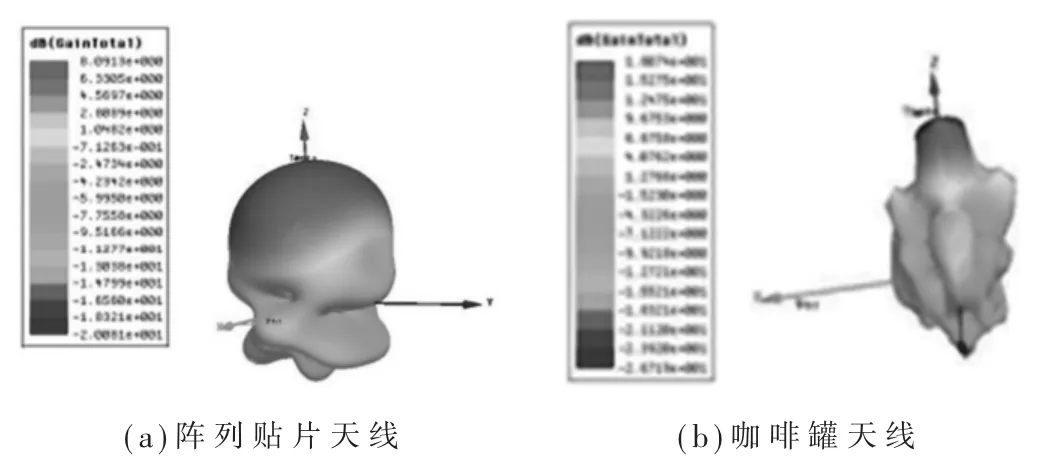
图3 两种天线的三维方向图
分别使用两种天线对同一位置的同一目标测距,得到距离频谱如图4 所示。

图4 阵列贴片天线与咖啡罐天线对应同一目标距离频谱图
图4(a)为阵列贴片天线对应的距离频谱图,频谱绝对值最大值约为2.97;图4(b)为咖啡罐天线对应的频谱图,频谱绝对值最大值约为2.44。外场实测实验结果显示,使用阵列贴片天线时目标回波信号更强,即阵列贴片天线对信号增益更强,探测距离更远。
1.2 调制电压产生电路改进
调制系统以16 引脚芯片XR 2206 为核心,压控振荡器是美国Mini-circuits 公司推出的S 波段压控振荡器ZX95-2536C-S+,根据压控振荡器与调制电压的对应关系,通过控制调谐电压来控制所产生的发射信号的载频。调制电压集成电路图如图5 所示。
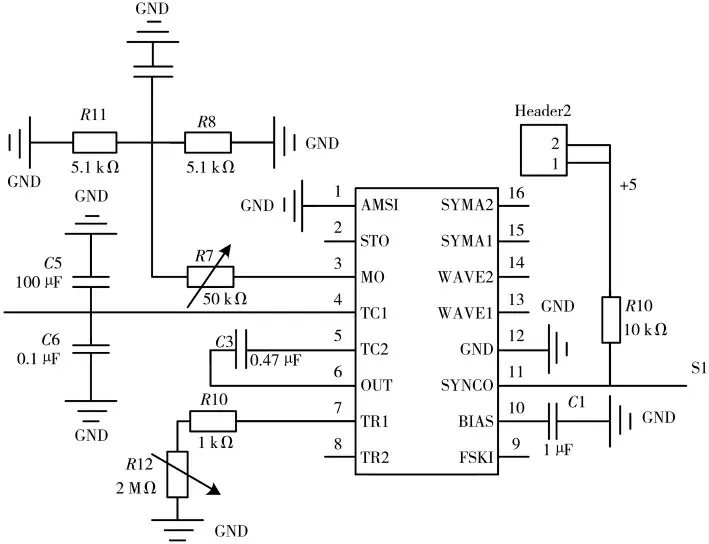
图5 调制电压集成电路图
MIT 雷达系统调制电压产生电路使用的是面包板,本系统使用的是电子线路板,具体实物图如图6、图7 所示。
如图6 椭圆标记所示,MIT 咖啡罐雷达调制电压产生电路使用面包板电路,该电路稳定性不强,在长期外场实验中可能会出现因接线松动导致接触不良,影响实验效果。图7 是电子线路板调制电压产生电路,电路连线非常清晰,有助于学生学习了解电路结构,在长时间外场实验中,电路性能比较稳定,效果良好。
图6 面包板调制电压产生电路
图7 电子线路板调制电压产生电路
1.3 电脑音频插口改进
为便于本套系统在多种场景下进行实验,使用笔记本电脑采集数据进行计算。当下大多数笔记本电脑追求轻便,将音频插口耳机和麦克风合二为一,使用电脑内置麦克风,插口用于耳机输出声音信号。本套系统利用音频采集软件将去调频后的回波信号转换为数字信号,麦克风插口是采集数据的关键,本系统为解决多数笔记本电脑无法采集数据的问题,采购AD-2R 立体声数字音频转换器调音录音设备[2]。具体实物如图8 所示。

图8 AD-2R 立体声数字音频转换器调音录音设备实物图
使用3.5 mm 音频线连接信号采集口和如图8 所示音频输入接口,中频信号将传输到该设备,该设备将中频信号通过OTG 传输到电脑USB 接口。解决电脑音频插口问题,使本套系统在使用时更加方便,更易于推广使用。
2 算法优化设计
主要对原来的速度测量方法和静止状态的采样成像方法进行了改进。
2.1 改进速度测量方法
MIT 咖啡罐雷达只能计算距离时间图,通过读取距离差和时间差计算目标平均运动速度。系统脉冲压缩主要采用频率分析法,将回波线性调频信号和具有相同频率调频斜率的线性调频参考信号共轭相乘,称之为“去调频(Dechirp)”处理[6]。去调频后获得目标的差拍信号,该信号是与回波延迟时间t 有关的单频信号,在频域上进行FFT 即可实现对目标的脉冲压缩[7]。本套系统使用RD 算法,截取采集信号的32 个相邻周期的信号,在快时间域进行FFT 后,在慢时间域进行FFT 即可求得该时刻的速度,具体实验情况在实验结果中详细介绍。
2.2 距离多普勒(RD)成像算法分析
该系统主要研究正侧视情况下SAR 成像,其几何模型如图9 所示。
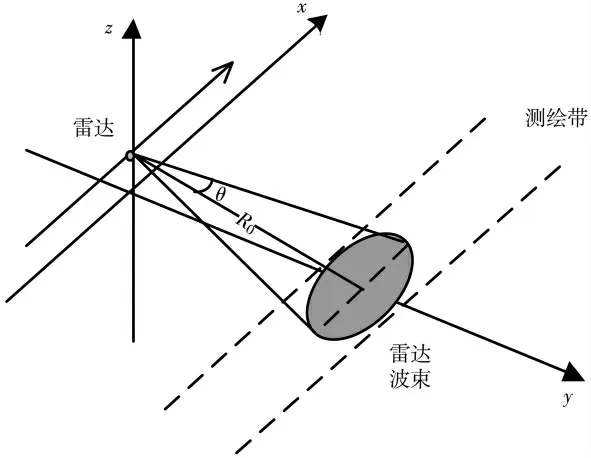
图9 正侧视FMCW SAR 成像集合模型
本文FMCW SAR 成像实验未使用机载平台,选取一定高度台阶放置滑轨作为雷达运动轨迹,如图9 所示本文实验过程中使用的正侧视模型俯视角接近0°,可以有效减少杂波对成像结果的影响。
传统的脉冲SAR 主要采用RD 成像算法,脉冲SAR信号脉宽在微秒级,在处理信号时假设雷达在发射和接收信号时雷达位置固定不动,即“停-走-停”假设。MIT开放课程在FMCW 雷达成像处理时模拟脉冲SAR 的成像方法,将雷达固定在等距离的59 个点上采集信号,然后进行成像处理,整个过程操作起来比较繁琐,成像质量不太理想。本套系统首先复现MIT FMCW SAR 成像过程,然后改进传统RD 成像算法[8],适用于连续运动FMCW SAR 成像,算法流程图如图10 所示。
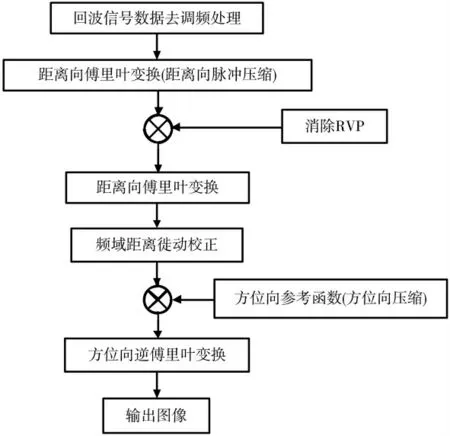
图10 FMCW SAR 成像算法流程图
在信号处理过程中主要是信号相位的计算,和信号幅度无关,为方便计算,在计算过程中将信号幅度系数统一设为1。发射信号为:

式中x 为雷达实时坐标,η 为慢时间,f0为发射信号中心频率,t 为快时间,K 为调频斜率。接收信号为:

其中,R(t)为接收信号时雷达和目标的瞬时距离。

去调频后的信号为s(t,η)。
式中Rref为参考距离,tref为参考距离回波延迟。其中第一个指数项为方位项信息,主要是在方位压缩时进行计算;第二个指数项是FMCW 雷达在运动期间产生的多普勒频率;第三个指数项为距离向信息,在距离压缩时进行计算;最后一个指数项为剩余视频相位(RVP),是由于去调频处理时回波延迟不同所引起的,影响成像质量[9-10]。
脉冲压缩后的信号变为:
省略常数项,消除RVP 并进行距离徙动校正后信号变为:

式中fη为方位向频率分辨单元,在本套系统中为脉冲重复周期,fη=1/T。在方位向进行压缩,然后通过逆傅里叶变换即可得到输出图像。
2.3 改进运动导轨实现SAR 成像
为实现FMCW 雷达连续运动SAR 成像,改进运动导轨,雷达系统和运动导轨实物图如图11 所示。导轨是通过驱动电机带动皮带匀速运动,将皮带和雷达系统底座固定在一起,从而控制雷达系统做匀速直线运动,对目标区域进行SAR 成像数据采集。具体实验情况在实验结果中详细介绍。

图11 雷达系统和滑轨实物图
3 实验结果
本节主要进行了实际目标的参数测量、滑轨连续运动SAR 成像的仿真实验以及实际成像分析。
3.1 测距测速实验结果
该系统使用Adobe Audition CC 2015 音频采集软件采集中频信号,采集信号的界面如图12 所示。
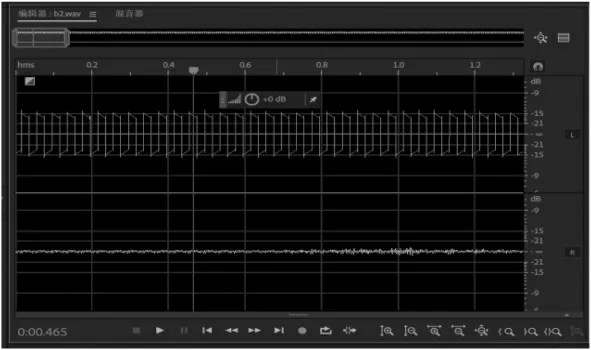
图12 音频软件数据采集示意图
如图12 所示,音频软件采集数据的采样率为44.1 kHz,数据采集分左右声道,左声道为触发信号,判定是否发射信号,作为同步信号,与接收信号保持相位一致,是脉冲压缩的保障。右声道为混频后的中频信号,在MATLAB中计算后得到需要的结果。本套系统载频为2.4 GHz,带宽为287 MHz,实验过程中三角波周期最短为10 ms、最长为40 ms,实验目标距离在50 m 以内,最大径向速度在20 m/s 以内。根据计算,目标在最远距离以最大速度运动时产生的差频信号最大为19 183 Hz,根据奈奎斯特采样定律,采样率为44.1 kHz 不会造成信号失真。在后续实验中如果目标距离增加或者缩短信号周期,会相应调整采样频率,保证音频采集软件采集信号不会失真。
测距测速外场实验具体实验场景如图13 所示。

图13 测距测速实验场景图
如图13 所示,一个人从FMCW 雷达系统处远离该系统做近似匀速直线运动,12 s 时开始折返,以相同速度朝该系统运动。通过采集数据计算,得到目标距离时间图如图14 所示。
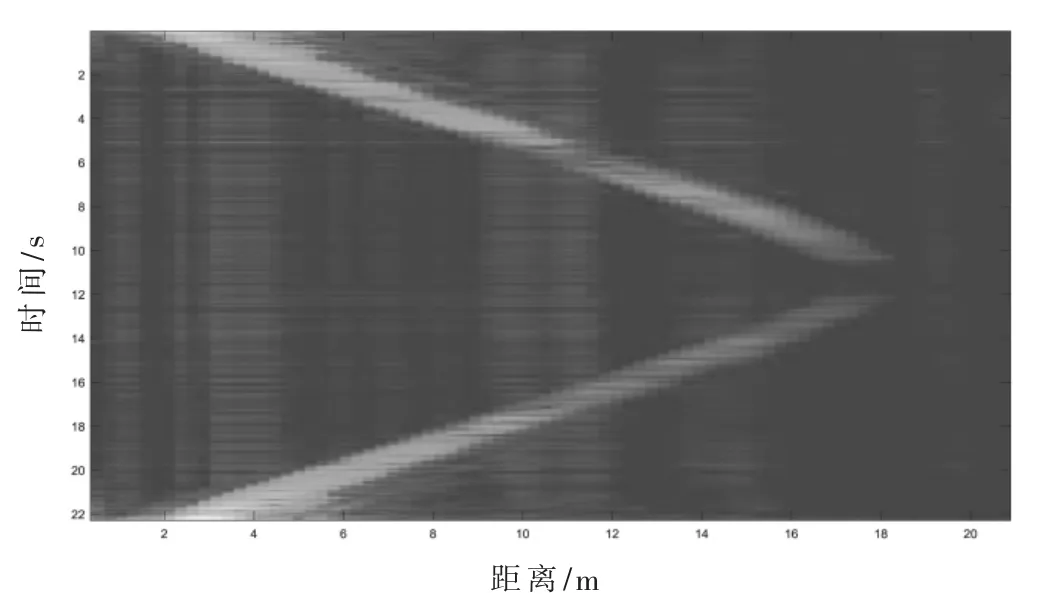
图14 运动目标速度距离图
如图14 所示,横坐标是运动目标距雷达系统的距离,纵坐标是时间,MIT 咖啡罐雷达测速通过距离除以相应的时间推算出运动目标的速度。
本系统增加使用RD 算法计算运动目标实时速度,选取任意时刻相邻32 个周期信号 (因为如果选取64 个周期,运动目标移动距离超过1 个距离单元,计算结果会有偏差;如果选16 个周期,速度分辨率较大,测速误差大),在快时间域进行FFT 后再在慢时间域进行FFT 计算,计算出目标的实时速度。本文选取8.68 s 时刻目标的运动数据进行计算,得到该时刻目标频谱如图15 所示。
如图15 所示,X 轴表示目标距离,Y 轴表示目标径向运动速度,远离雷达方向速度为正值,靠近雷达方向速度为负值,Z 轴表示频谱幅度值。结果表示8.68 s 时刻该目标以1.42 m/s 的速度远离雷达运动,整个过程中平均速度为1.45 m/s。选取不同时刻计算目标运动速度结果如表1 所示。
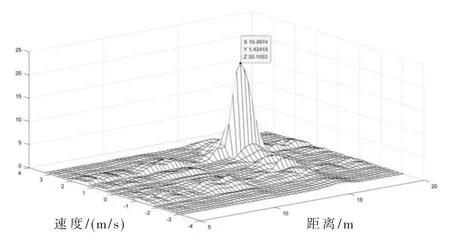
图15 运动目标速度距离频谱图
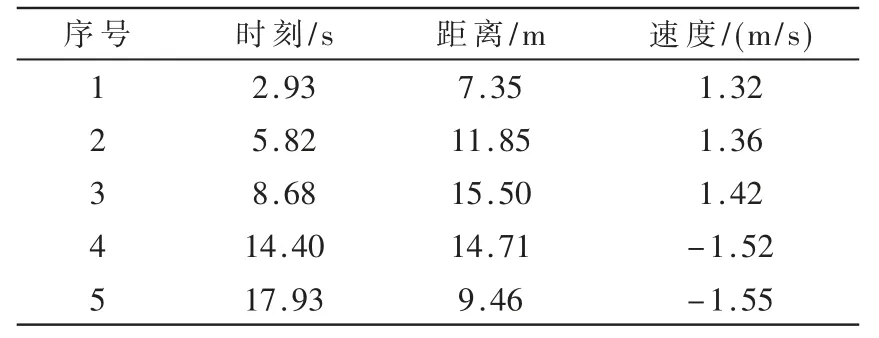
表1 不同时刻目标运动速度表
从表1 数据可知,本套系统使用RD 算法测量目标实时速度在误差范围内,可以较好地实现对目标实时测速功能。
3.2 滑轨成像算法仿真
在搭建系统后,针对该系统的各项参数,在MATLAB上对2 个点目标进行FMCW SAR 成像仿真实验,用于对外场实验提供理论指导和技术支撑,实验参数如表2所示。点目标仿真成像图如图16 所示。
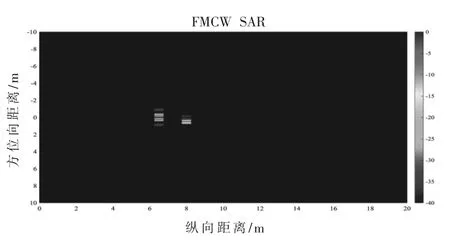
图16 FMCW SAR 连续运动仿真实验图像
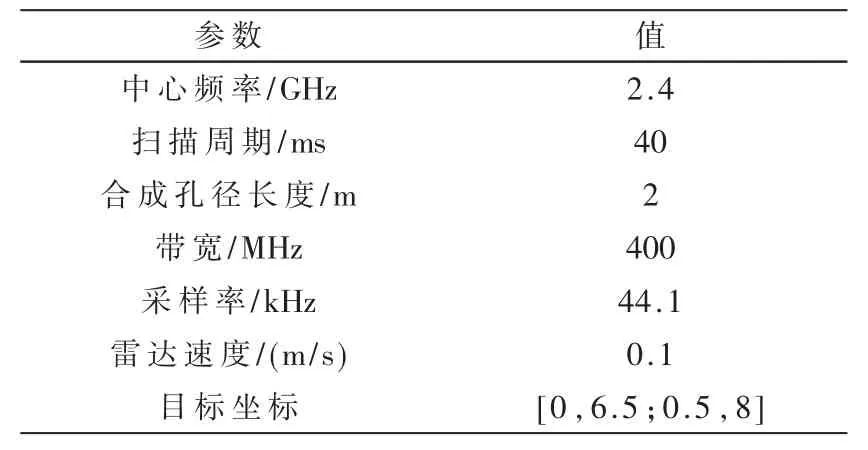
表2 FMCW SAR 成像仿真参数
通过仿真实验验证,系统编写的改进RD 算法在FMCW SAR 成像中具有良好的效果,可以用于外场实验。
3.3 SAR 成像实验结果
本文外场实验场景如图17 所示。
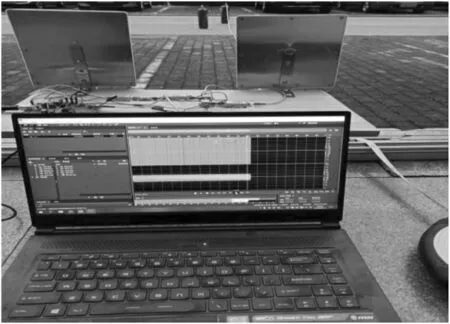
图17 SAR 成像外场实验场景图
复现MIT 模拟“停-走-停”SAR 成像的频谱图和成像图结果如图18、图19 所示。本文在数据处理时,消除目标范围以外的回波信号,仅对目标范围以内的信号进行处理。图18、图19 是在图16 场景下,2 个灭火器分别在6.5 m 和8.5 m 处的SAR 成像频谱图和成像图,从图中可以明显看出,在MIT 基于“停-走-停”假设的FMCW SAR 成像中,方位向压缩不完整。该“停-走-停”模式只是依靠人控制雷达在固定的位置采集信号,操作过程比较繁琐,方位向压缩的信号数量较少,相同信号强度下,频谱峰值不超过20,信噪比较低,目标距离增加或者目标反射强度变弱,信号将很难被分辨出来,严重影响SAR成像作用距离。
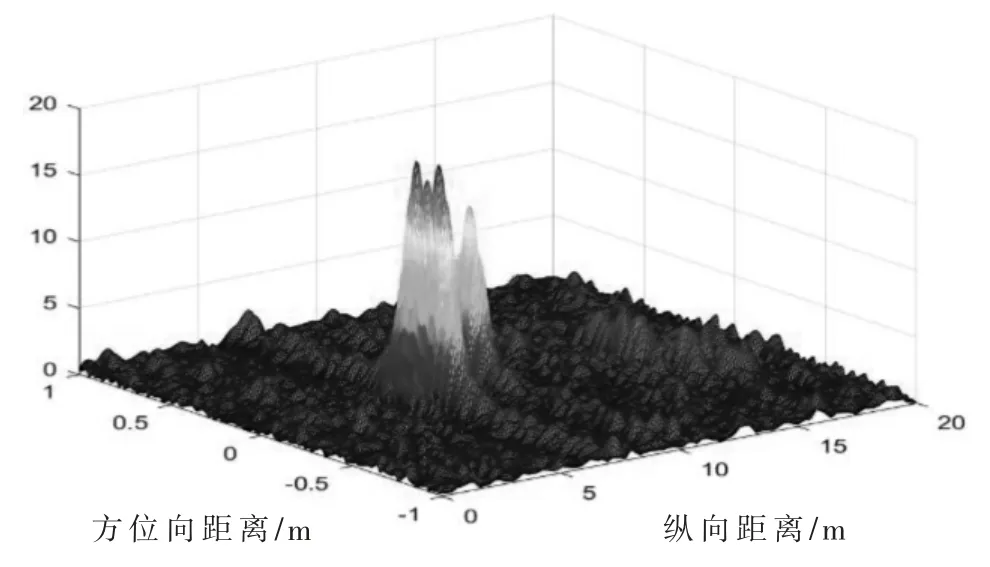
图18 停-走-停SAR 成像频谱
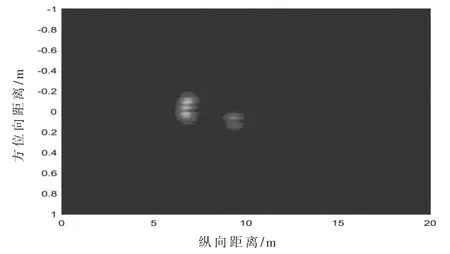
图19 停-走-停SAR 成像图
相同场景下,本系统控制雷达在2 m 长导轨上做匀速直线运动时采集回波信号,使用改进RD 算法,得到最终频谱和成像图如图20、图21 所示。本文在数据处理时设置一个门限,滤除杂波信号和旁瓣信号。
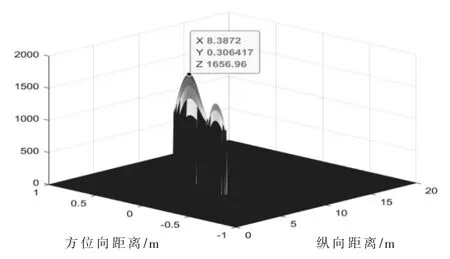
图20 改进RD 算法SAR 成像频谱图

图21 改进RD 算法SAR 成像图
如图20 所示,频谱峰值达到1 657,通过比较,信噪比远大于MIT 的系统的信噪比。实验结果显示该套FMCW 雷达系统相较于MIT 咖啡罐雷达成像操作简单,成像效果更好。
4 结论
本文采用微波器件模块化集成系统,借鉴MIT 咖啡罐雷达,优化设计并搭建一款应用于教学实践的低成本小型FMCW 雷达系统。该系统在天线设计、调制电压产生电路、电脑音频插口、测速方法和SAR 成像方法5 个方面进行改进,提升系统的稳定和性能,能够实现测量运动目标瞬时径向速度和对静止目标SAR 成像,能够满足日常教学实践需求。未来将继续优化改进该系统,提升测距、测速和SAR 成像精度,应用于测绘和地质勘探等社会生活领域。
