高超声速/常规巡航导弹预警探测特征比较*
2022-09-24郑建成谭贤四曲智国何文琳李志淮
郑建成,谭贤四,曲智国,何文琳,李志淮
(1.空军预警学院,湖北 武汉 430019;2.中国人民解放军95246 部队,广西 南宁 530007;3.中国人民解放军联勤保障部队,湖北 武汉 430019)
0 引言
临近空间高超声速目标(near space hypersonic target,NSHT)因具备速度快(Ma5 以上)、攻击距离远、机动范围广的特点,使得远程精确闪击作战成为现代战争新的作战方式,对国土防御提出了新的更大挑战。根据所提供动力方式的不同,NSHT 可分为2 类:高超声速巡航导弹(hypersonic cruise missile,HCM)和高超声速滑翔飞行器(hypersonic gliding vehicle,HGV)[1]。其中HGV 发展更为成熟且已列装,而关于HCM 的研究较少,本文重点关注HCM类目标。
HCM 的动力方式和飞行过程与典型的亚声速或超声速巡航导弹(cruise missile,CM)类似,通常是在火箭助推器上加速爬升,然后使用发动机通过大气层为自己提供动力进行巡航飞行,最后俯冲攻击目标,两者机动能力有限且射程相当[2-4]。不同的是,HCM 处于更高的临近空间且速度更快。从美国的弹道导弹防御体系架构[5]可以看出,现有预警探测体系针对导弹的预警手段主要有红外和雷达,其发展策略已比较明晰,但对HCM 的预警探测性能如何、存在什么问题以及与预警探测CM 有何区别还有待深入研究。
目前,国内外学者基于目标运动特性和红外特性开展的HCM 与CM 可探测性问题研究已取得一系列成果,主要可分为4 类:一是对HCM 速度快与CM 低空突防能力强等运动性能所作的定性描述[6-7],指出防御难点;二是针对目标红外辐射特征明显,通过建立目标红外辐射工程模型计算其蒙皮、尾焰、尾喷口的红外辐射强度[8],参考美国天基红外探测器的灵敏度参数构建天基红外卫星探测模型[9-10]、临空基飞艇载红外探测模型[11]和空天红外探测模型[12],进而探讨红外系统对目标的探测能力和时空覆盖性问题;三是针对目标飞行高度较低研究平流层飞艇载雷达[13]、地/海基组网雷达[14]等不同传感器平台对其探测与跟踪性能;四是在分析目标运动特性和辐射特性的基础上,设计不同平台的红外和雷达探测器构成的预警探测系统总体结构,分别探索2 类目标预警探测系统构建相关问题[12,15]。
上述研究成果对防御方认识HCM 与CM 的可探测性能具有积极作用。然而,这些研究或仅采取建模颗粒度过粗的定性分析使得防御方对目标性能认识不足,或仅针对目标巡航段特性开展定量分析,没有立足目标的全任务剖面,从体系的角度对探测此2 类目标的特征进行量化评估和比较,不利于防御方实施体系化的预警探测策略。为此,基于HCM 与CM 目标特性的不同,通过建立红外探测模型和雷达探测模型,详细和定量评估目标红外辐射强度、飞行速度和滞空高度对预警探测的影响,能够厘清防御方对来袭目标性能的认识,进而为严格定量评估高超声速武器系统的威胁和升级现有反导预警体系提供技术支撑。
1 目标性能建模
为比较红外和雷达2 种探测手段对HCM 与CM预警探测特征的不同,需要在分析目标运动特性的同时,分别建立红外探测模型和雷达探测模型。
1.1 运动模型
HCM 任务剖面如图1 所示。根据推力类型的不同,其任务剖面分为固体火箭助推的助推段、超燃冲压发动机推进的爬升段和巡航段以及无推力俯冲飞行的俯冲段。在固体火箭助推下,飞行器从一定的高空投射点处开始飞行上升至超燃冲压发动机要求的点火窗口后,助推器分离,超燃冲压发动机点火提供推力后快速爬升,当爬升至巡航要求的高度、速度和相应角度时,利用剩余燃料进行巡航飞行,巡航段结束后,飞行器开始无动力俯冲飞行,并最终实现对地面指定目标的打击[16]。
图1 HCM 任务剖面Fig.1 Mission profile of HCM
在不考虑地球自转引起的离心力和哥式惯性力的条件下并忽略侧向运动,其质心运动方程为[16]式中:v为速度;γ为航迹倾角;κ为航向角;Ψ为经度;Ω为纬度;h为目标高度;R为地球半径;g=g0R2/(R+h)2为离地面h处的重力加速度,g0=9.8 m/s2为海平面处重力加速度;α,σ分别为飞行器的攻角和倾侧角;D=12ρv2CdA为 气动阻力,L=12ρv2ClA为气动升力,ρ=ρ0exp(-h/H)为大气密度[17],ρ0=1.752 kg/m3,H=6 700 m;A为飞行器的有效横截面积;Cd,Cl分别为升力系数和阻力系数;m为飞行器的质量;T为发动机提供的推力。
1.2 红外探测模型
根据热量守恒定律,大气层内高速飞行的飞行器在大气阻力作用下失去的部分动能会转移到飞行器周围的空气中,使其产生强烈的气动热,部分热量沉积到飞行器表面导致其温度急剧升高,引起大量的红外光谱热辐射,其辐射强度I在温度为T时的计算公式[17]为

式中:ε为表面辐射率;λ为波长;c为光速;h=(6.625 6 ± 0.000 5) × 10-34(W · s2)为普朗克常数;k=(1.380 54 ± 0.000 18) × 10-23(W · s · K-1) 为 玻尔兹曼常数;θ为飞行器表面面元与表面法线方向的夹角;A为对飞行器表面观测面积;温度T的单位为K。
导弹飞行过程中,其红外辐射强度I超过一定数值,红外探测器就能探测到其飞行。考虑地面背景辐射和低空大气背景辐射的影响,红外探测器在探测波段内对辐射强度为It的飞行器的探测距离[12]可表示为
式中:δ为信号提取因子;Ib为探测波段内的背景辐射强度;A0=πd2/4,d为光学系统的有效通光孔径;τa为目标与传感器间的大气透过率;τ0为光学系统的透射率;D为探测器的探测度;SNR为探测到目标所需的最小信噪比;Δf为探测系统的噪声等效带宽;Ad为探测单元面积。
1.3 雷达探测模型
作为导弹防御系统中关键的传感器,雷达的预警探测能力受到自身探测威力和地球曲率等因素的制约。其搜索距离方程[18]为

式中:Pav为平均发射功率;A为天线有效反射面积;σ为目标RCS;ts为雷达探测距离为Rmax时完成空域Ω的搜索任务所需时间;Ls为雷达系统损耗;k为玻尔兹曼常数;Te为等效噪声温度;SNR为回波信噪比。
为研究雷达搜索时间资源使用情况,式(4)可写为

式中:a=,对 于特定的雷达和 目 标而言,a是已知且固定的。
雷达在观测目标时,可用目标位置参数描述雷达观测模型。设雷达到目标的距离为R,雷达与目标连线在雷达当地水平面内投影与正北向夹角为α,雷达—目标连线与雷达当地水平面的夹角为β,雷达位置坐标为(x,y,z),则雷达观测模型[19]为
式中:NR,Nα和Nβ为观测噪声。
同时,考虑地球曲率的影响,雷达探测视距计算公式[20]为

式中:雷达平台高度h1和目标高度h2的单位为m,计算出的雷达视距L的单位为km。
2 预警探测特征比较
HCM 的战略意义取决于其相对于CM 的性能优势,关键的性能参数有纵向射程、飞行高度、滞空时间和红外辐射强度等,这些参数表征了其低空突防和快速打击能力,直接影响着防御方对该类目标的预警探测策略。根据导弹飞行任务时序和作战距离相当与否,可分别对HCM 与CM 的红外和雷达预警特征进行量化对比分析,从而评估反临预警探测的性能。HCM 的典型型号有美国的X-51A[21](验证机)和俄罗斯的Tsirkon[22],CM 的典型型号有美国的BGM-109,AGM-86C,AGM-129 和俄罗斯 的SA-15,KH-55,BrahMos[22-24]。为便于分析,表1总结了HCM 和CM 的典型性能指标。
2.1 红外预警探测特征比较
2 类巡航导弹均在大气层内飞行,红外探测背景均为低空大气背景和地面背景,红外探测器对其最佳探测波段为中波波段[8-12]。不同的是,2 类导弹不同的巡航速度将使其产生不同的辐射能量,由表1 可知,HCM 巡航速度是CM 巡航速度的近10 倍。为量化评估这2 类目标红外预警探测的差异,根据表2 和表3 给出的红外探测器在中波波段的性能参数和弹体最大辐射温度[8,11-12],通过式(2)和式(3)计算HCM 和CM 在典型巡航高度时的最大辐射强度、最大探测距离,表3 给出了空基红外探测器探测巡航段HCM 和CM 的性能对比情况。

表1 2 类巡航导弹目标典型性能指标Table1 Typical performance indexes of the two kinds of cruise missile targets
从以上分析可知,根据HCM 与CM 所处飞行环境即红外探测背景的特点,空基红外探测器在中波波段对该2 类目标均具备较好的持续探测捕获能力。由于HCM 与CM 巡航速度、巡航高度和背景辐射强度差距较大,且大气透过率随着海拔高度升高而增大,导致HCM 的最大红外辐射强度虽然远大于CM 的最大红外辐射强度,但是红外探测器对HCM的最大探测距离仅为对CM 最大探测距离的约7 倍。由此可见,探测平台类型相同时,巡航速度更快、高度更高的HCM 将使得红外探测器对其探测距离大大增加,同时红外探测器对HCM 的预警时间较CM仅仅多了23 s,这就使得红外探测器在距防御方相同距离处同时发现2 类目标时,其探测HCM 的性能优势并不明显。
从表3 可知,当导弹的射程在1 000 km 左右时,空基红外探测器可对HCM 提供良好的持续预警探测能力,但对CM 的最大探测距离仅238 km,不足以对其持续跟踪探测;当导弹的射程超过1 100 km时,空基红外探测器无法对HCM 进行持续跟踪探测,且对CM 的探测能力更加不足。但此时可考虑采用其他类型平台的红外探测器对目标进行探测。根据表2 给出的红外探测器参数,与表3 空基红外探测器探测性能的计算方法类似,表4 给出了不同平台搭载红外探测器[8-11]对2 类目标的探测性能。从表4 可见,红外探测器对目标的探测能力将随着红外搭载平台高度的增加而显著提升。因此,当导弹的射程在1 000 km 以内时,对HCM 可采用浮空气球、预警机等空基平台搭载红外探测器进行红外探测,对CM 则需采用天基红外探测器进行红外探测;当导弹的射程超过1 100 km 时,对HCM 可采用飞艇载红外系统组网或天基红外探测器进行红外探测,而对CM 即使采用天基红外探测器进行探测也仍显能力不足,此时需考虑采用不同探测平台搭载红外探测器进行组网联合探测。
表2 红外探测器参数Table 2 Performance parameter of infrared detection system
表3 红外探测性能对比Table 3 Comparison of infrared detection performance
表4 不同平台红外探测器探测距离对比Table 4 Comparison of detection range for infrared detectors on different platforms km
2.2 雷达预警探测特征比较
尽管理论上红外探测器对巡航类导弹目标具备探测能力,但其发展并不完备,很有必要对相对发展成熟的地基雷达系统预警探测2 类巡航导弹目标的差异进行比较分析。
随着电子科学和军事技术的飞速发展,反导雷达普遍具备数百千米甚至上千千米的探测威力。以美国“萨德”反导系统中的AN/TPY-2 X 波段固体有源多功能相控阵雷达[25]为例,通过雷达方程计算其对雷达散射截面积(radar cross section,RCS)为0.004 m2的目标探测距离可达1 000 km,而HCM 与CM 在不同探测角度时的RCS 取值情况如表5 所示[26-28]。从表5 可知,HCM 的RCS 平均值为0.01~0.1 m2,CM 的RCS 典 型 值 约0.1 m2,HCM 的RCS 起伏较大是由于受等离子鞘套的影响,在特定观测视角(正侧视、前视或后视)时其影响(衰减或增强)可达20 dB,而CM 不受等离子鞘套的影响,其RCS 波动并不明显,但正侧视时2 类目标的RCS 均较大。可见典型参数条件下雷达探测威力满足对2 类巡航导弹目标的探测要求,此时对目标探测的影响更多受限于雷达视距,因而需重点分析雷达视距问题。
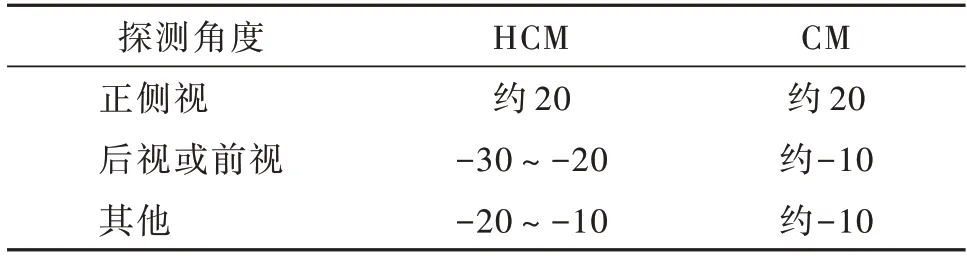
表5 目标RCS 对比Table 5 Comparison of RCS dBsm
与CM 相比,HCM 最大的优势就是速度快,能够削弱敌人的反应时间。然而,CM 更低的飞行高度又大大降低了地基雷达系统对其探测距离。根据式(7),不考虑地形特征(假设地球表面是光滑的)和雷达架高时,对不同飞行高度的目标,雷达探测视距随目标高度的变化如图2 所示。显然,目标飞行高度越高,雷达视距越远。
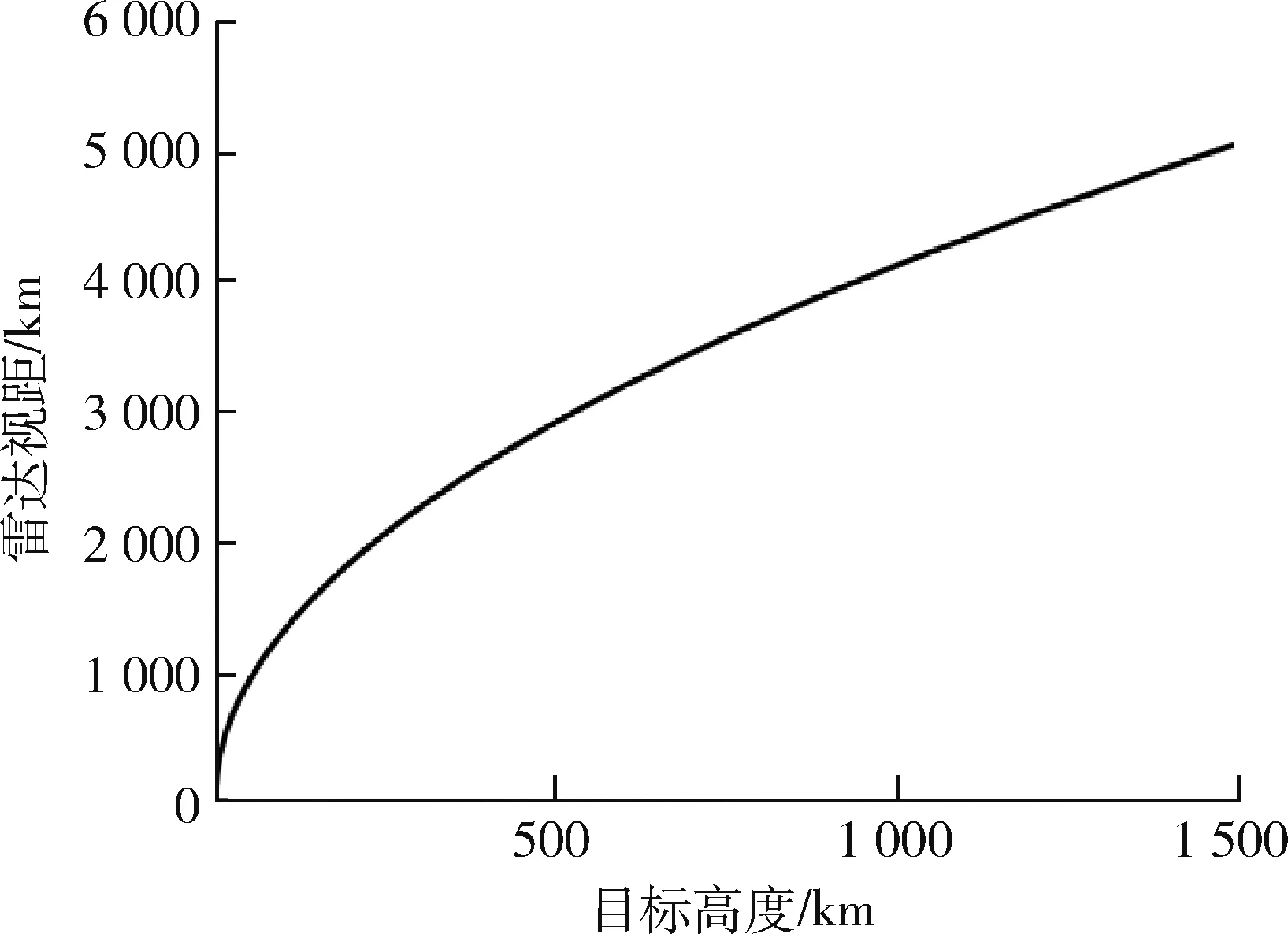
图2 雷达视距随目标高度的变化情况Fig.2 Variation of radar LOS with target altitude
根据式(1)所建立的HCM 运动模型和文献[23]给出的CM 运动模型,假设防御方雷达部署于导弹落点附近且探测威力足够,当目标与雷达之间的距离小于雷达视距时认为目标可探测,图3 给出了HCM 和CM 纵向射程均为900 km 时的雷达视距可探测情况,图中“◇”标示雷达视距可探测首点,加粗的弹道部分意为雷达可探测。
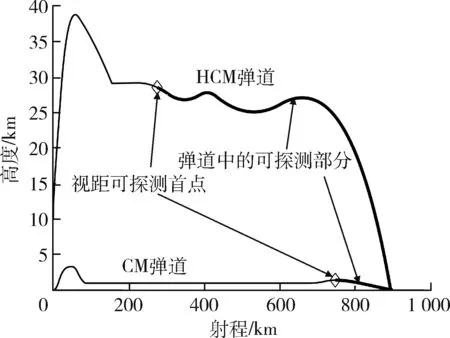
图3 视距可探测性对比Fig.3 Comparison of LOS detectability
防御方必须收到来袭导弹的预警才能采取有效的对策,对来袭导弹的预警时间取决于目标的特性和防御方的预警探测能力。由图3 可知,HCM 与CM 最显著的区别就是飞行高度的不同,这将直接影响雷达探测视距。根据对弹道数据的相应分析,其对射程均为900 km 的2 类目标的首点发现距离、目标速度、高度和可持续探测时间如表6 所示。
由图3 和表6 可知,CM 飞行高度较HCM 飞行高度低直接制约着对其的雷达可探测性性能。对部署在导弹落点附近的地基雷达,由于视距限制,雷达可探测到CM 时其飞行高度仅1.2 km,而HCM 在28.5 km 的高度时雷达就已可探测到其飞行,这使得雷达对HCM 的首点发现距离达到其任务航程的69%,而对CM 首点发现距离仅约为其任务航程的16%。虽然HCM 的飞行速度是CM 飞行速度的3.7倍,但由于CM 飞行高度低、可探测距离近,雷达对其提供的可持续探测时间仍然比速度是其数倍的HCM 要少32 s。若考虑地杂波的影响,则雷达探测CM 受地杂波的影响更大,将导致雷达对其可探测距离更近,可持续探测时间更短。此时从进攻方的角度看,CM 暴露给防御方的时间更晚、突防能力更强。但是,若防御方在同一距离处同时提前2 min发现HCM 和CM,则速度较慢的CM 目标留给防御方的反应时间将相对充足。
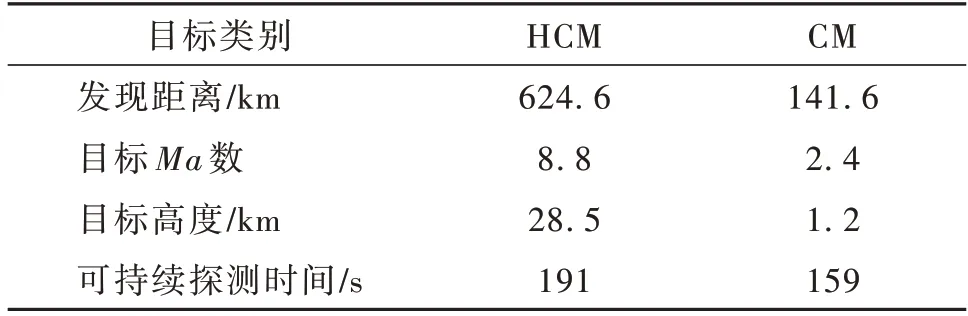
表6 雷达探测性能对比Table 6 Comparison of radar detection performance
综合上述分析,从雷达视距限制上看,地基雷达系统对HCM 预警作战可采用威力1 000 km 左右的新型多功能相控阵雷达(如AN/TPY-2),而预警探测CM 采用低空探测性能好的日常防空雷达即可,若采用远程预警雷达反而达不到物尽其用的军事效益。目前,对CM 探测可采用塔楼、系留浮空器、预警机、高空长航时无人机和近地卫星等平台搭载雷达系统来进一步增加视距和对目标的预警时间[24],但是对HCM 的雷达探测手段除了地基雷达外其他雷达平台则比较匮乏,可发展平流层飞艇载雷达提高对其探测能力。由此可见,从雷达探测平台上看,目前对CM 的探测手段较多,但对HCM 的探测手段较少。
3 结论
本文对可达相同射程的HCM 与CM 红外探测性能和雷达探测性能进行了定量比较与评估分析,主要研究了2 类目标红外辐射、滞空高度和飞行速度对防御方预警探测的影响,分析结果表明:
(1)红外可探测性方面,由于HCM 的辐射温度更高、红外辐射强度更大,空基红外探测器对HCM的持续覆盖和可探测能力更强,且随着红外探测器所搭载平台高度的增加(临空基、天基),其探测能力将进一步提升。
(2)雷达可探测性方面,相比HCM,虽然CM 飞行速度慢,但更低的飞行高度导致地基雷达对其首点发现距离更近,增加了尽早发现的难度,此时可采用系留浮空器、预警机等多种高空雷达平台增加对其探测能力。针对HCM 的高空雷达平台发展还不够完备,目前对CM 的雷达探测手段较HCM要多。
(3)预警时间方面,由于HCM 的飞行速度更快,其红外辐射特征较CM 更明显,红外系统对其稳定跟踪探测的距离更远,可持续探测时间更长。同时由于飞行高度相对较高,使得雷达对其预警时间较视距近的CM 要长,此时HCM 的优势并不明显。
上述分析结果有助于防御方深入思考预警体系探测HCM 与CM 之间的区别,从而进一步分析应对HCM 的预警探测策略,即首先利用红外探测器覆盖范围大、作用距离远的特点对HCM 进行捕获与持续跟踪,同时将捕获跟踪信息传输给地面雷达系统,当HCM 进入雷达视距内时交由地基雷达系统进行接力探测与跟踪。卫星对地基雷达的信息提示技术和如何减小交接误差将是下一步需要研究的课题。