双子电梯轿厢防碰撞技术分析与设计*
2022-09-22屈省源张继涛
屈省源,张继涛
(中山职业技术学院机电工程学院,广东 中山 528400)
0 引言
近几年来,超高层建筑物越来越多。建筑高度的增加带来了客流量的迅猛增长,随之而来,就会增加电梯运输的压力。当前,超高层建筑物的乘客运输依然采用单轿厢电梯方式,为了提高运输效率,不断增加电梯运行速度和轿厢容量。但是,提高电梯运行速度,给电梯的控制和构造带来了一系列问题;而增加轿厢容量,无疑需要增加电梯井道空间,这样会使建筑物的有效利用率降低,而且大载重轿厢对电梯的曳引机、控制系统等方面又提出新的要求。因此,这种仅依靠增加电梯的速度和轿厢的载客量的方式已不能满足超高层建筑运输能力的需求。为了提供超高层建筑客流量的运输效率,蒂森克虏伯公司提出了一种在一个井道中安装2个独立轿厢的双子电梯应运而生[1-5],每个轿厢都配有独立的曳引机、控制器、曳引绳、配重和限速器。
双子电梯的结构复杂,虽然具有更高的运输能力,但是运行规则更为复杂,如何确保双子电梯安全运行是该型电梯使用的首要条件。双子电梯安全性需要解决的关键问题有2个,即:(1)如何设定2个轿厢之间的最小安全距离,确保2个轿厢在彼此相向或者同向运行时不发生碰撞;(2)如何设定电梯的安全保护系统,确保电梯能在系统断电或者其他异常故障时,轿厢不会发生碰撞。
针对上述问题,本文提出一种冗余性的位置探测技术和优化控制技术,确保双轿厢运行的最小安全距离;在2个轿厢之间采用安全保护系统,并在井道增加辅助安全设备,避免2个轿厢在异常情况下发生碰撞。
1 双子电梯的双轿厢防碰撞运行分析
一般的双轿厢电梯系统有2种结构,即高速双轿厢电梯和双子电梯。
高速双轿厢电梯是通过在每一个井道中置入两个轿厢,即将一个轿厢永久地置于另一个轿厢之上,使两个轿厢在同一运程中同时载客并将他们运输至目的地。可以同时服务于奇、偶楼层,有效地将运载量提高了一倍。通过提高电梯系统的运载量,可以减少等候时间和运输次数,从而提高大楼的服务水平,或者可以选择减小电梯井道面积来扩大实用面积。
双子电梯[8]是两个轿厢共享导轨和厅门。每个轿厢都配有独立的曳引机、控制器、曳引绳、配重和限速器。双子电梯的两个轿厢在同一井道独立运行,当一个轿厢的乘客进出电梯时,其上或其下的另一个轿厢照常运行,乘客无需等待。为了使两个轿厢各自独立运行并减少不必要的等待时间,双子电梯采用了电梯智能化目标选择控制系统,通过减少停靠楼层和改善终端用户的服务水平来最大程度地缩短运行时间。
本文不涉及双子电梯的智能化目标选择控制系统,只探讨双子电梯双轿厢井道运行时的安全保护方法。
双轿厢防碰撞规定:(1)设定轿厢运行的最小安全距离速度,实时监测2个轿厢的相对位置,让它们之间的距离大于最小安全距离,当相对位置达到最小安全距离时,2个轿厢紧急停止,避免碰撞;(2)按照国家电梯制造与安装安全规范的标准要求,当双轿厢的电梯速度独立运行时,不能仅靠电梯的软件控制系统来确保电梯的运行安全,必须要结合安装在曳引机的制停系统和井道中的限速系统等多重安全保护措施来避免发生轿厢间的碰撞。
双轿厢防碰撞问题是双子电梯能够投入使用迫切解决的首要问题之一。双轿厢发生碰撞的主要原因是由于当轿厢相距较近时而相对速度又太高造成的,或者当电梯在异常情况下双轿厢失控,而电梯紧急制停系统缺失或者井道轿厢限速系统失效的情况下发生碰撞。所以为了避免碰撞的发生,应使电梯轿厢之间的距离始终大于安全运行距离,并采用多重安全措施。
基于以上规定,本文设计了一种双子电梯的双轿厢防碰撞系统,该系统由3部分组成,如图1所示。双轿厢电梯防碰撞系统主要通过传感器信息并以微控制器作为控制单元的核心,对执行器和其他部件进行减速和制动。其中,双轿厢相对位置检测模块主要通过传感器元件实时检测2个轿厢的相对距离,息并将该数据信息通过动态优化控制模块的微控制器进行处理分析,对数据处理结果发送到报警显示及执行保护模块,执行其他部件进行减速和制动。
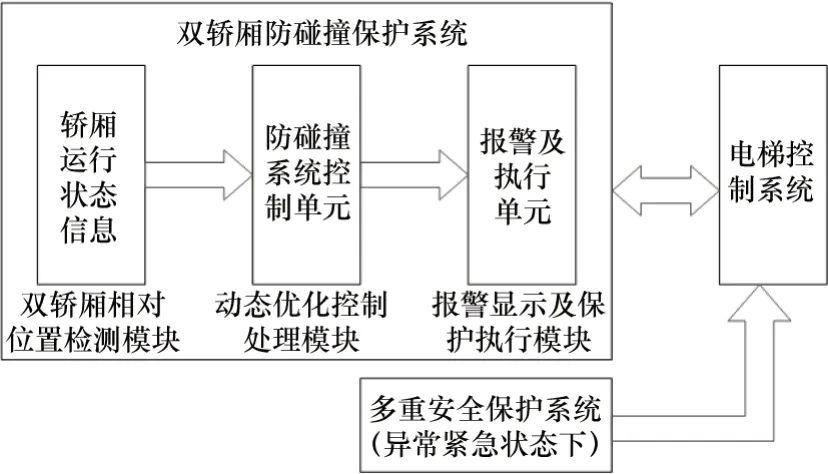
图1 双子电梯防碰撞结构
为了确保在异常情况下,防碰撞电子系统工作失效,在2个轿厢上和井道内安装多个轿厢速度保护部件,这些部件在检测到轿厢超速时,电梯主控系统根据超速信号向电梯主机发送制停命令,使电梯立刻停止运行,确保电梯使用安全。
在轿厢正常运行时,双轿厢相对位置检测模块不断获得轿厢的运动状态信息(速度、加速度和轿厢间距),轿厢间的最小安全距离是由轿厢运行时的运动状态参数决定的,经过信息处理单元得出的轿厢信息,运用安全度判别准则进行数据计算。根据不同的输出结果,该控制系统采取不冋的控制措施,例如,减速以及制动等。系统釆取紧急制动模式,避免轿厢发生碰撞,当轿厢间距大于安全距离时,系统回到正常运行状态。
当双轿厢防碰撞系统开始工作时,安装在上下轿厢上的传感器可实时测得上下轿厢的运行状态即速度、加速度和距离,将采集到的信息传给控制单元,计算出这时的临界安全间距再与实际轿厢间距进行比较。如果实际轿厢间距接近或等于临界安全轿厢间距,则控制单元发出信号控制报警单元报警,并使其中一个轿厢减速。如果实际轿厢间距小于临界安全轿厢间距,则控制系统进入自动刹车模式。
双轿厢防碰撞系统的工作过程具体如下。
(1)上下轿厢相对位置的测量。可用安装在上下轿厢上的传感器测出2个轿厢的相对位置和各自轿厢运行的速度、加速度等状态信息。
(2)安全间距的计算。以2个轿厢速度、加速度,目标轿厢速度、加速度为输入,按照动态优化控制算法来计算轿厢运行安全距离。
(3)输出报警显示。将实际轿厢间距与计算的安全间距进行比较,对2个轿厢所处的运行状态进行安全度判别预测。如果轿厢接近危险,则输出报警信号,此时2个轿厢开始减速,直至危险清除。
(4)智能制动。如果2个轿厢的实际测量距离小于或等于最小安全距离,那么轿厢就会进入自动减速或制动状态。
(5)防碰撞系统异常处理。当在防碰撞系统掉电或者任意一个轿厢速度超速时,安装在井道内的轿厢速度检测设备工作,将超速信号发送到电梯主控系统,主控系统发出紧急停止运行命令,电梯停止运行。当主控系统未能及时有效处理时,井道轿厢速度检测设备触发安装在轿厢导轨上的制停设备动作,确保轿厢停止。
2 冗余性轿厢位置传感器系统设计
为了以故障安全的方式确定电梯轿厢的当前位置和速度,Ahmad等[3]提出了基于神经网络优化算法确认多个轿厢之间的最小距离,有一定的指导性。为了保证系统在设定的最小安全距离下可靠工作,电梯系统设计应至少具有2个多样化的传感器系统,即具有不同的动作原理(硬件)和不同形式的数据交换的传感器系统,如光电编码器,实现冗余性的轿厢位置实时探测功能。每个传感器系统都提供有关位置(绝对位置)和速度的测量值。在将这些值用于有关碰撞预防和碰撞预防装置的其他功能的计算之前,首先在可编程电子安全系统中检查这些值的合理性。如果检测到不同传感器系统的传感器测量值之间的差异,即传感器测量值本身是异常的,则做出相应的动作。
本文采用多传感器系统,检测轿厢的位置和运行状态。为了增加防碰撞系统的可靠性,在电梯系统上最好安装3个传感器系统。因为2个传感器系统发生误判而导致电梯紧急制停的概率较大。3个传感器系统会明显减少此类风险。
2.1 传感器系统1-条码定位系统
条码定位系统是由读码器和条码带等组成的。它的工作原理是将读码器安装在轿厢上,条码带全程安装在井道中,当轿厢运行时,安装在轿厢上的读码器时时扫描当前的条码,通过译码器输出轿厢当前的实时位置信息[6-7]。相对于常用的旋转编码器测量技术,条码定位系统可以达到绝对毫米级的测量精度,并且不依赖于参考点。
如图2所示,传感器系统1-条码定位系统:每个双轿厢井道有一条条码磁带,每个轿厢上有一条具有自检功能的条码读码器。两个条码定位系统的数据通过现场总线传输到碰撞预防装置,实时监测轿厢的相对位置。

图2 传感器系统1-条码定位系统
电梯轿厢的绝对位置可以通过条码磁带上的光编码来确定。根据行程高度,将部署两种不同版本的条形码传感器,即:当电梯运行高度小于196 m时,采用分辨率为14位的传感器;当电梯运行高度大于或等于196 m时,采用分辨率为16位的传感器。
2.2 传感器系统2-磁性绝对定位系统
磁性绝对定位系统包含一个安装在电梯井道的编码绝对位置的磁带和一个安装在每个电梯轿厢的磁铁传感器。测量数据通过CAN总线发送到安装在2个轿厢上的防碰撞装置。
磁铁传感器主要采用线性霍尔元件。霍尔传感器是以霍尔效应为物理机理设计制作的磁信号检测传感器。其结构牢固,体积很小,重量比较轻,安装方便,耐震动,不怕灰尘等的污染,精度高、线性度好、位置重复精度高[8-10];但是其受温度影响比较大,所以在测量时必须考虑温度因素。
2.3 传感器系统3-绝对脉冲发生器
如图3所示,两个电梯轿厢的限速器上都安装了绝对脉冲发生器。用实时的高速计数脉冲数值与每一楼层记录的数值进行比较,可以准确确定电梯实际的运行楼层位置,每个绝对脉冲发生器对轿厢位置和速度的测量值发送到防碰撞装置。

图3 传感器系统3-绝对脉冲发生器
3 多重安全保护系统设计
在防碰撞电子系统失灵或者系统出现误判时造成电梯异常停梯,是双子电梯需要解决的重要问题,也是双子电梯目前不能大规模投入使用的原因之一。为了避免出现因为系统失灵或者误判而造成的运行异常,需要增加独立于防碰撞电子系统的安全保护系统[11-12]。下面介绍可行的安全保护系统实施方案。
3.1 紧急制停保护
如图4所示,如果防碰撞电子系统不能确保预防紧急停止的最小距离,此时两个轿厢的主控制系统的安全电路均由防碰撞装置打开,越过主控系统直接触发安装在主机上的紧急停止和驱动机器的制停装置,使轿厢停止运行。

图4 主机制停装置
3.2 安全钳
如图5所示,如果在紧急情况下紧急制停装置没有足够的延迟,且不满足防碰撞安全钳的最小距离的情况下,将触发两个电梯轿厢的安全钳,此时防碰撞安全钳动作,进而限制轿厢的运行速度。

图5 防碰撞安全钳
4 系统测试分析
在电梯井道中,对防碰撞系统做了测试,主要测试了双轿厢最小安全距离的可靠性,验证设计的有效性。由于条件受限,不能模拟电梯高速运行时(运行速度4 m/s以上)的情况,结合当前大多数厂家电梯的运行速度,选取常见标准电梯运行速度进行测试。考虑到目前双轿厢电梯基本上都是超高速电梯,运行速度在5 m/s以上,轿厢制停惯性较大,最小安全距离较大[12]。在现有条件下,在测试速度下最小安全距离设定比较保守,以期能达到测试的有效性。测试的主要依据是在设定的最小安全距离下,双轿厢相向运行系统停止时2个轿厢之间的距离。测试数据,如表1所示。

表1 不同速度下双轿厢防碰撞系统最小安全距离测量
从测试数据中,可发现,当电梯低速运行时(运行速度小于或等于1.75 m/s),电梯制停时双轿厢的实际距离与设定的最小安全距离比较接近,相对误差较小。当中高速运行时(运行速度大于或等于2.0 m/s),双轿厢实际距离与设定的最小安全距离相对误差有所增加,但是总体趋势变化不大。总体来看,系统制停距离与设定的距离误差依然处于设计允许的范围内,说明本系统的设计是有效的。
5 结束语
随着超高层建筑的日益增多,为了有效提高超高层建筑物内工作生活的乘客运输能力,需要新型的电梯运输方式,蒂森克虏伯的使用已经证明双子电梯就是一种理想选择之一。但是如何保证2个独立运行的轿厢不发生碰撞,是双轿厢电梯需要解决的关键问题,也是双子电梯普及推广需突破的瓶颈之一。本文提出的一种防碰撞电子系统,可以有效确保2个轿厢在保证最小安全距离下安全运行;在有限的条件下测试表明,本系统是有效可行的。
