基于低相干光干涉的眼睛光学生物参数测量研究*
2022-09-22胡积烨黄丽媛丁文正黄铭斌曾亚光谭海曙
胡积烨 陈 隆 黄丽媛 丁文正 黄铭斌 张 浩 曾亚光 谭海曙**
(1)佛山科学技术学院物理与光电工程学院,佛山 528200;2)佛山科学技术学院机电工程与自动化学院,佛山 528200)
眼睛的光学生物参数有眼轴长度(AL)、角膜曲率半径(CR)、前房深度和晶体厚度等。这些光学生物参数能够为人眼的屈光不正和眼睛的很多疾病提供科学的判断依据,因此眼睛的光学生物参数精确测量显得尤为重要。目前,人眼屈光不正已成为影响中国国民尤其是青少年眼健康的重大公共卫生问题[1-2],北京大学中国健康发展研究中心发布的《国民视觉健康》白皮书[3]提到,近视已成为“国病”,每三个人中就有一个人是近视患者,近视患者的度数增加也会带来眼睛的很多疾病[4-7],如白内障、视网膜脱落、黄斑变性和青光眼等。眼睛近视的预防和监测可以由眼睛光学生物参数中的AL和CR来达到[8-16],因此AL和CR的准确测量显得尤为重要。
传统的AL测量方法主要是采用超声测量,该方法采用超声波对眼睛进行扫描,通过接收眼球不同层结构的超声回波信号进而得到眼球的深度信息[17-18]。但是在超声测量过程中探头需要和角膜接触,同时还需要对眼部进行麻醉,会增加角膜损伤和感染的风险;并且测量过程中容易受到操作者的主观因素影响,产生较大的测量误差,测量精度只有100~200 μm。随后美国麻省理工学院Huang等[19]提出利用时域光学相干层析技术测量生物组织的方法(TD-OCT),该方法采用宽带光源,根据眼睛角膜和视网膜的散射光与光学延迟线光产生干涉来测量AL,其因为具有非接触、精度高和抗外界干扰等优点而被广泛使用。光学延迟线的产生是通过步进电机带动反射镜前后移动来产生的,该方法存在步进电机移动速度慢问题,会因为眼睛的抖动产生较大的误差,无法进行实时的精确测量[20-21]。现国内最新的AL测量研究成果如下:任天慧等[22]采用扫频源OCT,设计并集成了视频监视组件和内固视组件,保证扫描光线与眼轴平行,实现对AL、中央角膜厚度、前房深度和晶状体厚度等眼组织参数的精确测量;李恺宁等[23]提出了一种动态焦点同步技术,进一步提高眼组织内部的检测信号强度;天津索维公司的SW 9000采用低相干反射技术测量眼睛的AL,其采用多个直角棱镜作为光学延迟线,该仪器在眼轴、角膜曲率及角膜散光轴位(角膜散光>1D)测量方面与IOL Master测量结果有高度的一致性和相关性[24]。角膜在人眼屈光系统中也占有极其重要的作用,占到人眼屈光力的80%以上[25]。白内障在中国的发病率高于5%,它会导致视力下降,严重影响患者的生活质量。目前治疗白内障主要是通过移植人工晶状体以及准分子激光来达到屈光治疗,这些方法对角膜曲率的测量精度有较高的要求,而角膜曲率测量的精度主要取决于角膜顶点到靶环之间距离的测量精度和恒定的成像系统的放大倍率,现有的方法主要依靠CCD成像系统的清晰度来保证角膜顶点到靶环之间的距离精度,其精度和稳定性都不够,恒定的成像系统放大倍率由光路上采用远心镜头来保证,使得光学系统结构复杂、成本昂贵[26-30]。而后如李华建等[31]采用双远心镜头,提高成像系统的景深,利用光栅尺监测扫描反射镜的位置确定角膜顶点到测量光源距离,但该方法也使得光学系统结构复杂、测量速度慢、不易装调和成本昂贵。
本文研制出一种基于光学低相干光干涉技术的眼睛光学生物参数测量系统。该系统采用超辐射发光二极管(super luminescent diode,SLD)低相干光源,四方块作为光学延迟装置,通过伺服电机旋转的方式快速改变参考光的光程,实现了对眼睛快速的轴向扫描,减少了人眼抖动产生的误差;采用聚焦透镜将样品臂平行光汇聚到视网膜处,提高角膜和视网膜的检测信号强度;用8 mm的标准件校准干涉初始位置到LED靶环之间的距离,利用角膜顶点的干涉信号计算角膜顶点到LED靶环之间的距离,实现角膜曲率动态、实时和精确的测量;利用角膜信号触发相机和采集卡,实现相机拍照和数据采集卡的同步采集,保证成像系统的放大倍率和眼轴数据的实时采集。
1 测量原理
1.1 低相干光干涉原理
时域光学低相干干涉仪基于迈克尔逊干涉原理(Michelson interferometer)[32],其工作过程为:光源发出的光经过一个45°斜置的分束镜后被分为两束光,分别进入样品臂和参考臂,经反射后沿原路返回,最终在分束镜处相遇产生干涉并被探测器接收。
采用宽带光源时,探测器上接受到的干涉信号是带宽内所有波长干涉的叠加,当参考臂与样品臂的光程差为零时,探测器接收到的能量最大。
1.2 AL测量原理
AL测量的原理是利用光源的低相干特性实现的。样品臂的光入射到眼睛,经过角膜和视网膜反射原路返回。参考臂利用旋转式的光学延迟线[33],光经过光学延迟线后原路返回到光纤中,与样品臂的光发生干涉。采用宽带光源时,参考臂和样品臂的光程差为零,则探测器接收到的干涉能量最大,通过探测器接收到的能量来精准定位角膜和视网膜的位置,从而实现AL的测量。
1.2.1 光程扫描原理
旋转式的光学延迟线光路图如图1所示。首先入射光线由A点进入光学延迟线,在A点处发生折射到B点,在B、C两点处发生反射,最后在D点折射出去。
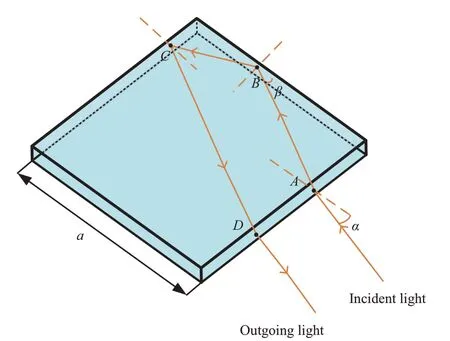
Fig.1 Principle of optical path scanning
光学延迟线在旋转的过程中,光学延迟线扫描的光程与旋转角度α之间的关系为:

式中,S为光在延迟线中的光程,a为光学延迟线的边长,α为光线的入射角,n为光学延迟线的折射率,β为折射角。
根据式(1)可知,光学延迟线扫描范围由边长和折射率决定。人眼的AL大概为16~30 mm[11],折算到空气中为21~40 mm,延迟线的扫描光程需要超过人眼的最大AL。本文模拟了边长为45 mm和55 mm以及材料折射率为1.5的K9玻璃材料和折射率为2.3的ZnS材料的光学延迟线扫描光程情况(图2)。由于在光学系统搭建过程中存在一定误差,两端的角度会影响边缘光线的扫描,因此旋转角度的选取范围为20°到80°。由模拟结果(图2a,b)可知,随着延迟线边长的增加,扫描光程的变化范围也随着增加;由对比(图2a,c)可知,随着延迟线折射率的增加,扫描光程的变化范围也随着增加。此外,折射率越高,光学延迟线的线性度越好(图2),本文采用线性度来量化光学延迟线的线性情况,通过计算得出的非线性误差分别为1.92%(图2a)、1.92%(图2b)和0.19%(图2c)。因此,增大折射率能有效提高光学延迟线的线性度,能有效提高眼轴长度的测量精度。
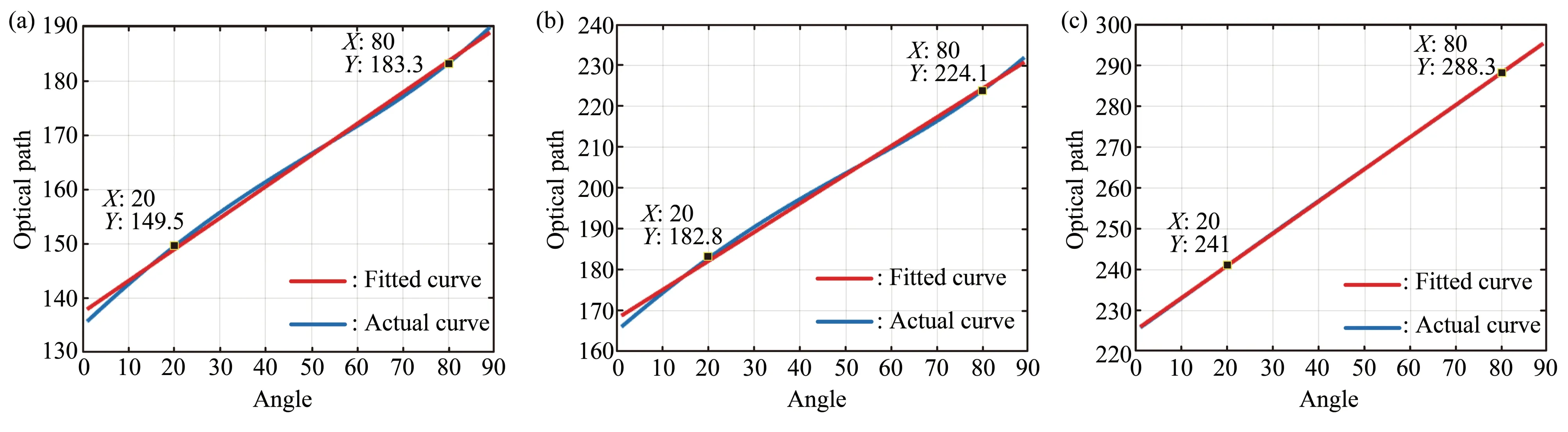
Fig.2 The relationship between the optical path length of the delay line and the side length and refractive index
1.2.2 干涉信号的频率原理
样品臂与参考臂的干涉信号频率决定了信号的采集和信噪比。干涉信号的频率为:

式中,f为干涉信号的频率,v为光在延迟线的速度,λ为入射光的波长。光在延迟线的速度为:

将(3)式代入(2)式得到最终的干涉频率为:

式中,n为光学延迟线的转速。
由式(4)可知,干涉信号的频率受延迟线的转速、边长和延迟线的折射率影响。本文模拟了转速为1.5 r/s和2.5 r/s、边长为45 mm和55 mm和折射率为1.5和2.3对干涉信号频率的影响(图3)。
如表1可知:a.转速越大,信号的中心频率和带宽越大,中心频率越大对数据采集卡的采样率要求越大,信号的带宽变大不利于后面信号的滤波处理,转速减小不能达到对眼睛的实时扫描(对比(a)(b));b.边长越大,信号的中心频率和带宽越大,不利于信号提取,减小边长系统的扫描范围不够(对比(b)(f));c.折射率越大,信号的中心频率越大,但带宽会越小,越利于信号提取(对比(b)(c));d.边长越大,信号的中心频率越大,带宽越大,不利于信号提取(对比(c)(d));e.转速越小,信号的中心频率越小,带宽越小,越利于信号提取,但对人眼扫描速度慢,增加人眼抖动带来的误差(对比(c)(e))。
综合上述分析,本文选取了边长为45 mm,折射率为2.3的ZnS材料,设置转速为2.5 r/s,得到的扫描光程范围为47 mm,信号的中心频率为1.675 MHz,带宽为0.05 MHz。
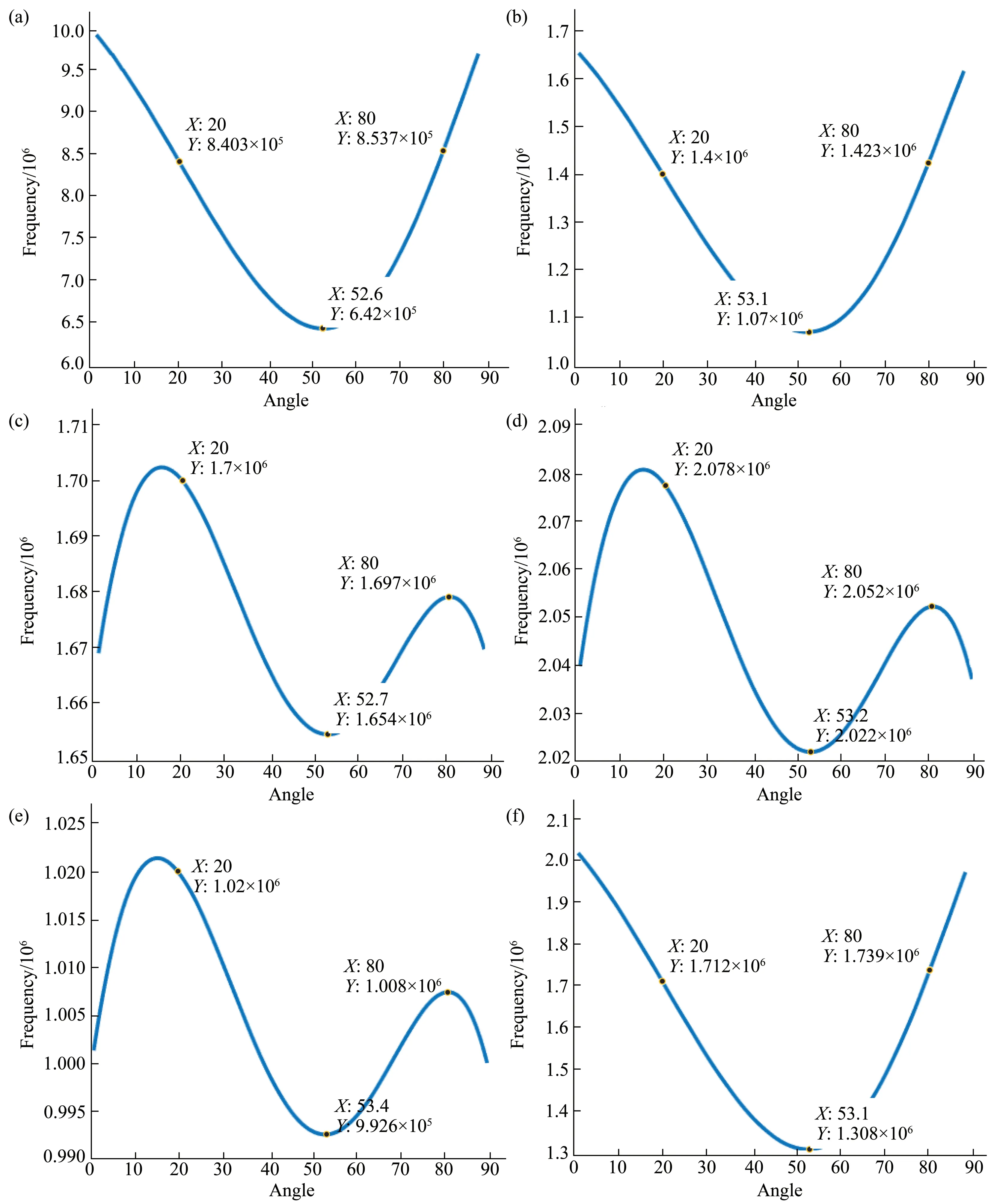
Fig.3 The relationship between the interference frequency of the delay line and the speed,side length and refractive index
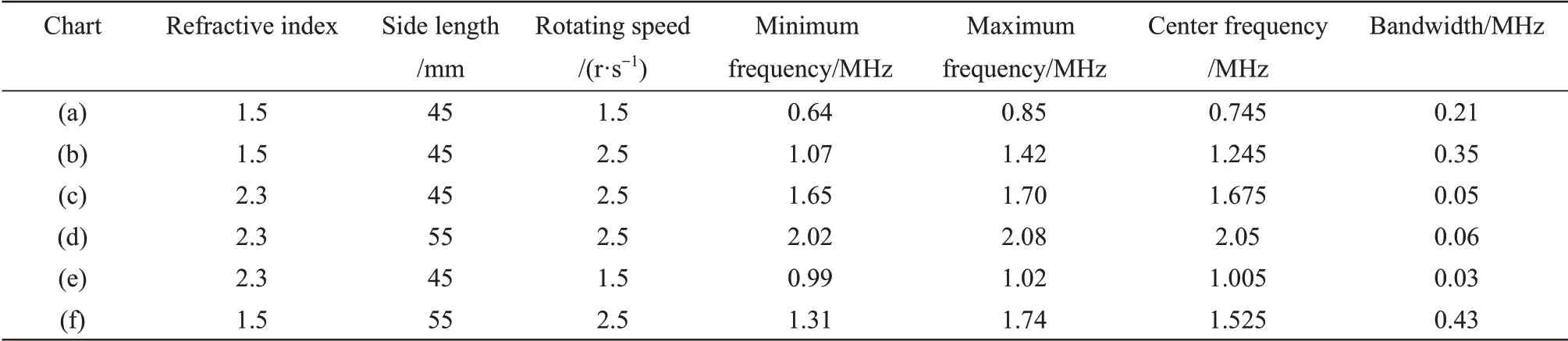
Table 1 The influence of the refractive index,side length and speed of the delay line on the interference frequency
1.3 角膜曲率测量原理
角膜曲率测量光学原理如图4所示,两圈环形LED靶环阵列光源照射到人眼角膜表面,由于角膜表面近似于一个球面镜[34-35],入射光会在眼球内部呈正立缩小的虚像,该虚像作为成像系统的物,通过光学系统在CCD上成倒立的实像。

Fig.4 Principle of corneal curvature measurement
根据CCD上实像的尺寸y0和系统的放大倍率β(图4b),可以得到靶环虚像的尺寸y',根据虚像的尺寸计算出人眼的角膜曲率半径R,由几何关系推导可得:
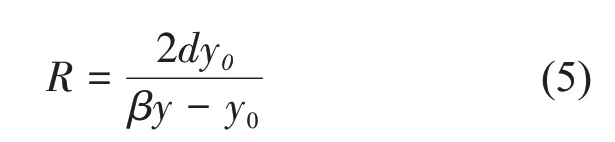
式中,d是靶环到角膜顶点的距离,y是环形LED阵列的实际尺寸,y0是相机上像的尺寸,β是成像系统的放大倍率。
假设眼角膜仅有球面镜的情况,此时LED阵列在相机成像是圆环阵列,若眼角膜有散光,则是椭圆环阵列,此时计算椭圆环的长短轴长度以及与水平方向形成的夹角,获得人眼的轴位角[36-37]的信息。
2 实验系统设计
本文研究的眼睛光学生物参数测量系统装置(图5)主要包含光源模块、参考臂模块、样品臂模块、采集模块和成像模块。光源模块主要有宽带光源和3×3光纤耦合器(分光比为33∶33∶33),利用Exalos公司的SLD作为宽带光源,光源的中心波长为840 nm,带宽为40 nm(EXAOLOS公司生产,其型号为EXS210106-01);参考臂主要由光纤准直器、伺服电机(转速为150 r/min)、光学延迟线、柱面镜、反射镜构成;样品臂主要有准直器、色散补偿光纤、半反半透镜和聚焦透镜,色散补偿光纤用于参考臂光学延迟线的色散补偿;采集模块主要有光电平衡探测器、高速采集卡和电脑;成像系统主要由CCD相机(130万像素,分辨率1 280×960)和聚焦透镜组成(景深7.41 mm,分辨率0.019,放大倍率0.3)。宽带光源发出一束光,该光束经过的光纤耦合器分为两束光,样品臂的光经过准直器后聚焦到待测样品,样品的背向反射光原路返回到光纤中;参考臂上将光学延迟线固定在一个圆盘上,通过伺服电机带动圆盘从而带动光学延迟线转动,光进入延迟线后在其内部经过折射出来被反射镜原路返回到光纤中。两臂的回光在耦合器里面产生干涉后被光电平衡探测器接收转化为电信号,同时利用角膜的干涉信号触发数据采集卡进行采集,保证采集卡能够实时采集到眼轴的数据。把采集到的数据传输到电脑上,经过处理后把干涉信号实时显示出来,并通过计算角膜和视网膜的干涉峰之间的距离算出AL。
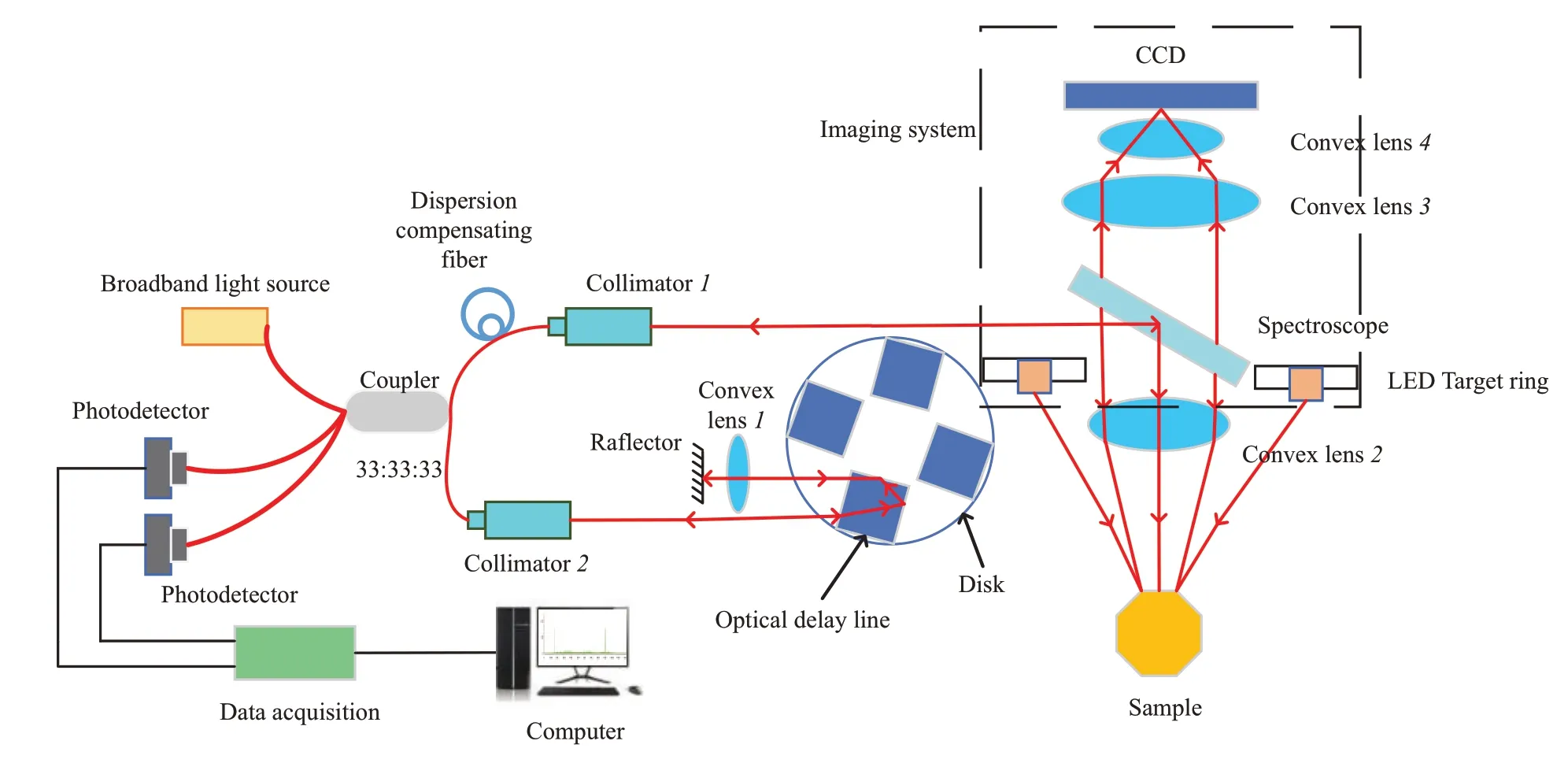
Fig.5 Device diagram of eye optical parameter measurement system
为实时的精准测量角膜顶点到靶环之间的距离,本文采用了半径8 mm的标准件进行标定,角膜定位如图6所示,两个半径为16.75 mm和19.25 mm环形LED靶环阵列光源发出波长为770~780 nm的红光照射标准件,通过已知的R、y、β、y0,用公式(5)计算出标准件的干涉位置到靶环之间的距离d,再用反射镜找到系统的干涉初始位置A1并计算标准件干涉信号距离系统干涉初始位置之间的距离d2,后计算d2和d之间的距离差即可计算出靶环到系统干涉初始位置之间的距离d1。当实际测量人眼时,可以实时的根据角膜的干涉位置d与前文得出的干涉初始位置d1,算出角膜顶点到靶环之间的距离,实现对角膜顶点到靶环之间距离的实时测量。
为保证成像系统的放大倍率,首先使用间隔为0.5 mm标定板进行标定,标定的流程为:将标定板置于靶环前,步进电机前后移动靶环,按图像的能量梯度来计算出其最清晰的位置,计算出CCD上像的大小与标定板的实际长度来精确计算成像系统放大倍数β;在精准测量成像系统的放大倍率后,利用角膜的干涉信号触发相机采集图像,采集到的图像就是标定处的成像放大倍率,保证了每次测量时成像系统的放大倍率稳定不变。最后通过对采集到的图像进行处理求出y0,利用公式(5)便可实时、精确地计算出人眼的角膜曲率。

Fig.6 Schematic diagram of corneal curvature positioning
3 结果与分析
3.1 AL的重复性和精度测试
在测试AL的重复性和精度之前,本文验证了系统干涉信号的信噪比和纵向分辨率,实际的测量信号图见图7a。为了得到高信噪比,首先对原始信号进行带通滤波处理,滤除直流信号和电源噪声,其次对信号进行希尔伯特变换提取信号的包络,最后对信号进行低通滤波滤除信号的毛刺,得到了信号强度为140、噪声信号为15、信噪比高达19 dB的信号(图7b);系统的纵向分辨率受到参考臂光学延迟线产生的色散影响,因此在样品臂加入色散补偿光纤进行色散补偿,对比没有进行色散补偿的信号(图7c)和加入色散补偿光纤进行色散补偿的信号(图7d)可知,没有进行色散补偿的干涉信号展宽很大,存在多个波峰,不能准确定位干涉峰的位置,影响测量精度。计算信号的半高宽得到系统的纵向分辨率为8.3 μm,符合测量精度。
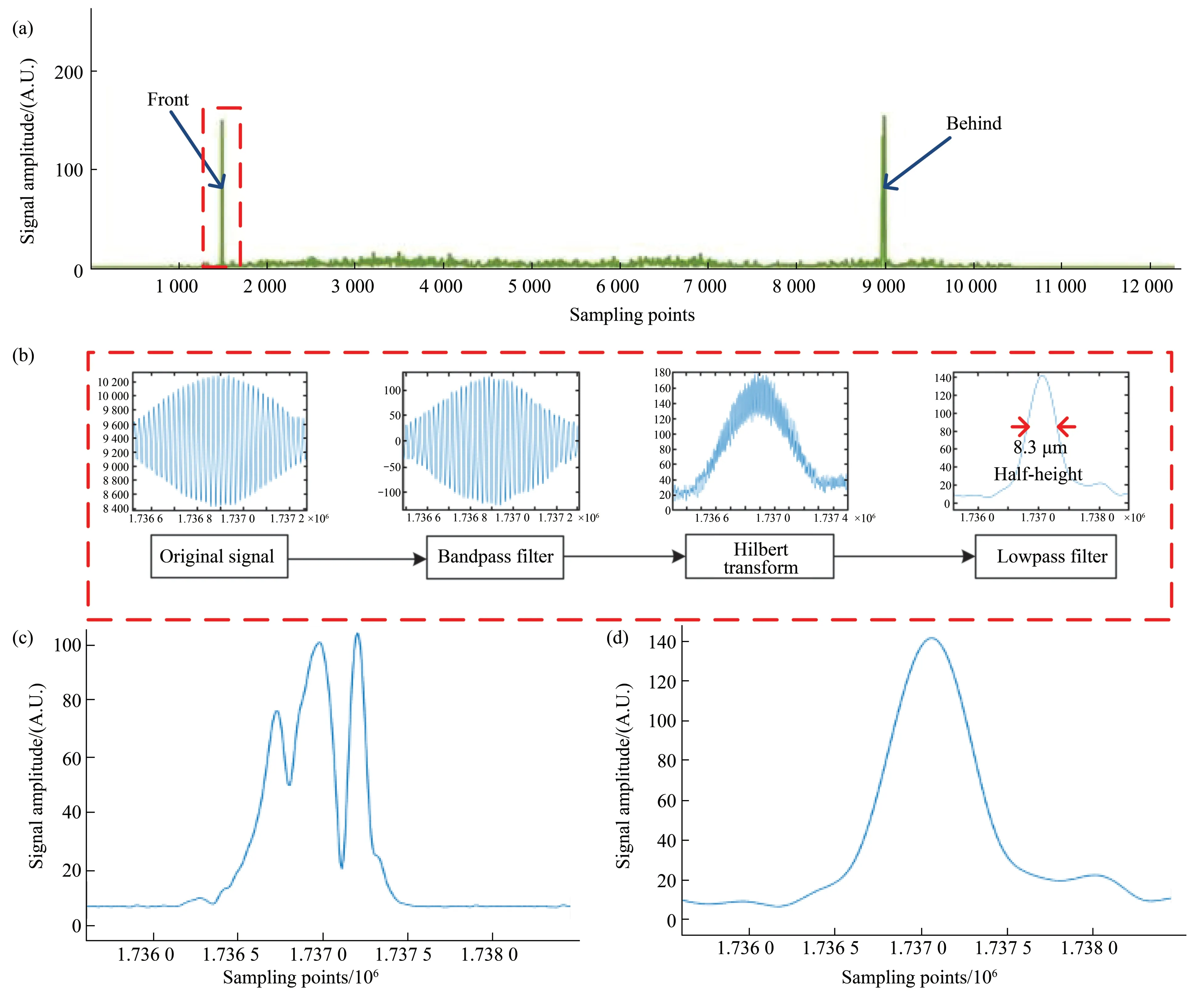
Fig.7 30 mm eye axis length signal diagram
为验证本系统测试眼轴长度的重复性和精度,本文采用国家计量院发布的标准眼轴长度为15、20、30 mm的模拟眼(型号分别为K9-ST-15、K9-ST-20、K9-ST-30,折射率为1.525 5,实际测量值分别为15.000、19.998、30.008 mm,不确定度为10 μm)进行测量450次(图8),数据的标准差分别为0.007 9、0.008 4、0.007 7,说明系统的重复性良好,平均值为14.991、20.014、30.012,最大误差为40 μm,远低于国家误差标准的100 μm,结果表明本文研究的系统对AL的测量能够达到高精度的测量要求。
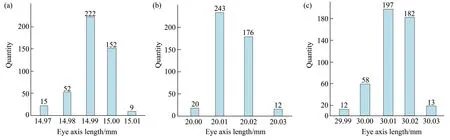
Fig.8 Standard analog eye axis measurement length
为验证本系统的眼轴长度测量准确性,将本系统的测量值与蔡司公司的IOL Master(德国ZEISS IOL Master500,光学低相干反射原理,测量精度0.01 mm)眼科生物参数测量仪和瑞士Haag-Streit生产的LS900(光学低相干反射原理,测量精度0.01 mm)光学生物测量仪测量值进行对比。采用IOL Master500和LS900对5名志愿者进行AL测量(表2),结果显示,志愿者5的AL测量误差最大,达到了50 μm,其余的都在40 μm以内,由于人眼状态的调节也会带来一定的误差,所以数据测量的误差也会偏大。采用LS900对4名志愿者进行AL测量(表3),对数据分析可知,4个志愿者数据偏差都在40 μm以内,能够达到本系统的精度。
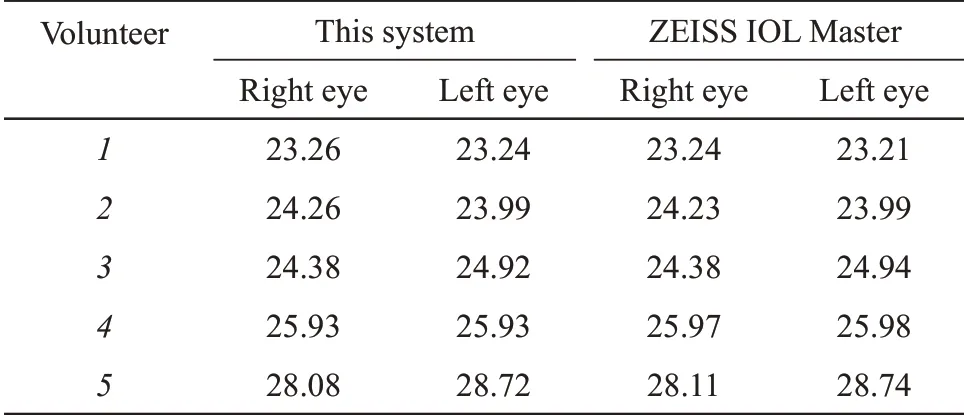
Table 2 Comparison of the axial length measurement results of our system and the Zeiss IOL Master
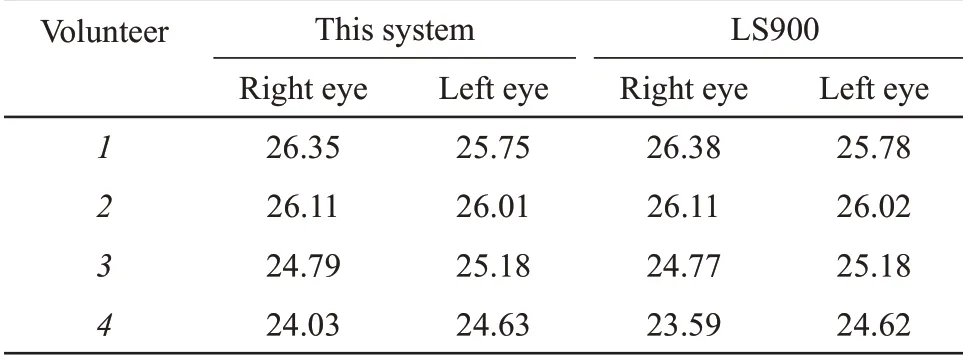
Table 3 Comparison of the axial length measurement results of our system and the LS900
3.2 角膜曲率的重复性和精度测试
人眼角膜CR大概在8 mm左右,因此采用半径为8.005 mm的标准件测量系统的重复性和精度。本文分别对人眼和8.005 mm标准件进行角膜CR测量20次(图9,表4、5)。对数据分析可知,标准件的数据方差为1.676 29×10-3μm,重复性精度远高于国家标准计量单位20 μm的误差,测量实际平均值为8.002 6 mm,较标准值减小了2.4 μm,测量精度满足要求;人眼的数据方差为2.082 36×10-2μm,由于人眼在数据采集过程中存在抖动问题,数据波动会比标准件偏大,但总体的重复性良好。
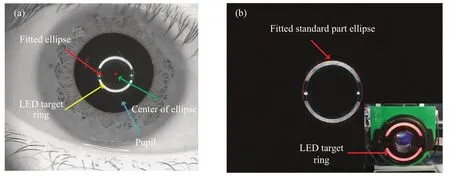
Fig.9 Fitting of LED target ring

Table 4 The radius of curvature of 20 groups of standard parts with a radius of 8.005 mm
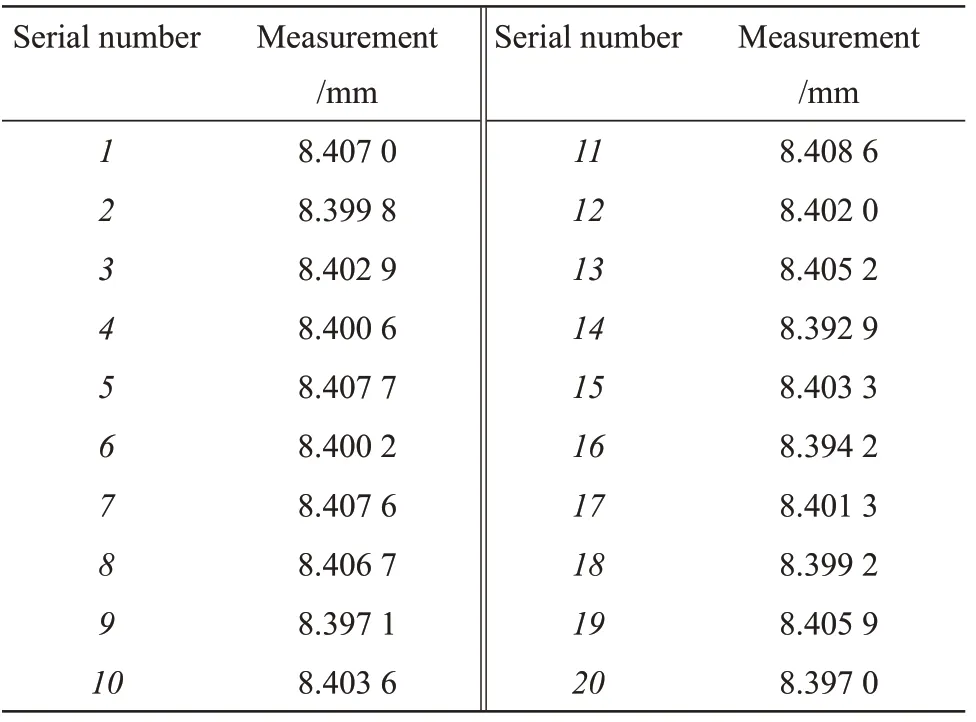
Table 5 The corneal curvature radius of 20 groups of human eyes
4 结 论
本文提出了一种基于低相干光干涉眼睛光学生物参数测量系统,采用旋转式的光学延迟线快速对眼睛进行轴向扫描,扫描时间小于25 ms,实现对眼睛的实时精确测量;通过角膜反射回来的光信号实时定位角膜位置,利用8 mm的标准件标定系统的角膜顶点到靶环之间的距离,实时地定位角膜顶点到靶环的距离,从而实现角膜CR的动态测量;利用角膜的干涉信号对相机和数据采集卡进行同步触发,实现了眼轴数据和角膜曲率数据的同步采集,保证了眼轴数据的实时采集和成像系统的放大倍率不变。实验数据表明,本文提出的系统实现了AL最大测量误差40 μm、人眼角膜CR方差为2.082 36×10-2μm,相比传统的方法,此方法具有速度快、精度高的优点,能够为眼睛光学生物参数AL和角膜曲率的精准测量提供一种新的研究思路和技术手段,可在近视的预防和监测中发挥重要的作用。
