步行移动机器人专利概况分析
2022-09-20杨慧慧
杨慧慧
(国家知识产权局专利局专利审查协作北京中心,北京 100160)
机器人技术是近几十年发展起来的综合学科,它集中了机械工程、电子工程、计算机工程、自动控制工程及人工智能等多种学科的科研成果。轮式、履带式及腿式是人类设计用于移动式机械装备主要的基本形式,在实际应用中,为适应星球探测、军事及救灾等极为复杂的地面环境,腿式及蛇形等移动机构的研究一直为学术界和大众所关注[1]。
1 全球步行移动机器人专利研究现状
步行移动机器人在机动性能上的独特优势使得其在军事、航空航天中应用愈来愈广,这也将使其成为未来无人环境中的主体和先导,据调查地球上近一半的地面不能为传统的轮式、履带式车辆到达,而很多足式的动物却可以在这些地面上自如行走[2]。步行移动机器人的研究一直是众多学者关注的热点和难点,步行移动机器人的基础理论研究步伐要远滞后于其技术开发步伐,现有的步行移动机器人的足数为偶数的占大多数,因为就直线运动来说,偶数足能产生有效的步态[3],国内步行机器人的发展最早可追溯到中国古代,此后步行移动机器人历经了长久的发展。
图1为根据每年全球步行移动机器人领域的专利申请量,绘制出的步行移动机器人在全球各年度专利申请的趋势图,在步行移动机器人领域的全球专利申请大体经历了以下几个发展阶段。
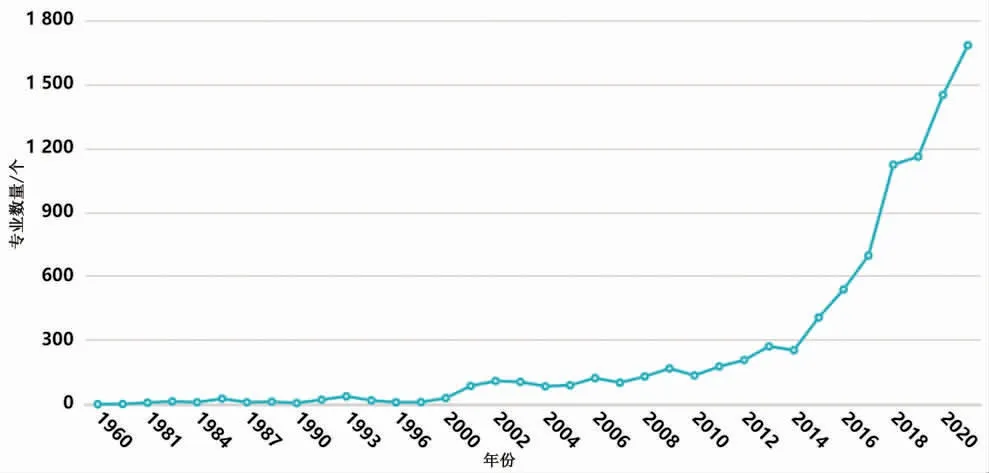
图1 全球步行移动机器人相关专利的全球申请趋势
1.1 初步发展阶段(2000年之前)
从图中可以看出早在20世纪60年代初,世界各国陆续开展了步行机器人技术的研究,美国的2位学家就使用凸轮连杆机构设计出比传统车辆更为灵活的步行移动机构,但在很长一段时间内步行移动机器人技术的相关专利较少,始终处于个位数,之后申请量稍有增长,但也没有很快速地增加,这是由于在步行机器人发展的初期,还是以简单的机械、液压控制及简单的步态,模仿简单的足式动物行走为主,还不能应用到复杂的领域环境中。
1.2 第一快速发展阶段(2000—2014年)
随着科学技术的发展,各界对步行移动机器人的研究开始深入,此阶段发展位以计算机控制为主,以美国、日本等国的发展最为突出。比如日本工程师Takahashi Hitoshi、日本教授Hirose Shigeo此期间申请了多项发明专利,如:JPH03111182A、JPH07117743A、JPS62277282A、JPS60245869A,可作为移动的平台在崎岖和陡峭的地方步行,能够实现避障的功能,同时步行腿也能作为操纵器使用,能够自主超过一定角度的斜坡。机器人的腿部机构均是采用四杆机构的缩放步行机构,采用开环连杆机构作为其步行机构,其腿可作为有力的工作臂,可用于探测地雷和进行排雷操作,适用于军事方面。美国的Boston Dynamic Inc.从2004至今申请了多件专利,以著名的“Bigdog”闻名,这是一种动力平衡四足机器人,它没有车轮或者履带,采用4条机械腿来运动,机械腿上面有各种传感器,包括关节位置和接触地面的部位,其运动是由装载在机身上的计算机控制,计算机能够接收机器上各种传感器传达的信号,导航和平衡也由这个控制系统控制。
1.3 第二快速发展阶段(2015—2021年)
随着科学技术的继续发展,此阶段发展位以人工智能控制技术为主,步行移动机器人的专利申请量迅速增加,此阶段的机器人不但具备完成各种任务的功能,还有自适应的运动规划和控制性能,日本、美国等各国发明出多种仿生步行机器人,将仿生动物应用于机器人的运动学设计来提高机动性和可操作性,如日本申请人Univ Osaka申请的WO2006129857A1,形体像蜘蛛,将3个集成肢体的肢体尖端部分钩到安装在天花板上的格子上,以使机器人沿着天花板行走。美国申请的US4527650A,可以在非常狭窄的区域中行走和操纵,在不旋转身体的情况下改变其运动方向,协调各个腿部的运动,感觉到周围的环境,以便每只脚都能正确落地,保持平衡,以免摔倒,韩国申请人Univ Sungkyunkwan申请的KR20070070825A,模仿活生物体的仿生动物应用于机器人的运动学设计来提高机动性和可操作性,通过分析四足动物在步行过程中前肢和后肢的特殊功能和步态,可以将其用作提高能量效率和步态的重要设计因素。
2 在中国申请的步行移动机器人专利申请概况
2.1 中国的申请人申请趋势
图2为根据每年中国步行移动机器人的专利申请量,绘制出的步行移动机器人在中国各年度专利申请的趋势图。在国内对多足步行机器人的研究是在20世纪80年代末90年代初起步的,初期申请量很少,2000—2020年,步行机器人技术也有了较大的发展,申请量迅速增加。
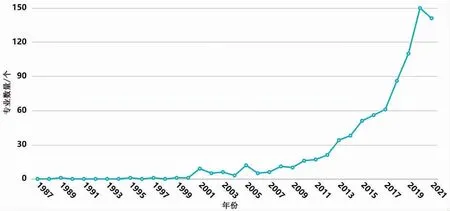
图2 步行移动机器人相关专利的中国申请趋势
2.2 中国申请人的类型分布
图3为中国国内专利申请人类型的分布,通过该分析可以明晰创新主体的类型,并通过创新实体的主体性质、研发实力和研发目的分析创新成果更偏向基础研究还是商业应用,定位技术在产业链中的位置和可能的运营模式,为进一步找出在产业内影响力大的不同类型的创新主体提供依据。观察图3可知,步行移动机器人领域专利申请人的主体是大专院校,大专院校申请人的申请量占比为48.77%,高于其他类型的申请人的申请量,其次是企业申请人,企业申请人的申请量占比为36.61%,这不仅与步行移动机器人领域技术含量较高、结构复杂等因素有关,还与该领域的技术成果多用于军事、航空等探索研究及投放市场的研发目的有很大关系。

图3 步行移动机器人中国专利申请人类型
2.3 中国主要申请人排名
图4中为申请步行移动机器人中国专利大专院校的排名前十的主要申请人,国内211、985大专院校是中国申请人进行步行移动机器人研发和申请的绝对主力,浙江大学、清华大学、北京航空航天大学、上海交通大学和北京交通大学等院校都先后开展了多足步行移动机器人技术的研究。
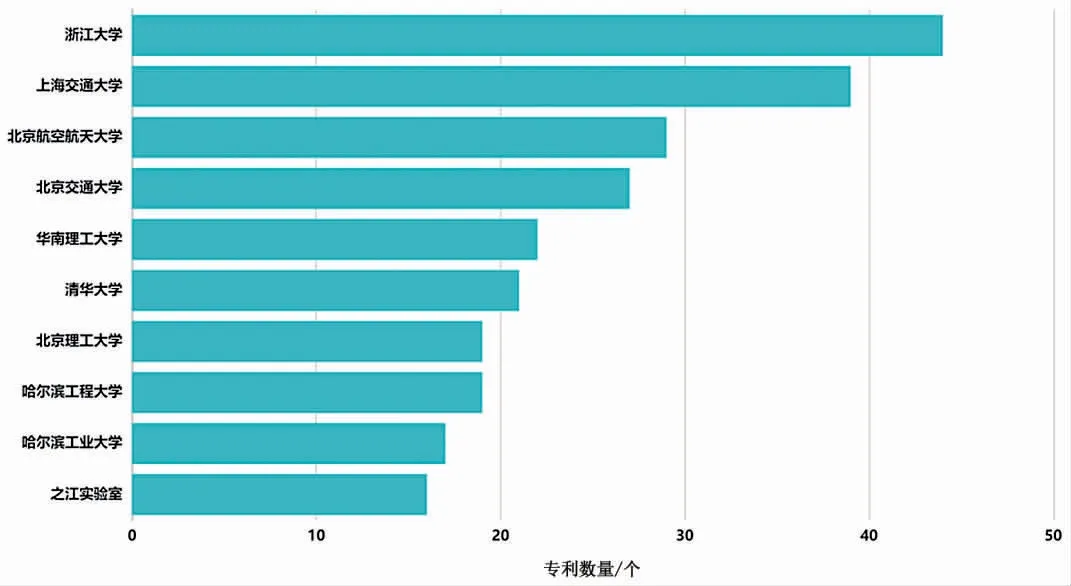
图4 在中国申请步行移动机器人的主要申请人
其中比较有代表性的有上海交通大学申请的2种四足仿生机器人,腿部采用四杆缩放机构,清华大学、上海交通大学也相继申请了多件有关四足仿生机器人的专利,具有爬坡、越障等环境适应性功能,可以在地形复杂、环境恶劣的作业条件下行走,如:清华大学申请的CN1483554A(一种可调整的四足仿生机器人运动结构),通过调整多项结构参数与运动参数,使机器人呈现多种仿生形体结构,该机器人可用来实现以多种典型步态如自由行走、对角行走、侧步和奔跑等进行平地行走,能够适用于模仿较广泛的动物节律运动控制,可用来进行野外勘探、探险等一些恶劣条件下的作业;上海交通大学申请的CN104925160A(直线驱动的步行机器人腿部构型及并联六足步行机器人),具有腿部质量轻、转动惯量小、便于防护和驱动器规格统一的优点,可以在地形复杂、环境恶劣的作业条件下行走。
但是,目前研究和应用的步行移动机构的腿部一般采用连杆机构,从整体上看都属于开链机构,且腿部自由度多,结构复杂需要较多的动力机驱动与控制,腿式协调控制复杂。北京交通大学姚燕安教授在2008年至今申请20多项发明专利,发明了多种将空间闭链机构应用到步行机构中的设计,这些机构在航天、军事等领域的侦查和采样等方面均可以得到应用,如:CN108860353A(一种全转动副四面体移动机器人),其6个支链的结构和尺寸相同形成闭环,外形呈现正四面体,通过控制舵机的正、反转驱动支链内翻、外翻达到四面体移动机器人的变形及移动目的;CN101915292A(一种单动力滚动球面四杆机构),通过控制电机正反转,使得球面四杆机构变形,利用惯性力使机构翻转,实现机构沿着圆周滚动;CN102058982A(一种单动力滚动多边形机构),该机构具有单自由度用1个电机进行驱动和控制,同时具有“雪花”的外形特征,通过变形改变机构的重心位置,实现滚动运动。CN102211623A(一种空间四杆步行机构),通过控制2个电机的转动,使空间四杆步行机构实现直行及转弯功能,实现平面任意方向步行运动;CN102874340A(一种具有操作功能的移动机构),通过控制驱动电机,实现该机构步行和爬行步态,可以达到调节自身平衡与越障的功能。
3 结束语
随着科学技术的发展,人类的研究和活动领域已在不断地扩展,利用步行移动机器人进行探测和开发己经成为21世纪世界各主要科技发达国家的主要方式之一,从专利申请来看,中国也正在加大对步行移动机器人领域的研究。在未知的环境、不可以预测的环境中步行移动机器人的研究将是机器人学的一个重要研究领域。
