基于无人机激光雷达三维绿量快速测量研究及应用
2022-09-20李明胜
李明胜
LI Mingsheng
(上海长兴岛开发建设有限公司,上海 201903)
( Shanghai Changxing Island Development and Construction Co., Ltd, Shanghai, China, 201903 )
三维绿量是表征城市植被生态效益的综合指标。以上海浦江郊野公园香樟林地为对象,通过无人机激光雷达与传统样地调查分别对研究区香樟三维绿量进行测算对比分析。结果发现:(1)相对于传统样地调查,无人机激光雷达手段可大幅提高测量植被三维绿量的精度与效率;(2)上海浦江郊野公园香樟样地的总三维绿量为2 936.55 m3,平均三维绿量密度为2.17 m3/m2,单木三维绿量与冠幅的线性相关性更为显著。结果旨在为城市植被三维绿量快速测量提供方法参考。
无人机激光雷达;三维绿量;香樟;快速测量
随着城市化水平的不断提高,城市热岛及其衍生的一系列生态影响开始显现,城市植被作为城市热岛降温效应的蓝绿基础设施受到了广泛关注[1-4]。过去对城市植被的研究大都基于二维尺度来开展,对其三维空间结构方面的探讨不多[5-8]。而从二维到三维评价角度的转变,是更加全面评估城市植被生态功能的必然要求[9]。三维绿量正是这样一种表征城市植被生态效益的三维指标,其最早于1995年由上海市绿化三维量遥感调查项目提出[10],代表城市内所有生长植物的茎叶所占据的空间体积可为城市绿地规划设计提供科学依据。
城市三维绿量的主要研究方法有方程模拟、平面模拟、立体量推算等[11-13]。其中方程模拟法不仅耗时耗力,且其精度十分依赖调查数据的准确性;平面模拟则需根据不同情景建立冠幅—冠高回归方程,再根据冠形计算三维绿量,相对误差也较大;立体量推算主要采用分层抽样进行三维绿量测定。于东海等[14]使用无人机倾斜航空摄影的手段,建立了单株树木的点云模型,发现该点云模型的精度可满足林业调查中对树高及树冠体积的计算要求。Francesco Nexl等[15]利用便携式三维激光扫描仪ZF成像仪对实验树木的生物量增长情况进行了持续的监测,这被认为是一种无损的监测方法。西班牙学者Fernández-Sar rí a[16]则利用地面激光扫描系统(TLS)估计了橄榄树的生物量,总结了生物量与树冠体积参数之间的紧密关系。新兴的无人机技术降低了采集成本,提高了数据时效性,激光雷达则可获得形态各异不同树种的三维点云信息[17],使其可测得更准确的树冠特征数据[18],国内并未见使用无人机激光雷达测量三维绿量的相关报导,相较于传统的调查手段,无人机与激光雷达的结合,使得在测量植被三维绿量时可以很好地兼顾效率和精度,且成本低,是一种新兴值得探究的技术手段。
上海是全球最早进行城市森林规划和建设的城市之一,城市植被结构与功能的完善是城市森林建设过程中的重点,而如何准确高效地进行三维绿量监测和评估,是城市森林管理中必须解决的难题。香樟(Cinnamomum camphora)作为上海本地的优势树种(林地中占比约38%),对其三维绿量的快速监测和评估具有重要意义。因此,本研究基于无人机激光雷达所获取的浦江郊野公园三维激光点云与调查数据,探究城市植被三维绿量的快速测量和评估,拟为上海市城市林地结构优化和三维绿量的快速评测提供科学依据。
1 数据与方法
1.1 研究区概况
研究区是位于上海市闵行区浦江郊野公园内的一块30 m×30 m的纯香樟林地,无其他乔灌木树种(图1),香樟在上海林地中占比高达38%,具有典型代表性。
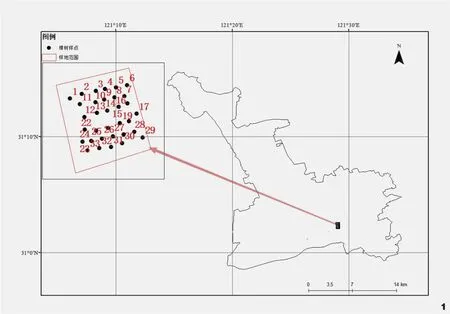
图1 研究区及樟树样点分布Fig.1 Distribution of the study area and camphor tree-like points
1.2 数据来源
1.2.1 无人机激光雷达点云数据
采用飞马D2000四旋翼无人机搭载飞马lidar3000激光雷达系统于2021年9月29日对上海市浦江郊野公园进行激光雷达点云扫描,飞行高度120 m,点云密度41点/m2,采样频率20 HZ,飞行速度14 m/s。飞行时间15 min,扫描面积约266 668 m2。根据香樟样地范围对获得的三维激光点云数据进行裁剪,利用lidar360软件在机载林业模块下对研究区点云数据进行处理,获得如图2所示的香樟样地三维激光点云数据。

图2 香樟点云和剖面图Fig.2 Sample tree point clouds and their profiles
1.2.2 香樟样地调查数据
香樟样地调查数据于2021年9月29日在上海浦江郊野公园测得,包括区内33株香樟的位置(经纬度)、树高、胸径、枝下高、横(东西)纵(南北)向冠长。其中树高和枝下高用以计算树冠的高度,树冠的横纵向冠长用于计算冠径。样地香樟特征情况见表1。

表1 样地樟树特征Tab.1 Characteristics of Cinnamomum camphora trees
1.3 研究方法
1.3.1 无人机激光雷达三维绿量计算
无人机激光雷达三维绿量的计算是基于lidar360软件的机载林业模块进行的,在lidar360软件中,对三维激光数据经过去噪、提取地面点、归一化、单木分割和属性提取等处理,获得每株单木的经纬度坐标、树高(Tree Height)、冠径(Crown Diameter)、冠幅(Crown Area)和树冠体积(Crown Volume)等单木属性数据,其中树冠体积为对应单木的三维绿量。图3为lidar360软件处理点云数据工作流程。

图3 lidar360处理点云数据原理Fig.3 The lidar360 processes the point-cloud data principle
1.3.2 样地调查三维绿量计算
样地调查三维绿量的计算参考刘晓彤等[19]对太原市绿地热环境效应研究中所用方法。不同形态的树冠有着不同的体积计算公式,通过查阅文献,确定香香樟冠形状属于卵形[20],卵形树冠体积计算方法如公式(1)。

式中,x为平均冠径,即东西、南北冠长的平均值,y为冠高,V为树冠体积,即三维绿量。
2 结果与分析
2.1 样地香樟三维绿量分布特征
图4a为样地调查测得的三维绿量分布特征,样地西南角的23、24及33号香樟三维绿量最高,样地东部的15、16及17号香樟的三维绿量次之。图4b为无人机激光雷达手段测得的样地三维绿量分布特征,样地西南角的23、24及33号香樟同为高值中心,东南角的28、29号香樟的三维绿量也相对较高,1号香樟三维绿量也较中心区域略高。两种测量方式下三维绿量的分布均表现为四周高中心低的分布特征。
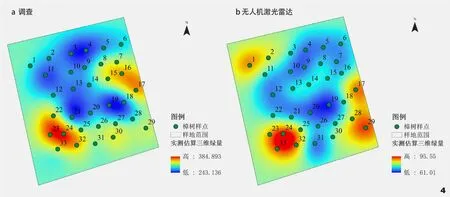
图4 样地三维绿量分布特征Fig.4 Distribution characteristics of sample area three-dimensional vegetation volume
2.2 无人机激光雷达点云与调查估算数据对比
表2为样地内香樟样本调查特征与通过无人机激光雷达测得的香樟特征对比情况。平均树高方面,香樟调查平均树高为9.32 m,无人机激光雷达测得平均树高为10.73 m,比无人机激光雷达的值低15.17%。因为人工测量树高时,树梢的最高点主要靠测量人员的判断。而无人机机载三维激光点云是根据点云统计中的最高点作为树高,树高值的测量更加准确。

表2 无人机激光雷达手段与传统调查估算樟树特征值Tab.2 UAV lidar means and traditional measured estimation of sample tree characteristic value
(1)平均冠径方面。香樟调查平均冠径为8.95 m,无人机激光雷达测得平均冠径为6.81 m,调查值比无人机激光雷达测量值高23.94%,这是因为调查冠径采用的横纵冠长两者平均值估算得来。(2)平均冠幅方面。香樟调查平均冠幅为258.33 m2,无人机激光雷达测得平均冠幅为40.06 m2,调查值比无人机激光雷达测得值高84.49%,这是由于调查冠幅是将香樟冠幅理想地简化为圆形,然后依据圆面积公式求得,而实际冠幅很难是理想的圆形,同时计算冠幅时用到的冠径参数也是依据横纵冠长,所以调查值会偏大。(3)三维绿量方面。香樟调查平均三维绿量为300.27 m3,无人机激光雷达测得平均三维绿量为88.98 m3,调查值比无人机激光雷达的测量值高70.36%,这是由于用调查数据计算三维绿量时,因香樟生长密集,彼此树冠之间有交汇,而调查时并没有对交汇处的树冠进行去重复处理,故而调查计算所得三维绿量并不能很好地反映树冠交汇处的多次计算问题。(4)绿量密度方面。香樟调查平均三维绿量密度为1.14 m3/m2,无人机激光雷达计算的平均三维绿量密度为2.17 m3/m2,调查值比无人机激光雷达测量值低89.31%,这是由树冠交汇处的冠幅重复计算导致的。样地范围为30 m×30 m共900 m2的区域,调查香樟总冠幅(单木冠幅总和)为8 525.04 m2,比点云香樟总冠幅(1 322.10 m2)高7 202.94 m2,高了近5.45倍。(5)总三维绿量方面。基于调查计算的总三维绿量比无人机激光雷达所测高出了5.45倍,相较于样地调查数据,基于无人机激光雷达所测的总三维绿量更加精确。
2.3 单木三维绿量影响因子分析
用线性拟合的方式分别拟合香樟树高、胸径、冠径以及冠幅与三维绿量之间的关系,拟合直线附近的灰色区域为95%置信水平区。图5可知,最终得到的R2结果分别为0.42、0.35、0.87和0.88,香樟三维绿量与冠幅的线性相关性更强。因此在林地三维绿量的计算中如何获得更精细的冠幅二维和三维数据是将来研究的重点。
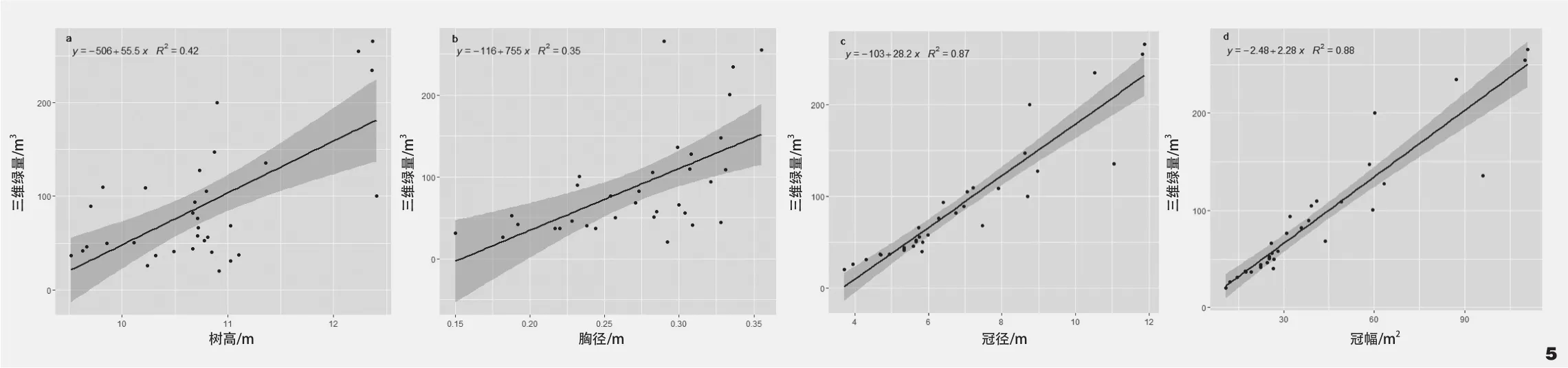
图5 三维绿量与各影响因子的线性回归结果Fig.5 Linear regression results of the Three-dimensional vegetation volume and each influence factor
2.4 无人机激光雷达快速测量三维绿量的应用场景
城市是人类活动的主要空间载体。承载了全球约75%的人口。城市森林和城市绿地是城市中唯一的近自然生态空间,对于维持碳平衡、缓减热岛效应、提升生态系统服务等方面具有重要作用。在城市绿地管理中,可以采用无人机激光雷达手段对城市林地的三维绿量进行快速测量和评价,结合城市生态和环境效益对城市森林和绿地进行综合评价与优化;在城市森林和绿地碳汇研究和管理中,也可采用无人机激光雷手段对大面积林地进行的三维绿量进行快速调查,从而为碳中和、碳汇管理和碳交易提供准确的科学数据。
3 讨论与结论
李肖肖等[21]基于背包式激光雷达对城市绿地树木的三维绿量进行了估算,其结果表明相较于传统方法,激光雷达方法更符合树木的实际情况。本文通过传统调查与无人机激光雷达对上海浦江郊野公园香樟林的三维绿量进行测算,发现两种测量方法下样地中心区域的三维绿量均相对较低,无人机激光雷达测量的单木特征整体精度要优于调查计算,与李肖肖等人研究结果一致。相较于调查数据,无人机激光雷达计算精度提升从高到低依次为三维绿量密度、冠幅、三维绿量、冠径、树高。在总三维绿量方面,调查数据计算的三维绿量值比无人机激光雷达高2.73倍。由此可见,无人机激光雷达测量方法相较传统调查方法在计算三维绿量精度方面有大幅提升[22]。这是由于在对香樟进行样地调查时,属于抽样调查,而无人机三维激光雷达可以对冠层和树高等参数进行精细的刻画和描述。
样地调查方法在数据获取方面也有很大的弊端,诸如成本高、效率低下等;而无人机激光雷达则可以很好地弥补这些缺憾,其成本低、时效性强、效率高、精度准、计算方便。不过无人机激光雷达在快速测算三维绿量方面也有其不足,如其所获取到的点云只包含地面和较高的树冠,树下点云较少。如果林地郁闭度不高,单木分割精度会很好;但如果郁闭度高,单木分割效果会受到很大影响,从而导致单木三维绿量与实际情况出现较大误差[23-24]。相对而言,在城市森林和绿地三维绿量测量时,无人机激光雷达具有广阔的应用和发展空间。
本研究基于无人机激光雷达及样地调查,分别对上海浦江郊野公园样地的三维绿量进行计算。结果表明,在计算三维绿量时,传统的调查方法在单木冠径、冠幅、三维绿量及绿量密度等方面都会产生较大的偏差(23%~89%),在测算总体三维绿量方面,无人机激光雷达手段相对于传统调查估算方法有着明显的精度及效率提升;经计算,上海浦江郊野公园样地的总三维绿量为2 936.54 m3,平均三维绿量密度2.17 m3/m2;单木三维绿量与冠幅的线性相关性更高。本研究可为城市森林和绿地三维绿量的快速测量和评估提供科学依据。
