基于机器视觉技术的前方车辆检测与车距测量算法设计
2022-09-20贺沅玮余有粮喻煜烽
设置汽车安全辅助驾驶系统能够提高驾驶员、车辆的安全性,促进汽车技术的发展。对于周围道路环境感知为实现汽车安全辅助驾驶功能的基础,前方车辆深度信息为保证安全车距和安全换道超车的重点,所以对前方车距探测方法的研究对于汽车安全和辅助驾驶尤为重要
。
1 机器视觉技术的使用背景
计算机视觉领域核心能够实现图像的检索和分类,中国目前常用特征集能够描述图像。功能带为BOF功能线,能够为图像描述提供处理方案,整合特征为一个整体。其次,根据视觉代码特征进行标记,创建新型视觉词汇和收集。此种映射包括主要的频率分布图,BOF能够结合图像处理概念和文本语义,在车辆分类和检索中尤为重要。通过车辆边缘化实现BOF模型的结合,及时检测前方车辆信息。在实际使用过程中,能够实现车辆假设存在区域和假定区域验证。首先,预处理现有图像,然后根据边缘检测技术进行处理,得出假定区域,之后使用边缘检测技术实现第二种处理,得到车辆假定存在区域。之后,将邻域计算方法应用到BOF附近,对假定存在区域进行验证,以此将误报目标消除,使车辆检测效率与准确性得到提高
。
首先,将高度图取反,获得一张存储了表面深度值的深度图,并将深度值规范化到[0,1]的范围内。如图4所示,多边形表面的深度值为0,最大的位移深度值为1。输入的纹理坐标为t0,偏移后的纹理坐标为toff,视差偏移向量为P(视差偏移向量的值决定了最大纹理坐标偏移量和偏移方向)。
2 基于机器视觉的道路前方车辆初定位
利用车辆下部阴影对车辆识别,阴影为灯光下的主要特征,因为一天之内阴影并不会被阳光照射,所以区域在一天内的亮度值并不会改变。车辆前后部结构为水平结构,比如车牌、保险杠、车灯等,在图像中为负阶跃。假如被检测目标车辆与车辆距离比较远,以上水平结构的聚类特征属于目标车辆检测线索。
镇痛效果较好,无牵拉反应视为优。镇痛效果一般,有轻微疼痛视为良。镇痛效果差,孕妇疼痛感明显视为差。优良率为优秀率与良好率之和。
假设道路内部并没有其他干扰信息,车辆范围年内部灰度值具有良好一致性。在存在相同夜间道路光照情况的时候,目标车辆和车辆相聚比较远,路面灰度值比较大。因为目标车辆在不断的行驶,底部存在阴影,路面灰度值比阴影灰度值要高,所以目标车辆底部位置的平均灰度具有负阶跃。负阶跃能够对前方是否出现障碍车辆和障碍车辆位置的条件进行判断,但是并不是唯一的条件。主要外在因素会导致行车道路平均灰度值存在以上负阶跃,比如在路面存在修补痕迹与深色杂物的时候,也能够存在负阶跃。
在车辆存在对应行驶的时候,平均灰度值变化比较明显。图像能够将信息表达出来,所以要精准掌握图像灰度值。假如灰度值的分布简单,表示图像信息比较少,灰度值的分布比较复杂,表示图像的信息比较多。利用熵值对图像信息量进行确定,在图像区域灰度等级比较少的时候,也会降低熵值,提高灰度等级,增加熵值
。假设
指的是概率空间中的事情,平均信息量的计算公式为:

公式1
两条车道线的区域就是感兴趣区,也称之为AOI。以此,基于区域增长算法实现Hough变换,对行车道两条边缘线进行确定。图像在车辆前进方向出现畸变,两条实际平行的车道线在图像中相交一点,也就是虚点或者销售点。

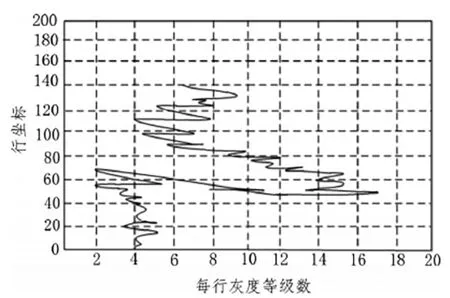
以图2可以看出来,车辆对应灰度等级比较多,灰度变化也越来越明显,因为车辆经过底部车道比较宽,路面灰度范围变化也比较快。所以,灰度等级也比较大,所以要利用路面单位像素灰度等级实现夜间道路前方车辆位置的判断。以上述图像表示:在分析的过程中,要通过图像底边,也就是图像中的0行搜索,在路面平均灰度值曲线在波谷下边缘,路面单位像素灰度等级曲线根据波峰上沿比某个阈值还要大的时候,说明此坐标指的是障碍物底边坐标,障碍物就是目标车辆。通过其他研究表示,假如目标车辆或者在行驶过程中的车辆据哟桥梁阴影和斑马线等阴影,路面单位像素灰度等级曲线并不会根据波峰不断的上沿,不能够超过指定阈值,所以只能够初步定位
。
3 前方车辆的探测和测距
3.1 确定感兴趣区
障碍物探测为安全辅助驾驶的重点,本文假设:
其一,在标准高速公路中,路面中除了行驶的车辆并没有其他的障碍物;
其二,车辆行驶在行车道中;
3.3.2 图像自适应阈值计算
公式中的
(
)指的是事件中各灰度级的概率,
(
)指的是平均信息量,图1为路面单位像素灰度等级曲线,图2为车辆路面灰度等级数变化曲线。
3.2 障碍物检测
弘扬50年治水兴水精神 推进海河水利事业新发展…………………………………………………… 任宪韶(22.11)
在双目视觉测距算法应用到图像采集过程中,利用两个摄像头获取信息。其中的问题就是图像匹配问题,对于同个位置匹配两幅图像。在匹配过程中要对图像矩形框的中心点定位,之后选择车辆中距离中心点最近图像测量,两幅图像视差和车辆最终距离相关,测量过程中使用三角形测距方式测量。

公式2
图像采集指的是三维世界坐标在二维像平面中映射,能够通过几何变换对映射进行描述。以小孔成像模型使单目视觉系统简化成为你摄像机投影模型,图3为摄像机摄影模型。
3.3 前方车距测量
3.3.1 测距模型
公式中的
(
)指的是第
行左坐标,
(
)为
行的右坐标,
(
,
)为像素灰度值,
(
)为灰度平均值。
(
)的改变是因为车辆底部阴影导致的,表示已经检测前方车辆。
本文中障碍物检测是将灰度梯度原则作为基础,在标准路面中作为本车和前车的AOI区域中灰度平缓变化,但是在路面与车辆相交的地方,因为两个后轮存在阴影,导致灰度从亮到暗的水平边缘,检测边缘也就是车辆下边缘。通过AOI中从下到上根据水平线逐行扫描,对每行灰度平均值进行计算:
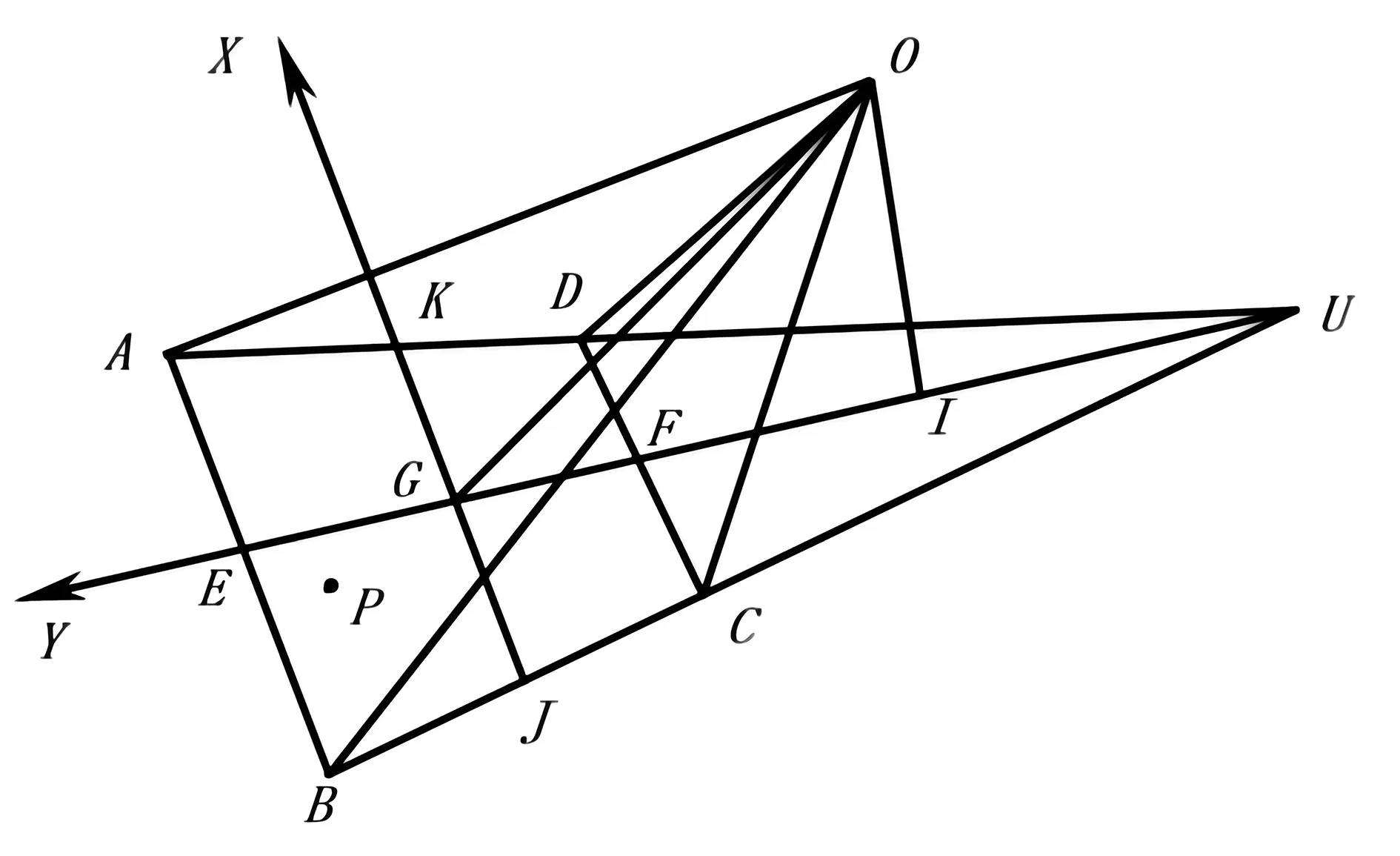
图3中的平面ABU指的是路平面,ABCD指的是道路平面中射线机照射的梯形区域,O点指的是镜头中心点,G点指的是道路平面和光轴的交点,OG指的是光轴,I点指的是O点在路平面中垂直投影。将G点在路平面中定义坐标原点,Y轴方向为车辆前进的方向。
其三,道路为水平直线。
数据应用SPSS 20.0软件分析,计量资料以表示,多组比较使用单因素分析,不同时间点相关指标采用重复测量方差分析,P<0.05为差异有统计学意义。
在车辆行驶过程中能够将部分光源遮蔽,导致车身底部阴影存在。对于整体图像来说,车身底部处于最低灰度值的区域中。但是车辆阴影会随着周围环境改变,出现相应灰度值区域改变。所以,检测车身底部阴影前方车辆,利用自适应阈值图像分割实现。因为车辆在行驶过程中具有建筑物、树木等遮蔽情况,所以使用多次自适应阈值分割的方法,将行进过程中的动态目标进行提取。实现两次自适应阈值分割,实现采集图像的灰度处理,并且扫描图像灰度值,对不同灰度区域方差、均值的确定。在实现第一次图像自适应阈值分割之后,计算图像灰度临界值。然后,基于第一次图像自适应阈值分割对图像数据信息进行过滤信息,并且对灰度区域均值和方差再次计算。一般,第一次图像自适应阈值分割之后得出明显车底阴影。通过两次图像自适应阈值分割之后,得出更加精准的计算效果。第一次图像自适应阈值分割得出均值和方差,过滤图像中的高亮像素和光线比较强的图像部分。另外,自适应阈值也会随着周围环境亮度出现改变,改变阴影部分。第一次图像自适应阈值分割会分割建筑物、树木,导致底阴影的出现。所以,第二次图像自适应阈值分割,能够将第一次分割导致的阴影干扰排除。所以,在处理采集图像的过程中,要实现图像的灰度处理,之后实现两次图像自适应阈值分割,得出处理效果。
对于万能轧机的重轨生产,轧机对型钢断面的轧制要高于普通轧面20 m左右。在离钢轨尾部10 m的范围内,会存在一个高于正常轨道0.5 mm以上的“高点”,该“高点”会在钢轨有0.5 m左右的持续长度。对于这些影响列车运行的“高点”,传统“高点”处理方式为器具打磨,但器具打磨会严重影响钢体的质量与寿命。而使用全轧程热力耦合数值模拟系统,能够完成E孔型和UF孔型的连轧工作。其中UF孔型属于半封闭的轨道孔型,轧件在离开E轧机进入UF轧机的过程中,会由于半封闭孔型而发生“甩尾”现象,轧件尾部会明显高于脱离轧机时的轨高。
雾化吸入治疗过程中,确保患儿采取坐位或者半坐卧位,使膈肌下移,便于雾化吸入后肺部充分扩展,增加气体的交换量。
4 测距试验和校正
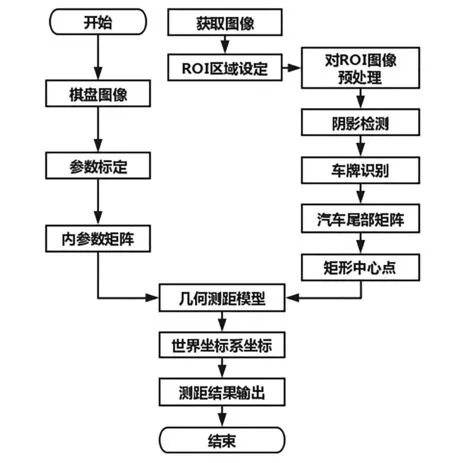
4.1 系统的设计
利用VC++设计平台,使用计算机视觉库OpenCV实现功能,图4为系统的整体流程。
4.2 测距试验和数据校正
实现静态试验,安装摄像机的高度为1.2m,车牌和地面的距离为55cm,公路安全测距超过30m,城市安全距离超过20m,根据测量试验中的距离,通过计算得出摄像机倾角设置为19.2°,表1为静态试验结果。

通过表1可以看出来,总体误差为2%-4%,距离在10-22m之间,主要是因为摄像机误差、人工测量误差导致误差。修正试验数据,根据计算距离与测量距离作为纵横坐标创建直角坐标系,利用最小二乘法对回归曲线拟合,根据校正之后的数据详见表2。通过修正后,能够提高计算距离精度。
(2) 盾构隧道管片收敛整治微扰动注浆施工的影响范围:水平位移和道床沉降为10环,水平收敛和竖直收敛为20环。

4.3 动态车距测量试验
对坐标系与目标点的转换关系明确之后,实现摄像机内外参数标定,保证摄像标定过程中摄像头有固定的位置。首先,设置平面作为参考面板,利用灰度像素对图像优化,实现摄像机内外参数矩阵标定。通过摄像机自身决定摄像机内参数,通过坐标系转换外参数,所以如果出现转变就回重新标定。为了在车辆测距过程中得到精准数据,还要使用雷达等附属设备印证距离精准性。在动态检测车距的过程中,在路况良好的高速路和城市外环路中测试,前后两辆车行驶距离为60-80km/h,相对速度为[1,3]km/h。首先,检测行驶方向是否有车辆,利用摄像头采集图像,根据视觉算法计算车距,表3为车距检测的试验数据。通过表3可以看出来,在车辆处于前方80m之内的时候,测量误差为4m时可以接受的;在超过80m的时候,就会增加误差。在测距为10-50m的时候,误差范围不超过2m。根据以上试验数据表示,车辆距离范围为10-80m,能够保证测距精准性。

5 结束语
本文所提出的道路前方车辆检测方法能够将背景干扰进行去除,利用图像预测对车辆运行轨迹进行分析,使检测精准性得到提高。根据定位、预定位与实时追踪对前方车辆运行轨迹进行追踪,对同个车道车辆位置进行检测,还能够在同个车道车辆位置中进行检测。本文研究能够促进车道信息检测,保证道路交通的安全性。
[1]刘罗仁. 基于机器视觉的前方车辆检测和车距测量算法研究[J]. 电子测试, 2020(19):2.
[2]杨宏伟, 武志斐, 徐光钊. 基于机器视觉的夜间道路前方车辆目标检测技术[J]. 电子设计工程, 2020(17).
[3]程瑶, 赵雷, 成珊,等. 基于机器视觉的车距检测系统设计[J]. 计量学报, 2020, 41(1):5.
[4]王彤. 基于机器视觉技术的舰船行驶轨迹自动检测算法[J]. 舰船科学技术, 2020, v.42(16):56-58.
