基于地面三维激光扫描技术的跨河建筑物测量分析
2022-09-16何子建
何子建
(城乡院(广州)有限公司 广东广州 511300)
为了能够更好地减少船舶与内河桥梁桥墩、上部结构产生碰撞,需要加强内河桥梁桥型的调查与测量,以此来更好地明确桥梁下部结果可以正常通航,确保船舶航行的安全性。以往采用的全站仪、GPS-RTK等模式测量时,会耗费大量获取数据的时长,而且还容易受到地形、信号遮蔽等因素的影响,容易导致测量效率逐渐降低,无法确保测量数据的准确性[1]。而三维激光扫描技术不仅测量的精度非常高,具有较强的数字化特点,而且操作非常简单,具有显著的灵活性,可以在非常短的时间完成对复杂地物的测量,并且在整个测量的过程中也可以实现无接触测量,提高测量的精准性。
1 地面三维激光扫描技术的工作原理
三维激光扫描技术在工作的过程中主要是利用激光的方式对实际距离进行测量工,短时内对大量的激光束进行发射,在发射的同时还可以获取反射信号,在整个过程中就可以直接准确测量测站与目标之间具体的距离值,根据获取的距离值后在利用根据斜度与角度来设定三维坐标[2]。一般情况下,采用扫描仪可以对需要扫描的内容给进扫描,就可以直接获取坐标系,将仪器的中心作为坐标的起点,在仪器扫描的平面内设定x轴、y轴、z轴,将z轴与扫描面呈垂直状态。
2 基于地面三维激光扫描技术的跨河建筑物测量路线
2.1 测量流程
以上海市某内河的桥梁为例,此次工程所需要的成果是与桥梁墩台及梁面相关的结构图,包括平面图和两侧的立面图,此次研究选择三维激光技术完成相关扫描作业,在整个操作的过程中,桥型测量作业流程如图1所示。
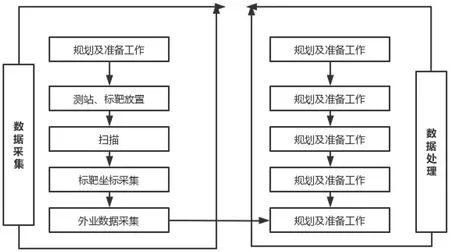
图1 桥型测量作业流程
2.2 采集数据
内河桥梁周边条件具有较强的复杂性,为了确保测量的准确性,需要在测量之前对检测设备进行调试,调试工作完成之后还需要对整个测量任务做好相应的规划和分析,有助于在测量之前,可以确定测量过程中所需要使用的仪器和标靶及具体的安放位置。在对测站点选择时,一定要控制好测站点与桥梁之间的角度、距离,尽可能地保持在安全范围内,符合地面三维激光扫描技术的测量标准,标准范围内的测量可以实现测试数据的准确性和实效性,可以充分实现数据的应用价值;除此之外,还可以有效弥补使用传统多数量测站点采集数据的不足,可以减少工作人员的任务量,提高工作人员的工作效率,实现测量工作的高质量目标[3]。
对点云配准点的数据采集时,需要选择两个测站,这两个测站一般都是需要相邻的,这样才可以保障所观测到的数据更具有真实性和准确性。除此之外,需要在两个站之间设定3 个及以上的公共点,将其作为点云配准点。采集外业数据的时候一般都是在测试区域内完成,测试的过程中通常选择GPS-RTK 模式,这样有助于准确测定一定坐标点的数量够,并将坐标点设定为坐标发热转换点或者是校核点,其中在坐标转换点至少需要3 个在测区周围,摆放时一定要确保分散性,加强对整个测区的控制[4]。
此次研究测量过程中所采用的扫描设备型号为Riegl VZ1000,操作过程中对于水平和垂直方向扫描角度的分辨率要求非常高,均可以达到0.000 5°,距离需要扫描目标100 m 处,扫描仪的扫描精度可以达到5 mm[5]。分别在桥梁的两侧、桥下位置处设置扫描站,每两个扫描站之间需要设置4 个公共点,主要作为点云配准点,即TP01-TP08,除此之外,还需要在桥梁的两侧坐标点,共需15 个,并针对每个坐标点采集相应的坐标,将其作为坐标的转换点或者是校核点。
2.3 点云配准
对于建筑物这种比较大的目标来讲,通常情况下都需要设立相应的配准站,只有将所有测试的数据拼接在一起才可以获取系统化的点云数。点云配准作为地面式三维激光扫描点云处理的关键环节之一,此次是在两组点云局部坐标转换后,出现在同一坐标系中,点云配准后的数据可能会对后续测量数据的准确性造成一定的影响[6-7]。点云配准的具体方式主要包括两种:一是基于特征的配准方式;二是无特征的配准方法。前者主要是指利用点云中具有明显性的特征点作为两组点云的同名特征点,包括人工设置的标靶、特征地物等作为,利用其完成对配准参数的设置;后者主要是指原始点云利用具体算法完成迭代计算,可以完成点云配准的方法。根据以往研究结果发现,根据特征的配准方法更具有实际应用的优势,如标靶、特征地物混合配准方法,此次工程实际测量时便使用此方式[8]。测量的过程中,每两个相邻的扫描站之间都会设立公共点,主要目的就是为了参与配准计算,同一坐标系下的配准点的坐标内容具体如表1 所示。通过分析表1中的数据可以发现,配准点点位残差值均在5 mm 以内,并且对两次不同的配准进行计算时,发现其平均值为3 mm、4 mm,可以发现其数值满足具体规范化的要求。
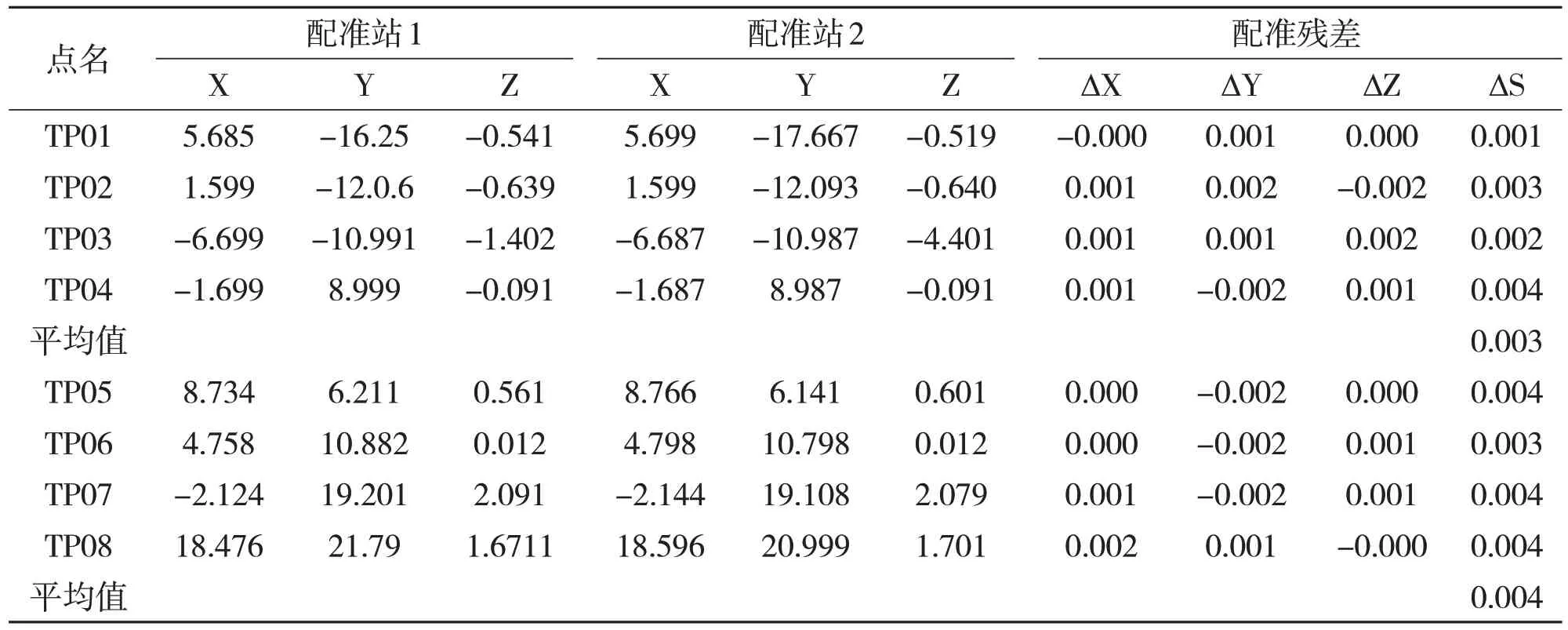
表1 点云配准后各配准点在同一坐标系下坐标对比(单位:cm)
2.4 转换坐标系
配准之后点云依然是局部坐标系,需要将其转换到当前需要的工程坐标系中。点云坐标在转换的整个过程中都需要3 个以上的坐标转换点,在对外业测量的时候,需要准确采集工程坐标[9]。坐标转换点不仅可以用标靶代替,还可以选用具有特性的物点取代。测量内业的时候,在配准后的点云中将这些点取出,并利用点云处理技术将选取的这些点输入工程坐标系坐标中,这就可以直接完成转换计算。
在外业数据测量的过程中需要采集15个坐标点,采集过程中需要选择工具为GNSS,在测量过程中需要与可接收机的网络RTK模式进行有效结合,该次测量该过程中所选择的仪器设备型号为TrimbleSPS985型,仪器标称精度(PTK)平面的方向为8×10-6,防高程的方向为15×10-6[10]。测量时为了确保测量的准确性,需要采用支架完成固定,在增强测量过程中的稳定时,还可以将手动测量或者人工测量中存在的问题排除。有研究表明,这种方式更具有助于直接采用毫米级的PTK平面来准确定位其具体的精度值[10-11]。这种方式在具体使用的过程中,需要先选择一个点位分布非常合理的点,将其作为测量过程中的核心转换点,同时还需要选择4 个点,将剩余的点作为整个校核对中的关键性坐标。坐标转换完成后,点云中所选择的坐标需要再次转换,转换成坐标,通过测量将具体数据记录表内,具体如表2 所示。分析表中数据可以发现转换点的点位残差值均在4 cm以内,平均残差一般为3.3 cm,其相关数据符合规范《地面三维激光扫描作业技术规程(CH/Z 3017—2015)》中转换残差上限值为12.5 cm的指标性要求[12]。

表2 坐标转换后各转换点坐标与实测坐标对比(单位:cm)
3 成果分析
将剩下的11 个坐标点当作该次校对过程中的一个基准点,从而完成对点云结果质量的一个综合性分析和评价,具体内容如表3 所示。通过对表中的数据分析可以发现,点位坐标中存在明显的偏差,最大偏差为8.3 cm,据统计平均偏差为5.3 cm,平面与高程存在的偏差是非常接近的;所选择的校核点通过评估可以直接得到符合点云外的具体精度值,即5.9 cm。其数值可以有效满足《城市三维建模技术规范(CJJ/T 157—2010)》中相关要求:1∶500比例尺桥梁的建模点位中允许存在的误差上限值为15 cm。

表3 校核点点云坐标与实测坐标对比(单位:cm)
4 结语
综上所述,结合跨河建筑物测量,采用地面三维激光扫描技术准确、高效、全天候等优势辅助设计工作人员完成对跨河建筑物一系列项目的测量,通过对数据采集、点云配准、完成对坐标的转化等,都可以直接获取跨河建筑物的相关点云数据,不仅可以避免传统扫描技术中存在的不足,如测量精度差、外业测量流程繁琐复杂等,还可以提高工作效率,为后续相关工作的测量提供有效数据的支持。
