CCTV机器人在新敷设地下管道检测评估中的应用
2022-09-16宋伟健孙海龙杜程远
陈 鑫,宋伟健,李 丛,孙海龙,杜程远
(1.中水东北勘测设计研究有限责任公司,吉林长春 130021;2.河南省地质调查院,河南 郑州 450000;3.吉林省煤炭地质调查总院,吉林长春 130031;4.河南省资源环境调查五院,河南郑州 450000)
人工智能作为计算机科学突破性的学科分支起源于20世纪70年代,21世纪初勘查工程师利用计算机进行学习、推理、思考、规划来模拟人类行为,以满足人工机械智能化的工作需求。随着现代科技的不断进步,信息化技术和人工智能技术得到了快速发展,本文针对广东省东莞市某镇片区水污染综合治理工程的质量检测评估,采用LB-11EH型号高清管道CCTV机器人对新敷设的地下排水雨污管道的施工质量进行物探检测评估[1]。
1 基本原理
LB-11EH管道CCTV机器人主要由自走爬行器、笔记本电脑、控制摇柄、旋转变焦镜头、电缆盘、计数器等组成,控制摇柄和笔记本电脑可通过无线连接自走爬行器完成管道内部的数据采集,其中360°旋转变焦镜头可通过调节分辨率提高采集像素,并根据实际检测任务要求,适当调整相关采集参数。
LB-11EH管道CCTV机器人由左右独立直流电机(马达)驱动,适用于250~1 500 mm地下管道,可在管道内壁原地转弯,并可灵活绕开管内障碍物;防水等级为IP68,最大水下深度可达10.00 m或1.0 bar;内置精度为±1%的倾斜传感器,通过集成一体化彩色广角后视镜头实现坡度测量;集成高亮LED照明灯镜头配置了气压电动升降架,可用于爬行器回收期间观察倒车及线缆回收情况,光照亮度可调,具有聚光及泛光功能。针对以往CCTV机器人无法自主制动的缺点,LB-11EH管道CCTV机器人配置了电动离合,可使机器人在斜坡上驻停,掉电可自动解除;同时具备爬坡技术和合理的重心设计,能有效防止翻车,当镜头升降台降至最低时,爬行器的最大抗倾斜能力可达到40°。该CCTV管道机器人具有两种规格的爬行轮组:内径95 mm,外径160 mm,适用于500~1 500 mm的管道;内径45 mm,外径135 mm,适用于直径375~600 mm的管道。
LB-11EH管道CCTV机器人的旋转变焦镜头采用高清晰度彩色摄像头,可通过手动或自动方式进行对焦,可遥控120倍变焦(10倍光学变焦和12倍数码变焦);镜头可轴向360°、垂向180°旋转,具备一键自动归正和防雾功能;内置压力感应器,处于加压或低压状态进行报警;LB-11EH管道CCTV机器人有一组镜头光源,两组辅助光源,光照强度可调;成像芯片为彩色1/4 CCD,其分辨率可达到44万像素,光敏感度小于0.1 lx;PAL制式下水平解像度大于450线,色彩高于525线;前、后视画面可瞬时切换,切换后画面显示等待时间应少于0.5 s[2]。
LB-11EH管道CCTV机器人配套电缆盘具有自动排线功能,标配线缆长150.00 m,搭配精准电缆线计数器,能够精准定位CCTV机器人的具体位置。
1.1 管段损伤参数
管段损伤参数是计算缺陷破损程度的重要参数,S是地下管线存在的每一处缺陷的算术平均值,Smax是其中的最高分值。管段损伤参数计算公式:
式中:n——结构性缺陷数量;n1——垂向净距大于1.50 m的缺陷数量;n2——垂向净距大于1.00 m且不大于1.50 m的缺陷数量;Pi1——垂向净距大于1.50 m的缺陷分值;Pi2——垂向净距大于1.00 m且不大于1.50 m的缺陷分值;α——结构性缺陷影响因子,与缺陷间距有关,当缺陷的垂向净距大于1.00 m且不大于1.50 m时,α=1.1。
1.2 结构性缺陷参数
地下管线的结构性缺陷参数F的确定,是通过比较每一标段桩号管线的损伤参数,从中选取较大值获得。依据开关效应原理,当存在管段全线不通或阻塞时,管段的损伤程度等级应该由该桩号管线中最严重程度的缺陷决定。管段结构性缺陷参数计算公式:

1.3 结构性缺陷密度
当存在结构性缺陷时,管段结构性缺陷密度SM计算公式:

式中:L——管段长度,m;Li1——垂向净距大于1.50 m的结构性缺陷长度,m;Li2——垂向净距大于1.00 m且不大于1.50 m的结构性缺陷长度,m。
SM是基于管段缺陷平均值S所对应的缺陷总长度占管段长度的比值。该缺陷总长度是计算值,并不是管段的实际缺陷长度。缺陷密度值越大,表示该管段的缺陷数量越多。
1.4 管段修复指数与养护指数
修复指数RI、养护指数MI指当结构存在本体缺陷或功能性损伤时,在判断其缺陷等级后,结合该管段部位的重要程度和周围各类管线的位置因素,确定管段修复与养护紧迫性的参数。管道只要存在缺陷,就需要进行可控时间范围内的修复与养护施工。但是,在出现修复或养护能力有限、进行修复或养护的工作人员任务繁多等突发情况时,应当根据缺陷的严重程度、缺陷对周围环境的影响程度、缺陷的轻重缓急程度,及时制定管道修复或养护施工计划。修复或养护指数是制定施工计划的重要参考依据,RI,MI按下式计算:

式中:K——地区重要性参数;E——管道重要性参数;T——土质影响参数;G——功能性缺陷参数;*——卷积计算符号。
2 数据采集
按照正确方式连接CCTV机器人设备,通过无线操控手柄控制井下的CCTV机器人行进路线,进行管线内的采集数据,采集处理流程见图1,图1中d表示管径。
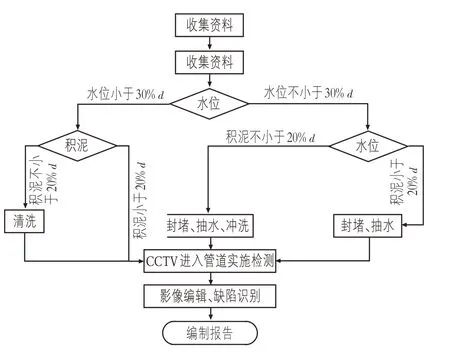
图1 LB-11EH管道CCTV机器人工作流程图
3 数据处理及评价
依据CJJ 181-2012《城镇排水管道检测与评估技术规程》[3]的相关规定,对管道缺陷评估方法进行简要说明如下:当缺陷长度不大于1.00 m时,长度应按1.00 m计算;当垂向范围1.00 m以内同时存在两个甚至更多管线缺陷时,分值应当迭加计算,缺陷分值最大不超过10分。
1)管道结构性缺陷分类包括破裂(PL)、变形(BX)、腐蚀(FS)、错口(CK)、起伏(QF)、脱节(TJ)、接口材料脱落(TL)、支管暗接(AJ)、异物穿入(CR)、渗漏(SL)等。具体缺陷评价如下。
管道的围岩压力超过管段自有承受力,管线产生了裂隙等现象时应评价为破裂,其形式为环向、垂向和复合;管道受向内径方向压力,管线产生了形态变化时应评价为变形;管道的内侧管壁由于污水排放物的侵蚀,管线产生了剥落或流失,并伴有凹凸面甚至露出管段钢筋时应评价为腐蚀;两个管段在接口处发生横向扭曲,管线未位于正确位置时应评价为错口;接口处发生偏移,管道垂向位置发生变化,管线产生了低洼积水现象时应评价为起伏;两个管段受各向压力影响,管线在接口处产生了松动脱离现象时应评价为脱节;管段内发现沥青料、混凝土料、橡胶圈等类似管线接口材料时应评价为接口材料脱落;支管管段直接接入主管而未通过检查井时应评价为支管暗接;管道系统内全部设施以外所有物体穿透管壁进入管线内时应评价为异物穿入;管线外任何流动性液体深入或流入管段内时应评价为渗漏。
2)功能性缺陷分类包括沉积(CJ)、结垢(JG)、障碍物(ZW)、残墙和坝根(CQ)、树根(SG)、浮渣(FZ)等。具体缺陷评价如下。
杂质在管道底部沉淀淤积评价为沉积;管道内壁上的附着物评价为结垢;管道内影响过流的阻挡物评价为障碍物;管道闭水试验时砌筑临时砖墙,试验后未拆除或拆除不彻底的遗留物评价为残墙和坝根;单根树根或是树根群自然生长进入管道评价为树根;管道内水面上的漂浮物评价为浮渣,该缺陷需记入检测记录表,不参与计算。
4 数据成果分析
4.1 管道检测
此次工程实例的检测区域为广东省东莞市某镇片区水污染综合治理工程的西南村祥和街-丹桂路路段,该区域管道为管径300 mm的HDPE双壁波纹污水管道,检查井井号分别为CAW-5,CAW-6,CAW-7,CAW-8,CAW-8-1,CAW-8-2,CAW-8-3,CAW-8-4,CAW-9,WF-6,采用LB-11EH管道CCTV机器人进行井下检测,共计检测管9段道,长132.56 m。
4.2 管道缺陷检测成果
此次物探检测评估9段管道,存在功能性缺陷管道4段,结构性缺陷管道1段,结构性缺陷与功能性缺陷并存现象为4段管道;存在缺陷31处,其中结构性缺陷18处,功能性缺陷13处,见表1。

表1 管道缺陷检测成果表
此次物探检测管道结构性缺陷和功能性缺陷的评级成果见表2。

表2 管道结构性缺陷与功能性缺陷评级成果表
5 结语
针对数字智慧城市建设中管道质量检测和维护的难题,LB-11EH管道CCTV机器人解决了管道检测中存在的工程量大、准确率低和人员作业危险等技术难题,同时可以更好地适用于较复杂的地形,轻易且顺利地实现管道内行走式采集数据的繁复工作,很大程度提高了管道检测的效率和人工检测的安全性。通过以上工程实例证明,应用LB-11EH管道CCTV机器人能够达到此次项目地下管道质量评估检测的目的。
