传声器阵列声压级在线校准*
2022-09-16陈勇吴鸣杨军
陈 勇 吴 鸣 杨 军
(1 中国科学院大学 北京 100049)
(2 中国科学院声学研究所噪声与振动重点实验室 北京 100190)
0 引言
近年来,户外噪声监测研究随着环境噪声污染的日趋严重而得到极大发展[1]。当在户外环境中对某一目标噪声源进行声压级测量时,为了有效抑制非目标声源的干扰,胡文林等利用传声器阵列进行波束形成从而对目标信号进行增强[2-4]。常见的波束形成信号增强算法包括:延时求和波束形成法(Delay and sum beamformer,DSB)、自适应波束形成算法(包括最小方差无失真响应(Minimum variance distortionless response,MVDR)波束形成算法、线性约束最小方差(Linearly constrained minimum variance,LCMV)自适应波束形成器、广义旁瓣相消器(Generalized sidelobe canceler,GSC))、多通道维纳滤波器、后置滤波算法等。此外Wang等[5]提出一种基于最大期望值的迭代波束形成方法在一系列叠加的工业宽带噪声中有效监测出目标信号的功率值。为抑制户外风噪对传声器监测的影响,Zhao等[6]利用便携式刚性球形传声器阵列来减轻风噪声,而保持目标低频噪声的声压级。另外在城市噪声监测中,基于聚类的声源分类算法[7-8]被使用以用于城市街区局域声源监测。
微机电系统(Micro-electro-mechanical system,MEMS)传声器阵列由于体积小、价格低等优点,在进行声源定位或者语声增强中得到广泛应用。当使用MEMS阵列进行波束形成时,隐含地假设阵列的每个通道都具有标准的频响特性,但由于传声器、相关放大器和采样组件的制造公差以及长期使用所带来的老化问题,传声器通道之间存在较大幅值和相位误差,导致MEMS传声器阵列并不能形成理想的波束形状[9-11],在进行噪声测量时得不到准确的声压级值。因为器件老化是不断缓慢进行的,在每次进行测量之前,均需要对传声器进行灵敏度校准。
对于需要长期在户外工作的传声器阵列而言,在全消室中通过比对标准传声器与每个待校准传声器的频域响应[12],从而确定出真实的灵敏度的方法不仅费时费力而且不切实际。由于在进行户外噪声监测时,传声器阵列采集的信号是波束形成后的整体输出,本文介绍了一种对传声器阵列整体进行在线声压级校准的方法。该方法基于一种计算量相对较小的到达时间差(Time difference of arrival,TDOA)声源定位方法,利用环境干扰声源的瞬态特性,在每个时频点挑选出目标声源的有效信号值,通过在线补偿校准传声器与阵列输出信号之间的目标声源声压级差,从而校准传声器阵列测量的声压级。上述声压级校准实验在全消环境中进行,通过比较不同条件下的声压级校准偏差的一致性,证明该校准方法具有较好的精确性和鲁棒性,并且可推广于任意一种阵型的传声器阵列测量装置。
1 传声器阵列声压级在线校准方法
MEMS 传声器由于受工艺误差和环境损耗等因素的影响,在频域响应上产生失真,其灵敏度不断退化。如图1 所示,当传声器灵敏度发生退化后,波束形成的幅值响应会产生失真,从而使测量的噪声声压级出现偏差。为了能够实时校准传声器阵列,实验中在阵列中心安装了一个标准参考传声器,通过在线计算参考传声器与阵列间的声压级偏差,从而补偿传声器阵列的误差。当在多声源干扰情况下,传声器阵列与参考传声器间的声压级差与无干扰时相同,则证明提出的户外在线校准方法有效。
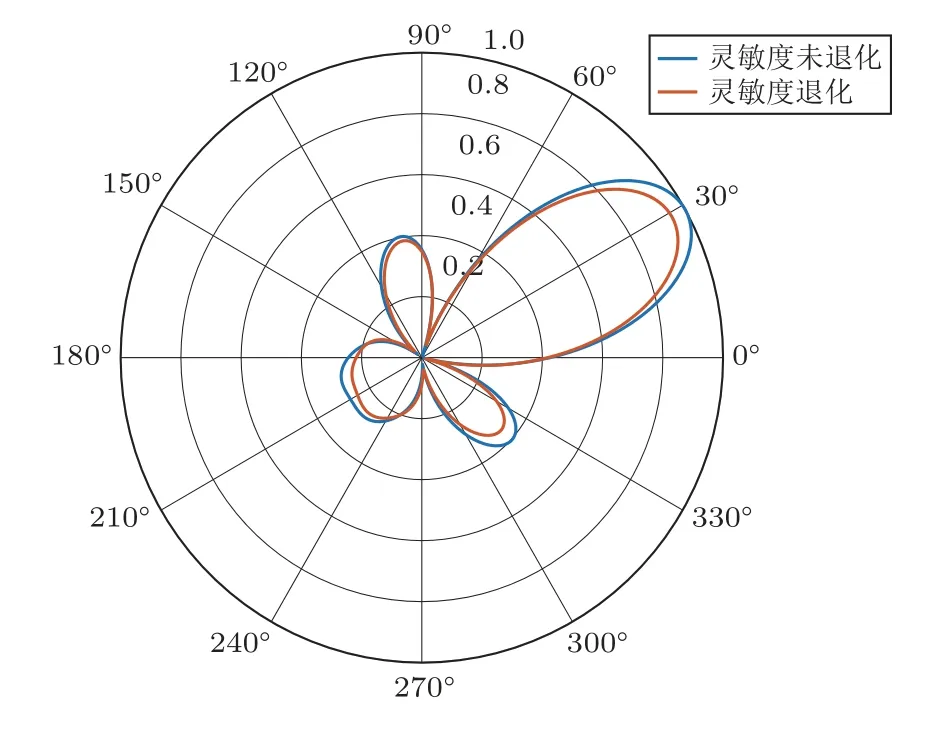
图1 延迟求和波束形成仿真图Fig.1 Delay and sum beamforming simulation
如图2所示,声压级校准方法的主要步骤为:

图2 声压级校准方法流程图Fig.2 Sound pressure level calibration method process
(1)对采集信号进行短时傅里叶变换(Short time Fourier transform,STFT),窗为海明窗。
(2)检测每一帧信号是否来自于单声源。
(3)对满足单声源条件的帧信号进行入射方向DOA估计。
(4)对目标方向单帧信号进行延迟求和波束形成(DSB),并进行单频点DOA 估计,剔除非目标方向干扰信号,将每一帧挑选出的时频点信号累计在一个新的数组中,最后计算声压级。
(5)对参考传声器接收的数据,同样进行单声源和时频点挑选,并累计起来,对最后累计起来的数值进行声压级计算。
(6)计算标准传声器与MEMS 传声器阵列之间的声压级测量值偏差。
1.1 单声源检测法
当传声器阵列在户外进行噪声测量时,接收到的信号往往受其他方向环境声所干扰,因此需要判决每一帧信号是否来源于单一声源。当传声器阵列记录的信号只来源于一个声源时,则传声器信号之间具有很强的相关性。所以为了检测每一帧数据中是否主要由单一声源信号组成,本文使用互相关方法来判决传声器对之间的比值是否接近于1[13]。
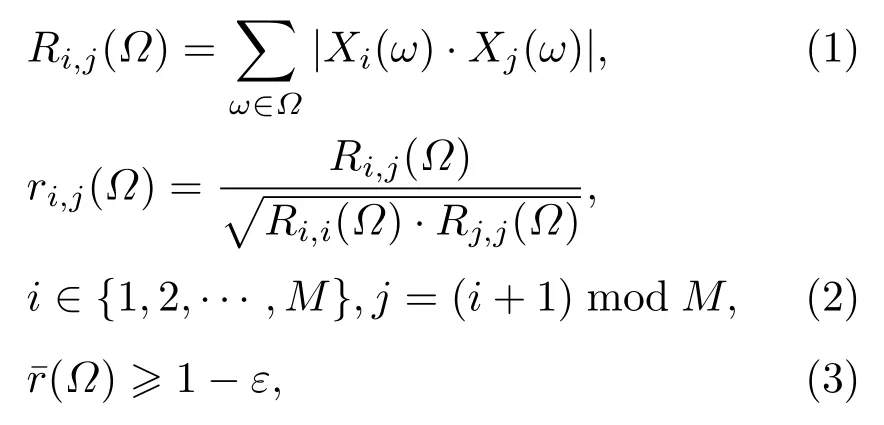
其中,Ω为角频率点范围,ε为一个较小的阈值,选择为0.05。(Ω)为各对ri,j(Ω)的平均值。当前帧如果满足公式(3)所示的条件时,则认为当前帧为单一声源组成。然后对当前帧的声源信号进行方向估计,当声源方向为目标方向时,再进行接下来的计算。
1.2 TDOA估计方法
基于时延估计(TDOA)的声源定位方法在线性阵列与环形阵列等多种阵型中得到大量展开[14]。由于环形阵列相对线性阵列具有分辨任意方向的能力且尺寸较小,在本文中使用一种利用均匀环阵的TDOA方法来估计声源的入射方向。
图3 显示了一个均匀环阵分布着M个传声器,其中l是两个相邻传声器间的距离,r是环形传声器阵列的半径,任意两个相邻传声器的夹角α为
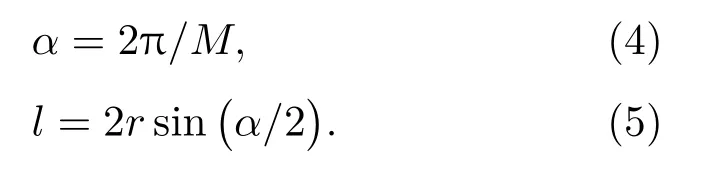

图3 环形传声器阵列Fig.3 Circular microphone array
假设传声器阵列所处环境为二维平面自由场,任意传声器mi所接收的信号为
其中,aig是第i个传声器与第g个声源间的传播衰减因子,θg是第g个声源的入射方向。假设在某一时间段内,仅有入射方向为θ的声源s存在,则相邻传声器对{i,i+1}接收到的信号之间的相对延迟如式(7)所示:
因此,第i个传声器接收的信号xi(t)可以由下列递归方程表示:

其中,ni(t)是传声器背景噪声。假设Ri,i+1(ω)是信号xi(t)与xi+1(t)在频域上的互相关函数,
其中,Xi(ω)和Xi+1(ω)分别是xi(t)和xj(t)在频域上的变换,ω为角频率,φss(ω)是声源s(t)的功率谱密度函数,则传声器对{i,i+1}之间的相位旋转因子为

由于传声器对{mim1}接收到的信号之间的相对延迟τi→1(φ)为

φ为入射角自变量,则{i,1}之间的相位旋转因子定义为

通过式(12)可以求出积分互谱:
因此在判断单一声源的入射方向θ时,可以利用

同理单频点方向θ(ω)判决如下:


整个DOA判决过程如图4所示。
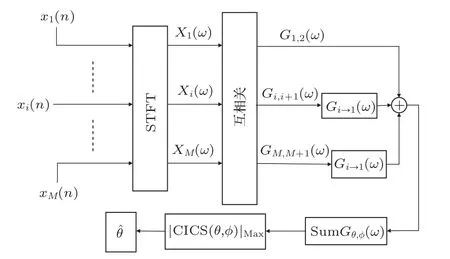
图4 DOA 判决流程图Fig.4 DOA decision process
1.3 声压级偏差计算
声压级偏差是指参考传声器测量声压级与传声器阵列测量声压级间的差值。当在干扰情况下计算的声压级偏差与无干扰情况下的声压级偏差相一致时,则证明本文提出的校准方法有效。时域上的声压级计算方法[15]如式(16)所示:

其中,代表平均功率值:

而根据式(18)的帕塞瓦尔定理,同样可以在频域上计算信号的声压级。
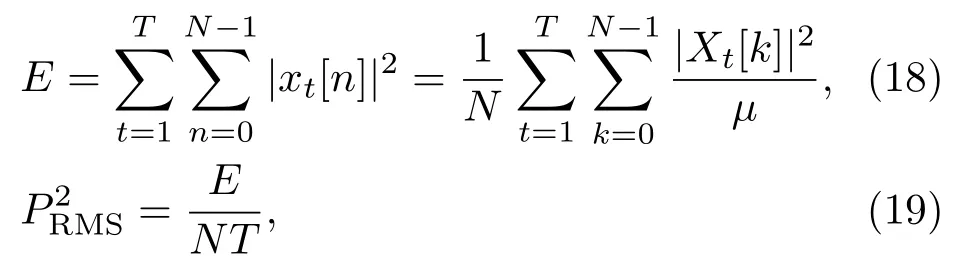
其中,N代表每一帧的长度,T代表总帧数,μ代表信号由于加窗时造成的能量损失系数。根据上述公式,对挑选出的频点进行累计即可求出声压级,从而求出声压级校准偏差ΔSPL。

其中,SPLref表示参考传声器测量的声压级,SPLDSB表示阵列传声器进行延迟求和波束形成后测量的声压级。当校准偏差估算准确,则对传声器阵列信号补偿偏差值即可校准测量的声压级。
2 目标声源声压级校准实验
2.1 相关参数及实验平台
考虑到户外环境中有地面反射的影响,在半消实验室中采集了实验数据以验证上述校准方法的准确性与有效性。实验设备如图5 所示,本实验使用半径为6 cm,具有9 个单元的均匀圆形阵列。根据空间奈奎斯特采样定理,该阵列可有效分辨4000 Hz 以下的声源信号位置。该阵列的传声器为MEMS 类型的SPH1642,标准传声器为BK-4189。声源摆放距离传声器阵列4 m 远处,高度与传声器阵列高度一致。目标声源摆放在29°,干扰声源摆放在100°和252°处,声源同时发声并通过BK公司的PULSE-3050 采集系统进行采集,系统的采样率为48 kHz,采样量化位数为16 bit,参考传声器的灵敏度为0.0498 V/Pa,阵列传声器的灵敏度未知,采用采集电压信号来衡量其大小。对采集到的信号进行声压级校准处理,并验证算法在不同噪声干扰情况下的性能。
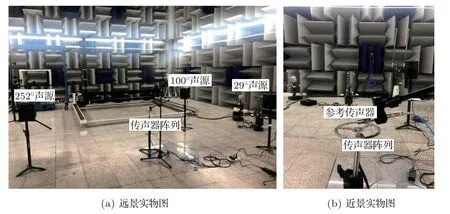
图5 传声器阵列信号采集图Fig.5 Microphone array signal recording
由于户外监测的目标声源通常是稳态声源,而干扰声源为非稳态的环境噪声,干扰声源通常具有短时间内平稳但长时间范围内不稳定的特性。通过公式(2)计算出混合信号的互相关系数差值1-r(Ω)。图6 为稳态流水声与鸡叫声混合信号的互相关系数差值,当短帧信号仅包含单一声源时,互相关系数差值为趋近于0 的稳定数值,如图中红线所示。当出现瞬态干扰信号时,互相关性系数差值相较于单一平稳信号会产生较大波动。因此为了能够有效挑选出仅包含单一稳态声源的单帧信号,要求干扰信号有大于单帧信号时间长度(40 ms)的暂停间隙。而常见的自然噪声均满足此条件。为此实验中选取了符合条件的声源类型作为测试对象,见表1。干扰噪声为常见的动物鸣叫声和周围工厂的施工噪声,这些噪声源均具有声音随时间变化较大不会长期持续稳定存在的特点。
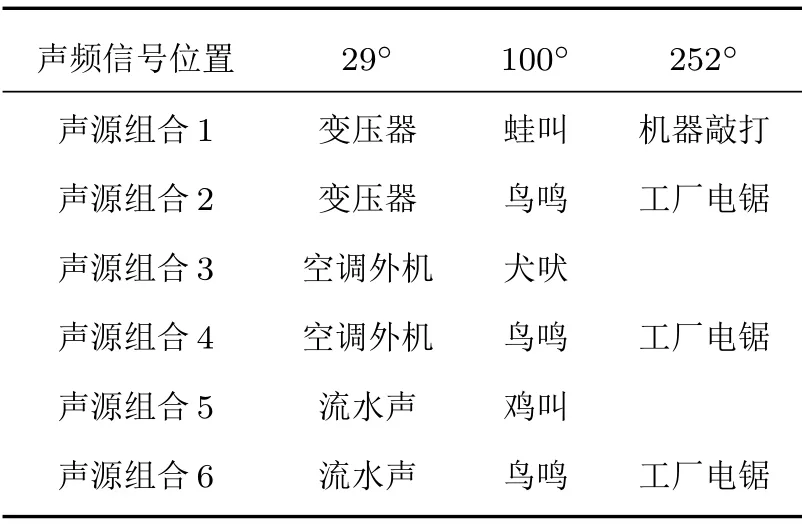
表1 采集声源组合Table 1 Sound source combination
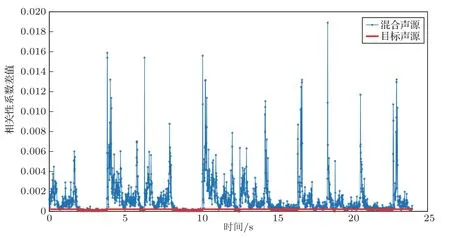
图6 混合信号互相关系数时间分布图Fig.6 Time distribution of mixed signal cross-correlation coefficient
2.2 实验结果
如图7 所示,噪声源由目标方向的空调外机噪声和干扰方向的鸟叫声与工厂电锯噪声组成,由图2 所示,先挑选出仅来源于目标方向声源的单帧信号并进行波束形成,单帧信号长度为2048。由于挑选出的单帧信号在部分频率点上仍有干扰声源与目标声源重叠的问题,需要在每一帧信号下挑选出纯净的频率点信号。考虑到干扰声源的稀疏性和时变性,在较长时间下可以在全频率范围内挑选出仅来源于目标方向的纯净信号。由于单频点DOA估计算法准确率存在一定误差[16],所以选择保留ˆθ(ω)∈29±5°的频率点信号,对于挑选出的信号进行累计并计算出目标信号的声压级偏差[17]。
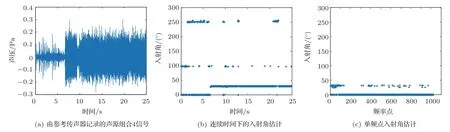
图7 TDOA 法估计声源位置Fig.7 Estimate the location of the sound source by TDOA
为了验证实验方案的有效性与精确性,首先计算了直接进行波束形成的声压级偏差,校准偏差取5次测量值的平均,实验结果见表2。
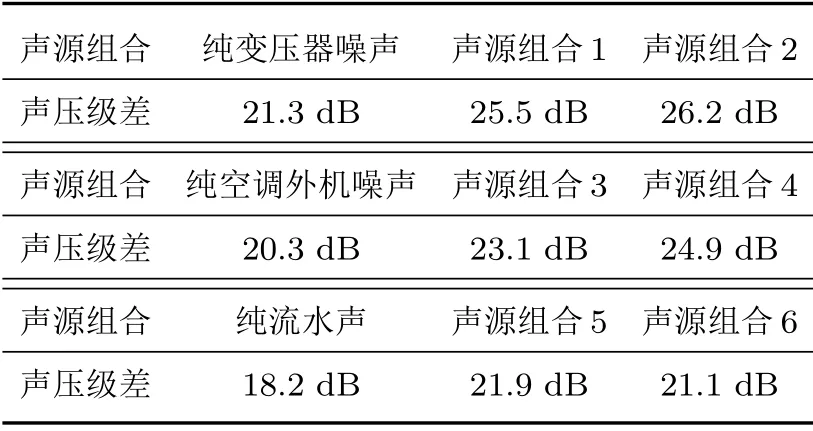
表2 无算法处理下的声压级估计偏差Table 2 SPL estimation deviation without algorithm processing
然后对混合噪声进行频点挑选处理,再计算声压级校准偏差,实验结果见表3。
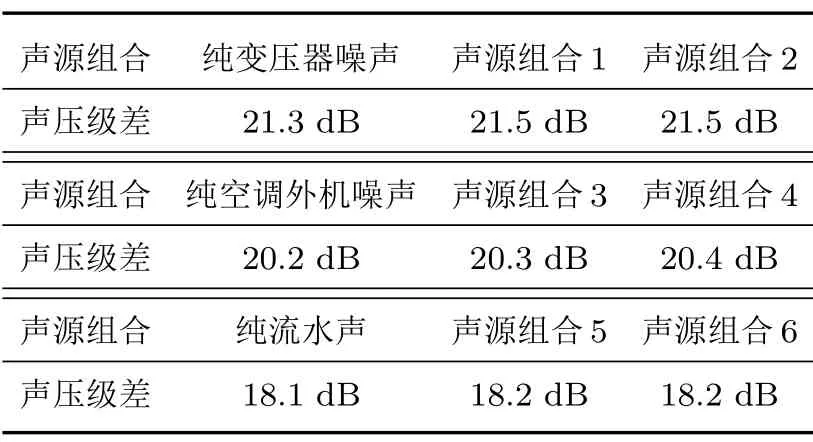
表3 算法处理后的声压级估计偏差Table 3 SPL estimation deviation without algorithm processing
从表2中可以看出,3种不同类型的目标声源具有不一样的声压级差值,这是由于阵列传声器在低频范围内的频率响应衰减较大,当声源频率集中在低频部分时,信号衰减较多,从而导致传声器阵列测量的声压级偏小。而参考传声器具有理想频率响应,这使得具有不同带宽分布的目标声源之间具有不同的声压级差值。另外由于参考传声器接收的信号为各个方向的混合噪声,而传声器阵列接收的信号是进行波束形成增强(DSB)后的目标噪声,因为波束形成可以有效抑制非目标方向的噪声信号,噪声抑制量在4 dB 左右,从而使得声压级偏差与无干扰情况下的值相差较大。
而从表3 中可以看出,利用时频点挑选法得到的声压级差和无干扰下得到的声压级差相近,且分布较为均匀一致,误差在0.3 dB 之内。具体偏差分布如图8 所示,由此可以证明介绍的算法准确性较好,将实时计算的声压级偏差补偿给传声器阵列即可进行有效在线校准。由于使用的声源都是户外常见的自然声,因此证明该方法可用于在户外干扰情况下进行传声器阵列的在线校准。当使用其他结构的传声器阵列如三维球型阵列监测全空间范围内的声源时,只要阵元间距满足奈奎斯特空间采样定理时,修改阵型的几何结构信息,该校准方法即可推广于任意一种阵型的传声器阵列噪声监测装置。
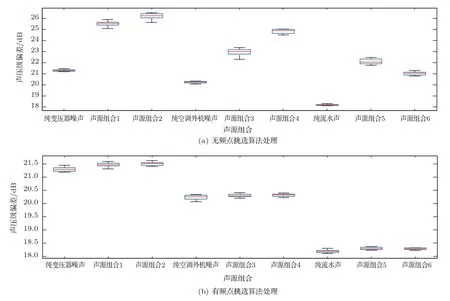
图8 声压级估计偏差分布图Fig.8 Distribution of SPL estimation deviation
由于本文提出的户外传声器校准方法基于目标声源定位和波束形成增强算法,目标声应为远场点声源。当目标声源为宽范围声源时,定位准确性性能下降,从而使校准声压级差值偏差较大。而当干扰噪声为马路噪声等宽范围声源时,干扰声源与目标声源方向应相距较远,声源角度偏差10°以上,从而避免由于同方向干扰声源的影响,降低校准性能。
3 结论
本文介绍了一种适合于在户外进行目标噪声监测时对MEMS 传声器阵列整体进行声压级在线校准的方法。该方法通过TDOA估计法对实时采集到的信号进行有效挑选,计算出标准传声器与阵列整体间的声压级偏差,通过补偿该偏差从而达到对传声器阵列进行在线校准的目的。文中通过实验对比了多种声源干扰下与无干扰下的声压级校准偏差的一致性,偏差的误差值保持在0.3 dB 之内,证明该方法具有较好的精确性和鲁棒性。由于核心算法是利用TDOA估计法对时频点进行挑选,所以只要修改阵列形状的几何信息,即可推广于任意一种阵型的传声器阵列噪声监测装置。