基于专利分析的我国工业机器人发展态势研究
2022-09-15吴颖
吴 颖
(唐山市科学技术情报研究所,河北 唐山 063000)
机器人被誉为“制造业皇冠顶端的明珠”,其研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志[1]。工业机器人是我国智能制造2025 的核心抓手之一,是我国制造业产业升级的核心环节。专利作为科技发展的前沿蕴含着大量的技术创新信息,通过对我国工业机器人的专利进行分析能够客观地认识到我国相关技术的研发现状,对相关部门的决策制定及调控技术布局具有一定的意义。
1 数据来源及处理
本论述选用Incopat 平台进行专利数据检索,以关键词和IPC分类号来制定检索策略,数据经过降噪处理得到有效专利41 303条,将检索数据导入Excel进行分析及作图。
2 我国工业机器人专利申请态势分析
专利申请趋势是技术研发态势的重要参考指标,由图1 可见,2000 年之前,我国相关专利申请量较少,共申请112件,这个阶段为我国工业机器人技术的萌芽期,由于年限较为久远,这些专利均已失效,1986 年是我国工业机器人专利的申请元年,共有3 件,其中2 件来自德国,1件来自日本。我国申请人的第1件专利申请是1987年的“自适应通用柔性机械手机构”。2000年之前的专利,研发内容主要为机械手和末端执行器,国内申请人的专利申请占比为58.04%,其他均为外国来华的专利申请,可见国外申请人已经较早对我国工业机器人进行专利布局,其中日本和美国专利布局较早、数量相对较多,占比分别达到14.29%和11.61%。

图1 我国工业机器人相关专利申请趋势
2000~2012年为我国工业机器人专利申请的快速增长期,此阶段共申请专利2 960 件,此时的研发内容仍以机械手和末端执行器为主,经统计得出有效专利为596 件,占比为20.14 %,这些专利寿命维持时间较长、专利价值较高。此阶段国内申请人申请的专利占比为90.41%,对此领域的技术有了很大发展且专利布局的意识也已经明显提高,值得注意的是日本和德国的专利申请量仍然占到5%和1%。
2013 年以来为我国工业机器人的专利申请爆发期,自2019 年开始已经突破6 000 件/a(专利申请数据公开时间具有3~18 个月的滞后性,2021 年及以后的数据不具有参考价值),此期间的专利申请量已经达到38 000 余件,机械手和末端执行器的主研地位依然稳固,焊接技术的研发热度已经逐渐超过机床的零部件。此阶段国内申请人的专利申请量占比已经达到98.55%,日本和德国的申请量共占1%,这与我国实施创新驱动不断提高制造业的国际竞争力及颁布一系列的激励政策有着密不可分的关系。
3 我国工业机器人专利申请技术构成分析
技术构成一般采用国际专利分类号IPC进行分析,表1 为我国工业机器人专利检索结果中IPC 相关技术领域申请量排名前15的技术分布情况。其中,技术申请最活跃的3个领域分别为B25J、B23K、B23Q,三者的申请量之和约占总申请量的70%。工业机器人一般由机器人本体、控制系统和驱动系统3 个部分构成,将IPC 技术领域与其对照匹配后发现我国工业机器人的专利申请主要分布在机器人本体技术领域。由统计分析可得,排名前15的技术领域中属于本体的技术构成占总申请量的81.11%,其技术占比具有绝对优势,也就是说我国工业机器人的技术非常密集的分布在机械手、末端执行器和传动部件上,尤其是机器手和末端执行器的专利技术申请量占据总申请量的一半以上。排名前15的技术领域中属于控制系统的IPC技术领域分别有G05B、B65G、G01B、G06F,其专利申请量占总申请量的6.14%。前15 名中属于驱动系统的IPC 技术领域分别有H02K、F16H,其专利申请量的占比仅为1.85%。通过以上数据分析可知我国工业机器人的控制系统和驱动系统的技术领域分布较为欠缺。由表1中的发明专利数据可发现控制系统的发明专利占比相对较高,其专利质量较高。
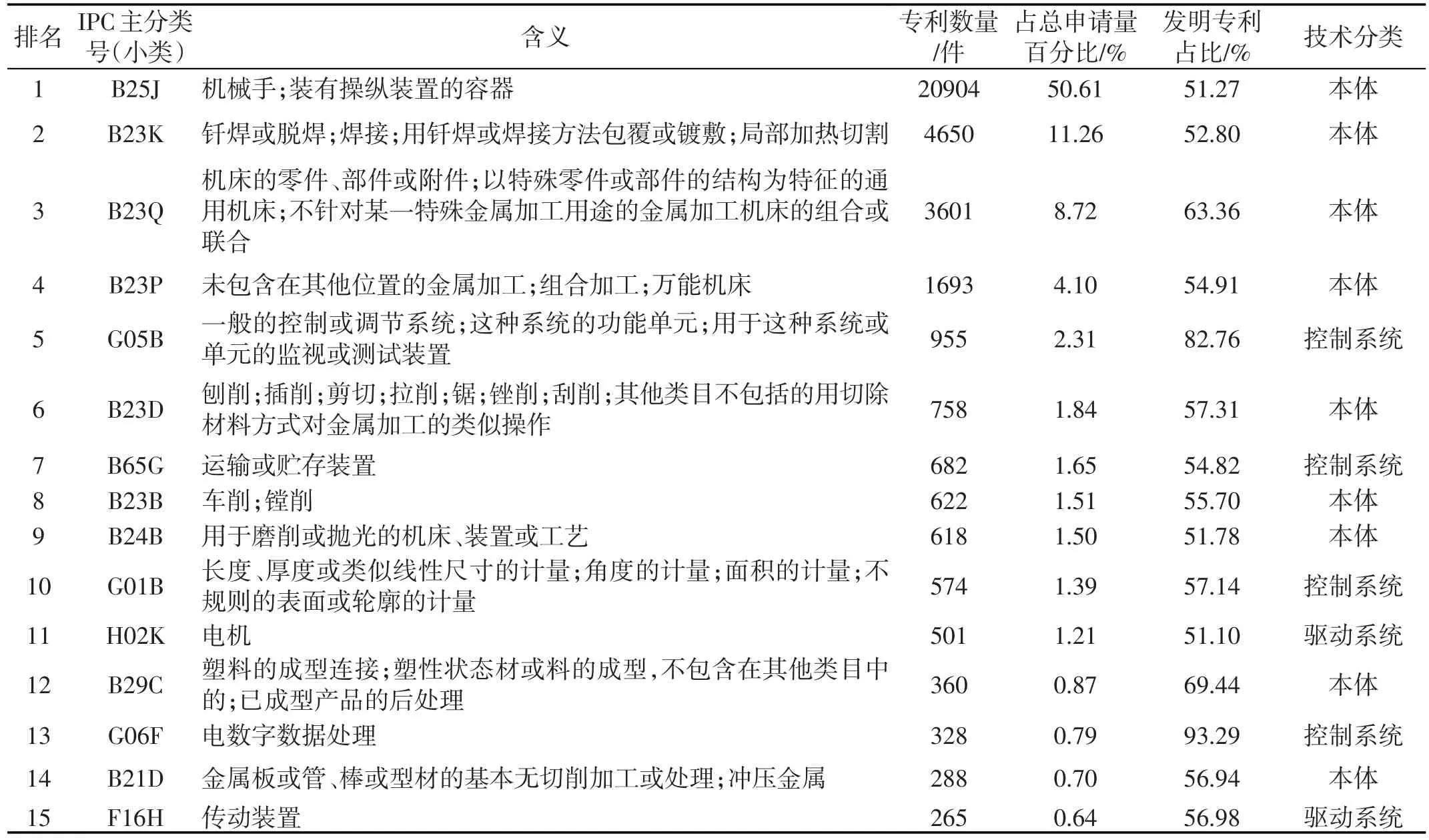
表1 我国工业机器人专利申请技术构成表
4 专利申请人分析
4.1 申请人类型分析
由图2可见,我国工业机器人的技术创新主体包括企业、大专院校、个人、科研单位和机关团体。其中,企业申请占比65.3%,大专院校申请占比22.16%,个人申请占比9%。企业作为技术领域的主要创新主体说明我国工业机器人技术已经较为成熟,科技创新活动已经不仅仅停留在研发阶段,而是已经逐步转到成果转化及市场应用阶段。《2021 年中国机器人产业发展报告》显示,2020 年我国工业机器人市场为全球贡献了40%左右的份额,连续多年稳坐世界最大机器人消费国地位[2]。我国工业机器人相关专利的申请由国内申请人和国外来华申请人2 部分组成,在41 303 件专利中,国外来华专利约900 余件,占我国总申请量的2.18%。经进一步分析可知,国外来华的申请人中企业占比达93.95%,国内则占到64.69%,可见国外来华企业具有明确的目标市场,为进一步的商业活动做好技术布局基础。
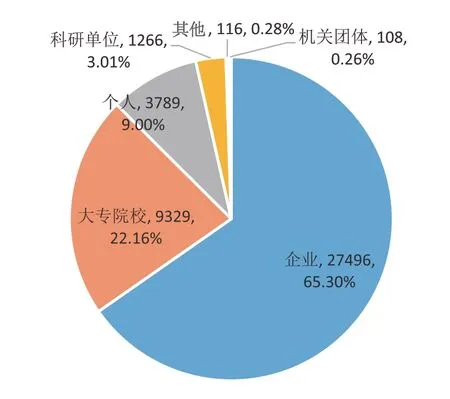
图2 我国工业机器人专利申请人类型
4.2 主要申请人分析
通过对我国工业机器人相关专利数据进行统计分析,可了解此领域的主要创新主体情况。图3为我国工业机器人技术领域排名前20的专利申请人。其中,高校申请人有17名,企业申请人有2名,科研院所有1名。对主要申请人的技术构成进一步分析发现,他们的共同点为技术申请均主要集中在本体构成的机械手及末端执行器领域。在此基础上,珠海格力电器股份有限公司在机器人本体的传动部件中技术申请数量稍显突出;浙江工业大学、华南理工大学、西北工业大学在控制系统的专利申请数量稍显突出;珠海格力电器股份有限公司和哈尔滨工业大学在驱动系统的专利申请稍显突出。对主要申请人的专利类型进行统计得出,广西大学、哈尔滨工业大学、上海交通大学的专利申请中发明专利的占比具有绝对优势;哈尔滨工业大学、华中科技、上海交通大学的发明专利授权率遥遥领先,通过这些统计数值可以大致了解相关申请人的专利质量情况。
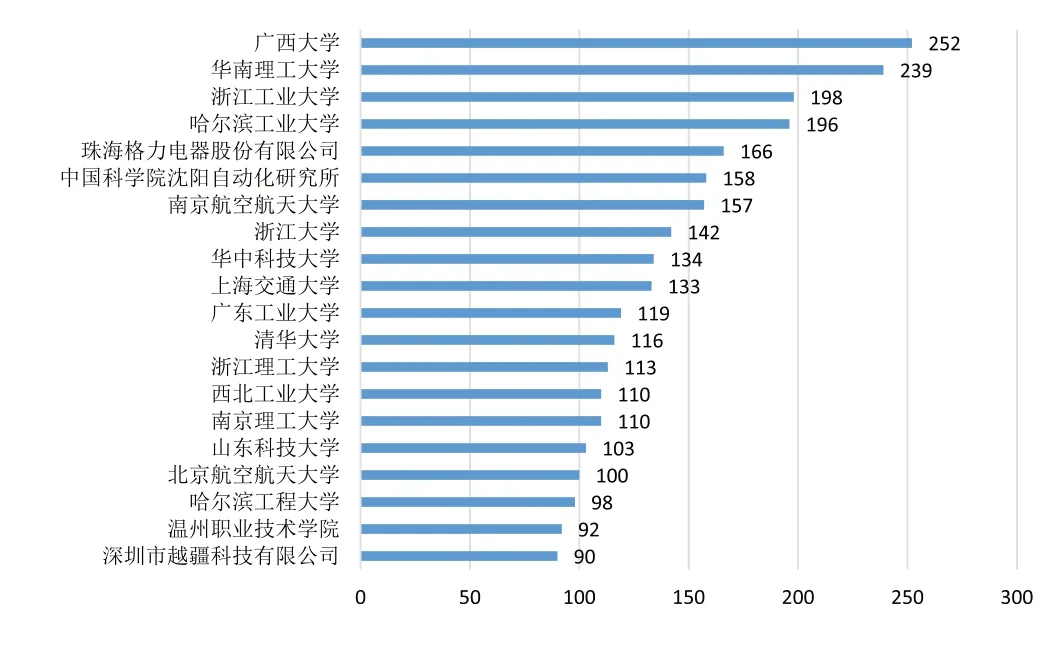
图3 我国工业机器人排名前20的专利申请人
5 地域分布及特点分析
我国工业机器人专利申请地市排名如图4 所示。统计区域排名前10地市的专利申请量占全国专利申请量的41.16%,可见我国工业机器人的技术发展具有明显的区域集聚特点,主要分布在长三角地区、珠三角地区和京津地区。对主要申请人的技术构成进行分析可得,苏州的技术分布较为全面,技术构成排名前15中有10 个IPC 排名均为首位;北京在机械手和控制系统的技术布局较为突出。

图4 我国工业机器人专利申请地市分布排名
地域分布排名第1的是苏州,其主要申请人有苏州艾利特机器人有限公司、江苏捷帝机器人股份有限公司和苏州高通机械科技有限公司等。苏州的前10申请人中仅有一所高校,其他均为企业,可见,此地区工业机器人的产业化程度较高。排名第2的地市是深圳,其主要申请人有深圳市越疆科技有限公司、大族激光科技产业集团股份有限公司和哈尔滨工业大学(深圳)等。深圳排名前10 申请人中由7家企业和3所高校共同组成,可见此区域的产业化程度也在逐渐提高。排名第三的地市是上海,其主要申请人有上海交通大学、上海大学和同济大学等。上海地区的前申请人由5所高校、4 家企业和1 家科研院所构成,可见此区域处于研发阶段的技术占有很大比例。
6 小结
通过对我国工业机器人专利申请数据进行统计分析,其技术发展呈现以下特点:
(1)我国工业机器人的专利申请态势分为3 个阶段:2000 年前为技术萌芽期,专利申请数量较少,且已经全部失效;2001~2012年为技术发展增长期,专利数逐渐增多,目前仍有20%的专利为有效专利,专利价值较高;2013年至今为技术发展爆发期,专利申请增长速度急剧加快。我国工业机器人技术起步较晚,外国来华申请人对我国专利布局较早且萌芽期申请量占比较高,随着我国技术的快速发展,我国专利申请量爆发式增长,申请量占比也越来越高。
(2)我国工业机器人的专利申请的技术研发热点主要分布在机器人本体,排名前15的技术构成中分布在本体的技术有9个IPC分类,其申请量占总申请量的81.14 %,其中机械手和末端执行器的技术领域最热门,申请量约占总申请量的一半;机器人的核心技术大多分布于控制系统和驱动系统,然而我国工业机器人在控制系统和驱动系统的技术领域分布较为欠缺,排名前15的技术构成中二者申请量之和约占总申请量的8%。近年来,我国工业机器人技术快速发展,但是在控制器、减速器和伺服电机等方面的技术与国际先进技术相比还有较大差距,很多产品依然依赖进口。
(3)我国工业机器人的创新主体类型主要为企业和大专院校,分别占申请人总量的65.3%和22.16%。我国排名前20的申请人中大专院校占有17个名额,可见,我国工业机器人的技术虽主要由企业掌握,但是技术分布较为分散,尚未形成技术垄断型企业。相比之下,高校对此领域的技术研发更为集中。排名前20的主要申请人的技术构成与我国工业机器人总体技术构成特点相同,以机械手和末端执行器的技术研究最为热门。
(4)我国工业机器人的技术发展具有明显的区域集聚特点,通过主要申请人的排名可知其主要分布在长三角地区、珠三角地区和京津地区。可见,我国工业机器人技术发展较好的地市均分布在经济较发达地区。长三角地区布局有较为完整的工业机器人产业链条,其本体研发及生产企业占比位于全国产业集聚区域首位[3]。在京津冀协同发展战略的有效引导和高效推动下,京津冀三地机器人产业逐步形成优势并存、特色互补的发展格局[3]。北京市作为三地机器人技术最早的发源地,其专利技术资源优势比较明显[4]。京津冀地区机器人本体研发企业相对较少,大多集中在核心零部件创新及系统集成方面。
与世界发达国家相比,我国工业机器人的很多关键核心技术仍然有待进一步突破,高端供给仍显不足,行业应用水平有待进一步提高[5]。建议如下:
(1)科学制定发展战略,进一步完善政府扶持政策体系。加强统筹规划,国家、省市一盘棋,上下联动。坚持“政府引导、企业参与、市场运作”的指导思想,加快转型升级的步伐。
(2)加强核心技术攻关,建立健全创新体系。保持我国研发数量持续增长的势头,加强控制系统和驱动系统的技术布局,提高专利质量和专利转化能力,核心技术和关键零部件创新有序推进。
(3)龙头企业带动特色产业集群发展。着力发挥龙头、骨干企业的核心带动作用,实现机器人产业链上下游协同发展,推动优势产品规模化生产。企业间开展技术、融资等多种形式的联合、并购和重组,形成相互竞争又相互合作的技术组群和产业集群。
(4)健全人才保障体系。加强机器人科技人才和操作技术人员培养,建设机器人理论研究、技术开发和技术应用专业团队。支持高校和科研院所引进高层次人才,培养专业技术和复合型高端人才。
