基于速度随机分布的低空空域小型无人机碰撞风险评估模型*
2022-09-15王莉莉阳杰
王莉莉 阳杰
(中国民航大学空中交通管理学院 天津 300300)
0 引言
近年来,随着低空空域的逐步开放,无人机技术的迅速发展,在低空空域运行的无人机种类和数量飞速增长。小型无人机具有价格低、便携性强、可获取度高等特点[1],在航拍、侦察、检测等领域应用广泛,未来将会有更多的小型无人机运行在低空空域,日益增多的无人机运行在同一空域内,其冲突问题也日益凸显。故研究低空空域内小型无人机的碰撞风险迫在眉睫。
目前国内外对于无人机碰撞风险的研究大多数是引用载人机的碰撞风险理论对无人机之间以及无人机与载人机之间的碰撞风险进行研究。在国外,Durrant等[2]建立基于马尔可夫的无人机防撞模型,并使用蒙特卡洛算法进行求解;Tyagi等[3]通过无人机安全系统建立了无人机与运输机之间的碰撞风险评估模型;Lancovs等[4]在路径规划的基础上验证无人机防撞模型;Zhang等[5]借鉴民航客机冲突区域理论建立了在非隔离空域下的圆柱形无人机碰撞风险模型;Gan等[6]构建了无人机圆柱体静态保护区模型,并提出了1种基于无人机紧急避碰轨迹的三维动态避碰区域建模方法检测2机碰撞趋势。在国内,刘畅等[7]通过几何方法确定无人机碰撞区域表达式,而从建立动态碰撞区的数学模型;高俊杰[8]以载人机为主体设置碰撞模板,建立了隔离空域内无人机避让侵入载人机的安全飞行风险评估模型;贺强等[9]在模糊认知图的基础上建立了无人机飞行风险评估模型;杨新湦等[10]考虑民机尾流对无人机的影响,对Reich碰撞模板进行改进,分析了不同民机速度与机型对碰撞风险的影响;邓力[11]使用分列步θ法求解碰撞概率模型,得到无人机与民航客机碰撞概率与2机几何中心距离的关系;潘卫军等[12]考虑人机环管等因素,计算不同空域无人机与载人机之间的侧向安全间隔;赵建华等[13]通过AHMEMCR模型分析了无人机不同机型与运输类飞机之间的碰撞概率及与碰撞模板表征值的关系;王莉莉等[14]引用载人机位置误差概率模型从碰撞风险的角度分析了物流无人机在航线飞行时3个方向的安全间隔。
以上研究中,大多引用载人机碰撞理论对无人机碰撞风险进行研究,而二者在体积、速度和运行方式上均有较大差异,直接使用载人机碰撞理论会对无人机的碰撞风险评估会产生较大误差。如高扬等[15]针对低空空域开放后自由飞行的通用航空器建立了基于速度矢量分析的航空器碰撞风险评估模型,并为航空器构建了长方体碰撞模板,后有学者将该模型理论应用于无人机的碰撞风险评估中。但在实际运行中,该模型与无人机的运行特点相差较大。首先,无人机在运行时避让性能较好,可以在极短时间内作出避让动作,若直接引用民航运输机理论将碰撞模板设置为机身尺寸的2倍则会造成碰撞空间的冗余;其次,无人机相较于民航运输机而言,运行速度和方向较为随机,若采用长方体碰撞模板,由于速度方向的随机变换,则在分析时需要不停对长方体模板的长短边相对位置进行调整,不便于分析计算;最后,在该模型中,将无人机速度视为线性变化并未考虑速度随机变化的特性,且未考虑无人机实际的速度和定位误差的影响,将导致研究结果不够准确。基于此,根据小型无人机避让特性及速度方向随机变化的特点,针对不同运行方式的无人机设置不同的碰撞模板,为固定路径飞行的无人机设置以自身尺寸为参考的长方体碰撞模板,为自由飞行的无人机设置符合实际运行特点的双层球体碰撞模板,设置避险层和碰撞层,将无人机速度大小视为服从随机分布,并综合考虑无人机飞行特点、定位误差、速度误差、人机系统等因素的影响,建立新的低空空域小型无人机之间的碰撞风险模型,并通过算例分析及对比分析,验证该模型在计算低空空域无人机运行条件中的准确度。
1 无人机碰撞风险模型
1.1 低空空域无人机飞行特点及模型假设
无人机在低空空域飞行时主要采取全球导航卫星系统(Global Navigation Satellite System,GNSS)定位方式,由无人机操纵员根据实时定位信息在地面对无人机进行操纵,但大多数无人机已具备自主冲突避让能力,即配备了机载冲突探测与决策设备,在探测到冲突后可以在短时间内自主做出避让决策及反应,避免冲突的发生。
在低空空域,无人机速度与体积都较小,可按照固定的轨迹进行飞行,也可以自由飞行,相比于载人机而言,无人机的飞行更为灵活,不仅飞行速度和方向可以随机变化,而且在探测到冲突后进行避让机动性大,可以在极短时间内进行反应。
基于以上分析,为建立低空空域小型无人机碰撞风险模型,假设如下。
1)无人机1为电力巡检类无人机,作为威胁机以恒定最大速度v1沿固定轨迹在空域中飞行,并对无人机2的飞行安全产生威胁,在飞行过程中不进行避让。
2)无人机2为航拍类无人机,作为探测机在空域中自由飞行,以速度v2在空间各方向随机飞行[15],速度服从[v2,min,v2,max]的均匀分布,但在短时间dt内可视为做直线运动,并在飞行过程中对空域内其他无人机进行探测,一旦探测到威胁,无人机2将以航向解脱方式进行避让。
3)假设低空空域内气象风方向为水平方向,且在无人机飞越该空域时间段内空域内各处风向和风速保持不变。
1.2 碰撞模板
为了建立碰撞风险模型,建立碰撞模板。由于无人机1在飞行过程中不作避让动作,故不需考虑其避让特性,以无人机1的长宽高设置长方体碰撞模板1,当其他航空器接触碰撞模板时则视为2机发生碰撞。无人机2在飞行中遇到风险时,需要进行避让,且避让机动性较大,在其探测到威胁后,只要在避险时间内做出决策即可避免冲突的发生,故以无人机2飞行速度与最短避险决策时间的乘积设置避险层,以无人机2自身尺寸为参考设置碰撞层,为更加贴合无人机2运动方向随机及避让机动性大的飞行特点,将无人机2碰撞模板设置为球体。无人机2在飞行过程中,当避险层外界探测到威胁时,只要在避险层设置的范围内进行正确的解脱决策则2机不会发生碰撞,若避让失败使其他航空器与碰撞层接触,则视为2机发生碰撞。
设无人机1和无人机2的长、宽、高分别为λ1x,λ1y,λ1z和λ2x,λ2y,λ2z,m。以无人机1为基准建立碰撞模板A,以无人机2为基准建立碰撞模板B,则模板A的长宽高分别为λ1x,λ1y,λ1z,m。模板B碰撞层半径为λ2=max{ }λ2x,λ2y,λ2z,则球体半径为

式中:o2(v2,t2)为避险层的宽度,m;避险层宽度与无人机2的飞行速度v2和最短避险决策时间t2有关,假设当无人机2探测到威胁时飞行速度为v2,则o2(v2,t2)=v2·t2。
以此建立无人机之间的双碰撞模板,见图1。
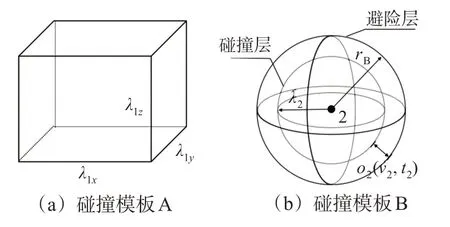
图1 碰撞模板Fig.1 Collision template
1.3 空域因素影响的碰撞风险模型
无人机在低空空域飞行时,碰撞风险数值的大小与其实际位置直接相关,由于定位设备的精度等原因,其实际位置会与预定航迹存在偏差,将会影响2架无人机之间的实际间隔,从而影响无人机飞行安全。由于机载设备及环境等因素,其飞行速度也会存在一定的误差,且从动态飞行的角度看,速度偏差也是影响无人机飞行安全的因素之一,故在分析碰撞风险时需要考虑无人机飞行的定位误差和速度误差。
设无人机的定位误差服从均值为μg,方差为的正态分布,即定位误差模型为εg~N(μg,。设速度误差服从均值为μv,方差为的正态分布,即飞行方向速度误差模型为εv~N(μv,)。则根据正态分布理论,在正态曲线中,99.99%的面积在平均值左右4个标准差4σ的范围内,故可认为当定位误差和速度误差分别取4σg和4σv时可以满足绝大多数无人机的误差影响,为使模型具有普适性,则计算碰撞风险时无人机定位误差和速度误差分别取4σg和4σv。
2架无人机在实际飞行中,根据相对运动关系可将无人机2视为相对静止状态,则2架无人机发生碰撞的情况见图2。

图2 碰撞过程示意图Fig.2 Schematic diagram of collision process
考虑风对无人机相对运动的影响,设无人机1与无人机2在xoy面的相对速度为v12xy,m/s;无人机1与无人机2在z轴方向的相对速度为v12z,m/s;则无人机1相对于无人机2的运动速度大小v12为

设无人机1速度方向与x轴夹角为φ,rad;无人机2速度方向与xoy面的夹角为θ,rad,向上为正,向下为负;无人机1与无人机2速度在xoy面上投影分量的夹角为φ,rad;气象风与无人机1速度方向的夹角为γ,rad;气象风速为vwind,m/s。由于无人机2速度方向服从均匀分布,故θ在上均匀分布[15],φ在[0,π]上均匀分布[15],考虑2架无人机的速度误差,则

式中:σiv(i=1,2)为无人机i的速度误差标准差。
则根据式(2)可得

根据假设,无人机2速度v2大小随机变化,则其数值服从[v2,min,v2,max]的均匀分布,根据均匀分布理论[15],其概率密度函数为

则考虑无人机的定位误差,无人机1在一段时间间隔Δt(h)内相对与无人机2运动的距离s12为

式中:vr(v12)为时间Δt内2架航空器相对速率的平均值,m/s;σig(i=1,2)为无人机i的定位误差标准差。
令碰撞模板A避险层在一段时间间隔Δt内扫过的空间为Ω,则Ω的体积VΩ为

此过程中,若碰撞模板B碰撞层与空间Ω接触,则认为2架无人机发生碰撞。
令碰撞模板B避险层构成的空间为Γ1,体积,则将空间Ω与Γ1的并集视为碰撞空间Θ,在整个运动过程中,也可以将无人机2视为质点,在碰撞过程中,若该质点在碰撞空间Θ中,视为2架无人机发生碰撞,其中碰撞空间Θ的范围及其体积VΘ为

无人机1和无人机2发生碰撞次数为C=nVΘ,通常认为1次碰撞为2次飞行事故的发生,所以单位时间内2架无人机的碰撞风险CR1的计算见式(11)。

式中:Δt为无人机1沿固定航迹在低空空域飞行的时间,h;N为空域中无人机1的数量,架;n为空域中无人机2的密度,架/km3。
1.4 综合因素影响下的碰撞风险模型
结合低空空域小型无人机运行特点,在空域因素影响的基础上,考虑人机系统(无人机)来评估无人机飞行安全。
人机系统的影响包括无人机正常飞行能力和无人机操纵员保证安全飞行的可靠程度。正常飞行能力主要包括无人机系统的可靠性和稳定性2部分[16],可靠性主要为无人机在外界干扰下继续保持正常飞行的能力和探测冲突后的正常解脱能力;稳定性为排除外界影响因素外无人机内部发生故障的概率[8]。在无人机飞行时,无人机操纵员保证安全飞行的可靠性也是影响无人机碰撞风险的因素之一,根据文献[17],其定义为:无人机操纵员在规定的时间限制内成功完成所制定的任务的概率。
假设无人机系统的可靠性即无人机排除干扰保持正常飞行的能力和探测冲突后的正常解脱能力为k1,无人机内部发生故障的概率为k2,无人机操纵员的可靠性为k3。则根据以上分析及式(11)可以得到无人机在低空空域综合因素影响的碰撞风险CR为

2 算例仿真与分析
2.1 算例仿真
为了验证该模型的合理性,通过算例分析低空空域内无人机之间的碰撞风险,选取大疆M600无人机和M300无人机作为研究对象,分别计算碰撞风险与空域内无人机密度的关系,模型计算相关参数见表1~2,其中定位误差标准差、速度误差标准差由实际数据通过仿真系统获得。

表1 M600无人机相关参数Tab.1 Related parameters of UAV M600

表2 M300无人机相关参数Tab.2 Related parameters of UAV M300
由于目前国内缺少低空空域无人机飞行的数据,故通过假设完成仿真分析。假设无人机1飞越某低空空域时间为0.2 h,无人机1速度方向与x轴夹角为,该空域气象风与无人机1速度方向的夹角为γ=π/3,气象风速为vwind=4.13 m/s[18],且由模型假设可知无人机2解脱方式为航向解脱,利用速度障碍法计算的无人机避险决策时间为t2=0.98 s[19]。假设在该空域内2架无人机的比例为1∶1。空域内无人机系统的可靠性k1、无人机内部发生严重故障的概率k2和无人机驾驶员的可靠性k3见表3[8,16,20]。

表3 模型计算相关参数Tab.3 Parameters related to model calculations
将以上数据代入式(11)~(12),分别得到低空空域内2种型号无人机在设定参数条件下碰撞风险与该空域内无人机密度的关系,见图3。

图3 碰撞风险与无人机密度的关系Fig.3 Relationship between collision risk and UAV density
由图3可见:空域内无人机碰撞风险随无人机密度的增加而增大。空域内无人机密度为0时不存在碰撞的风险,随着密度增加,无人机在运行时由于速度和方向随机,产生的冲突也随之增加,密度较小时,由于单位面积的空域内无人机数量较少,增加一定架次的无人机,其数量增长的变化率(增加架次/增加前空域内无人机总架次)较大,而在密度较大时,由于空域内已有很多架无人机,其产生的碰撞风险已较高,即使无人机的数量继续增加,风险值的变化率也较密度小时小。故在密度较小时随着密度的增加碰撞风险值增加较快,密度较大时增加较缓慢。且由于M600无人机机身体积较M300无人机大,所以在特定空域中相同的无人机密度下M600无人机碰撞风险大于M300无人机的碰撞风险。
根据计算结果可知:在此特定参数低空空域中,无人机M600密度n≤4.2架/km3,无人机M300密度n≤5.0架/km3时,在综合因素影响下2架无人机的碰撞风险小于5×10-9次事故/飞行小时,满足ICAO规定的安全目标水平。若在此空域内2种型号无人机密度分别大于4.2架/km3和5.0架/km3,则无人机产生冲突的风险较大,不满足运行要求。
根据以上计算结果可知该空域内碰撞风险与无人机密度呈正相关关系,符合实际认知,验证了模型的可行性。
2.2 结果对比分析
将2.1中计算参数代入文献[15]构建的有人机碰撞风险评估模型中,可以计算得到M600和M300在空域内最大安全密度分别为2.03架/km3和2.65架/km3,将该计算结果与本文改进模型研究结果进行对比,见表4。由表4可见:本文改进模型计算得到的M600和M300最大安全密度较有人机碰撞风险模型分别提高了106.9%和88.7%。由于原模型碰撞模板设置为长方体,且模板尺寸为机身尺寸的2倍,在计算碰撞风险时将造成碰撞空间冗余,从而使最大安全密度偏小,计算结果较为保守,不利于无人机空域的合理利用,同时,根据分析可知,无人机碰撞风险与无人机密度关系并非呈现线性关系。

表4 结果对比分析Table.4 Comparative analysis of results
综上所述,本文提出的无人机碰撞风险评估模型具有实际应用价值,通过碰撞模板的改进,加以考虑无人机各类误差具有现实意义,建立的基于速度随机分布的低空空域小型无人机碰撞风险评估模型更加符合无人机运行实际,在满足安全运行要求的同时可以提高该空域内无人机数量,进而提升空域利用率和无人机运行效率。
无人机在低空空域飞行时,空管部门可以通过无人机监视系统的数据来预测该空域内所有航空器的数量,并利用该模型计算出无人机之间的碰撞风险,与安全目标水平进行比较,从而制定不同空域下的无人机管理政策。
此外,当空域内无人机机型和人员设备发生改变时,空域内碰撞风险也会发生变化,因此,空管部门以及无人机管理人员可以采取不同措施来减小碰撞风险。
3 讨论
针对低空空域小型无人机运行安全问题,通过模型假设、碰撞模板改进、运动过程推导以及影响因素分析建立了基于速度随机分布的无人机碰撞风险评估模型,并通过算例仿真验证了模型的可行性和合理性,但依然存在以下局限。
1)通过情景假设建立评估模型,在假设中将空域内2架无人机分别定义为固定路径飞行和自由飞行,仅为空域内众多无人机的2种飞行模式,未来随着无人机种类和数量的增加以及空域的逐步开放,该运行模式不足以覆盖空域内所有无人机的运行,故需要对不同运行模式下的无人机碰撞风险进行深入研究,从而提出1种具有普适性的碰撞风险评估模型。
2)根据2架无人机之间的相对运动过程对无人机碰撞风险进行评估,若有多架无人机同时运行在空域内,则需要进行多对多的碰撞风险评估,故未来需要从无人机运行数量上对模型进行改进,从而适用于多无人机的碰撞风险评估。
3)针对无人机避碰解脱方式和解脱路径的研究较为单一,需要研究航向、速度解脱等不同的解脱方式和路径对碰撞风险的影响,从而使模型更加合理。
4 结束语
1)以无人机运行在低空空域为背景,建立无人机之间的碰撞风险模型,该模型建立了双碰撞模板,并为模板设置了避险层,更加贴合无人机在低空空域运动方向随机和避让机动性大的运行特点,并考虑了无人机定位误差、速度误差、人机系统的影响,利用可靠性理论量化分析了各影响因素,增加了碰撞风险计算结果的准确性。
2)通过假设某低空空域参数,利用模型计算得到了该空域内碰撞风险与无人机密度的关系,结果表示该空域内满足运行安全要求的无人机M600最大密度为4.2架/km3,无人机M300最大密度为5.0架/km3,较载人机碰撞风险模型计算结果分别提高了106.9%和88.7%,通过对比分析可知本文模型可以有效提高空域利用率和无人机运行效率。
为了使模型更加准确且接近实际情况,下一步将研究无人机运行模式、数量、解脱方式及路径对碰撞风险的影响。
