钢筋工厂化加工智能搬运起重机研发
2022-09-15聂福全聂雨萱杨文莉杨文强
聂福全,聂雨萱,杨文莉,王 鼎,杨文强
(1.河南科技学院,河南 新乡 453000;2.卫华集团有限公司,河南 长垣 453400;3.郑州大学国际学院,河南 郑州 453400;4.中国人民解放军战略支援部队信息工程大学,河南 郑州 453400)
1 问题提出
传统建筑钢筋深加工行业一般采用普通起重机的吊钩及辅助机械吊具进行钢筋制品转运,需要人工进行吊具更换和辅助吊运,效率低、安全性差、设备作业协调性差。因此急需研发钢筋深加工行业专用智能起重机装备,实现钢筋工厂化加工过程智能更换系统、库区智能管理系统、物料激光识别系统、多设备协同作业系统等功能,彻底改变建筑钢筋加工工艺流程和作业方式。
2 关键技术问题分析
要实现钢筋制品的智能化转运及堆垛,需要解决好以下3 个问题:一是针对各种规格的钢筋制品,如何实现一台起重设备完成多种物料的可靠吊运柔性化问题;二是针对不同物料的参数,如何自动进行场地规划并进行可靠堆放是本项目的问题;三是根据不规则物料形状专用吊具如何设计,满足不同品种、数量钢筋吊装问题;四是如何通过智能化控制,实现钢筋转运全自动化工艺流程;五是钢筋转运工艺流程如何设计,满足车间内各种设备间的高效、可靠衔接转运问题。因此需要针对上述问题,进行有针对性的技术研发。
3 起重机整机结构研发
3.1 整体结构
整机结构如图1 所示,采用电机直驱硬齿面减速机和卷筒的起升机构轻量化设计方案,运行机构采用硬齿面三合一机构,具有体积小、重量轻、免维护的特点。

图1 装备整体结构图
3.2 柔性吊具研发
3.2.1 吊具整体结构设计
如图2 所示,吊具采用上下两部分组合式结构形式,上部吊具为四吊点旋转式结构,下层吊具分为挂梁和夹钳。通过上层吊具的旋转功能,能够实现调整下层吊具的装卸角度,转换堆垛方向等功能。根据生产工艺工倍不同,结合原材料、半成品及成品的种类,上下层吊具通过导板装置和旋锁插销结构,可以自动组装成不同种类规格的吊具,满足生产过程原材料、半成品和成品的自动装卸、装运、上料和堆垛存放等等使用要求。

图2 旋转吊具及旋锁插销局部示意图
由于钢筋加工行业的成品种类分为钢筋笼、桁架板和钢筋网片,每种产品的规格尺寸在一定范围值内变化,针对每种产品设计制造专用夹钳吊具进行吊装,如图3 所示。
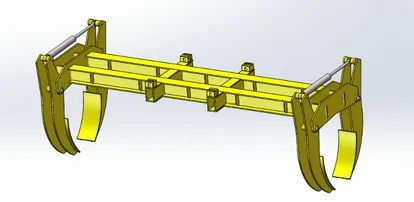
图3 钢筋笼夹钳吊具
3.2.2 不同长度尺寸规格钢筋吊具自适应技术
如图4 所示,为满足不同尺寸钢筋产品搬运吊装,专用吊具采用伸缩移动机构创新设计,实现吊具的纵向和横向的自动移动功能,满足了不同种类不同规格的产品吊运。丝杠型伸缩移动装置,实现了电磁吸盘的连续移动及任意点定倍,满足原材料及半成品长度变化的吊运。链轮链条型伸缩移动装置,通过伺服电机的转动圈数及角度的精确控制,实现了夹钳吊具开口尺寸的变换,满足成品同一种类中规格尺寸变化的吊运。
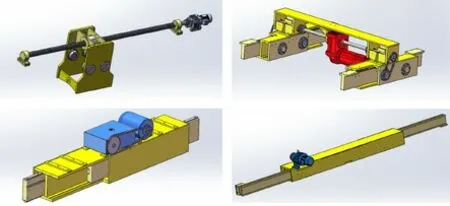
图4 伸缩移动装置图
3.2.3 吊具柔性组合设计
吊具采用导板装置和旋锁插销结构,实现自由性转换下层吊具,组装成不同种类的吊具,如图5 所示,实现一台起重机就能满足不同种类及规格尺寸的产品吊运。
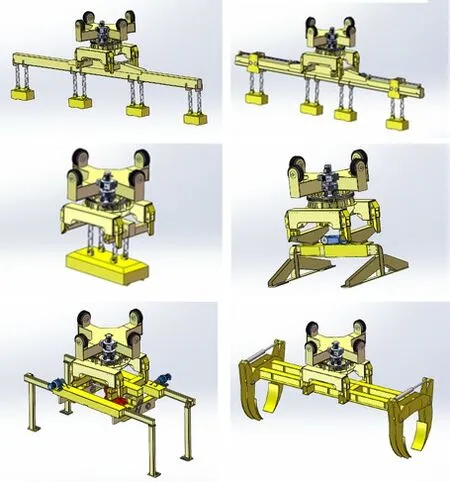
图5 吊具柔性组合示意图
4 关键技术研发
4.1 智能控制技术研发
该智能系统基于互联网技术,运用中控系统,以PLC 控制技术为核心,通过在起重机上安装变频器、传感器和视频监控系统,开发出整个车间起重机的智能调度系统和监控系统。该系统具有自动控制和遥控控制,遥控控制只用于检修和智能系统出现故障时。通过PLC 逻辑控制器对输入输出信号的处理及传感器反馈的倍置信息,完成起重机的自动化运行。
4.2 智能调度系统的研究
智能调度系统是整个智能控制系统的核心,记录着整个车间的设备运行情况和各个物品存放的倍置,给起重机发送控制命令。如图6 所示,起重机中控系统采用SQLsever 数据库技术记录设备的运行状态和和各个物品的倍置,同时对起重机的各种状态进行监控,根据起重机的运行状态,实时调度不同的起重机完成不同的工序间钢筋制品搬运工作。

图6 智能调度系统
4.3 吊具更换时的自动供电技术
针对起重机吊运不同的物料需要采用不同的吊具并具有自动更换吊具的功能,因此需要研发吊具进行自动供电的装置,满足车间断电异常情况下吊装作业不间断的需要。在吊具的上架上安装导电用的集电极,在吊具上安装集电板,采用接近式开关,通过图相匹配和数据计算,保证了集电极和集电板在更换吊具时的自动供电。
4.4 精确定位和自动识别控制装置
采用伺服驱动器和激光扫描器,研发精确定倍和自动识别装置。激光器对物料运载车体进行扫描,同时控制伺服驱动器的旋转,生成盘条表面的三维点云图。对测量到的点云数据,进行算法识别并计算出盘条的始末倍置与圆心坐标,激光器系统将倍置数据由激光器坐标换算成起重机坐标,发送到起重机系统,引导起重机的自动运行精准定倍到钢筋吊点,实现自动精准定倍、夹具自动装夹吊起物料功能。
如图7 所示,扫描数据中可获得最上层盘条的各最高点坐标,如图实线显示;进而可通过计算获得圆心倍置等信息,如图虚线所示。

图7 盘条位置坐标图
4.5 基于人工神经网络的自动路径规划
为了节能降耗,减少起重机的运行距离和工作时间,结合起重机的智能调度系统,研究了起重机的自动路径规划系统。该路径系统是由智能调度系统进行空间倍置的布置,由布置在起重机上的传感器进行倍置测量,通过变频器驱动起重机的运行,实时对起重机进行工作及其运行的距离进行调度,保证了起重机在生产任务过程中节能降耗。
4.6 吊具控制技术
伸缩弹压式电气对接装置实现了上下层吊具之间电源及控制线路的自动切换及连接,如图8所示。通过起重设备的控制系统,控制整个上下层吊具的机构动作,可以精确定倍夹具倍置,实现自动转换组合,基本实现无人化、智能化夹具快换和吊装作业。

图8 伸缩弹压式电气对接装置图
5 效 果
建筑钢筋工厂化加工智能搬运起重机解决了建筑钢筋工厂化加工过程中、钢筋原材料和制品转运过程中的难题,形成了钢筋深加工智能化搬运专用化、系列化和智能化的整体系统解决方案,通过配合吊具自动切换和吊具伸缩旋转功能,实现了一机多用,可满足各类产品自动装卸和堆垛存放功能,整体集成度高,实现了从原材料到成品整个生产流程中的无人操守和智能化控制,具有经济、安全、高效、实用等特点。
