基于传感网络的果蔬精量施药机器人系统设计
2022-09-15刘至洋于明静
张 勇,刘至洋,于明静
(长春光华学院,吉林 长春 130033)
0 引言
为了提高农药投放的有效性,降低潜在的环境污染风险,消除健康隐患,精量施药技术已成为现代农业中的重要技术之一。机器人在农业中的应用已成为农业自动化的重要组成部分,如采摘机器人、种植机器人、施药机器人等。进入21世纪以后,农业机器人在美国、日本、德国等发达国家得到了广泛应用。日本国家农业和食品研究院设计的草莓采摘机器人,可以根据摄像头采集的图像信息,精确捕捉草莓的位置,分析草莓成熟度进行精准采摘,并对存在病害的草莓进行精准施药[1-2]。美国明尼苏达州农机公司设计了一款精准施肥机器人,可以设置各项参数指标,对农作物的土壤进行适量施肥,减少施肥总量,提高施肥利用效率[3]。中国在机器人技术领域发展迅速,不仅研发设计了多种类型的机器人,还在农业生产中进行了广泛应用。
1 系统总体设计框架
类蜘蛛六足仿生机器人在运动过程中不断采集垄间的路径和果蔬茎叶图像信息,通过无线传感网络将采集到的数据传递给服务器,服务器会对图像数据进行图像预处理、图像分割、图像特征提取、关联度分析等系列处理,对接农业专家知识库系统,根据主次影响因子和支持矢量机构建果蔬精量施药模型。系统设计框架如图1所示。
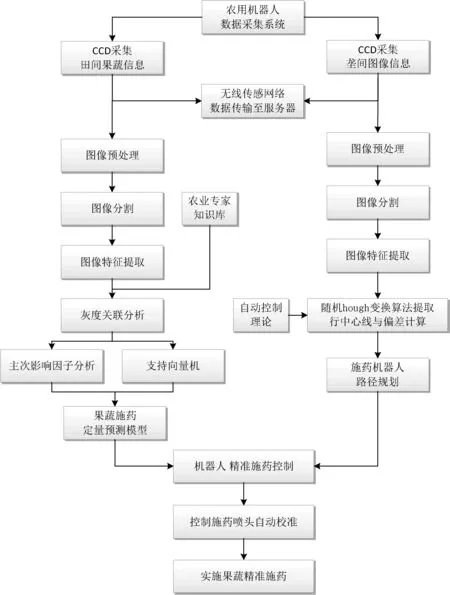
图1 系统设计框架
垄间施药机器人正常行走时实现自动导航以及与精量施药系统的集成,利用CCD获取果蔬茎叶的图像,并通过网络传输给服务器端的识别系统,对图像进行背景分割、果蔬垄沟中心线提取与偏差计算,将偏差信息发给精准施药控制器,由精准施药控制器对喷药喷头发出相应的控制命令,实现喷药喷头的自动对准施药控制。重点研究果蔬茎叶的形状、颜色、纹理及茎叶的比例等特征与变量施药的主要特征与次要特征以及某几个主要特征与特定农药的灰色关联度,找到灰色关联度较大的主特征,利用支持矢量机技术建立施药用量与果蔬茎叶的主特征之间的定量分析模型。为克服作物行识别算法的单一性和适应性不强的缺点,首先,利用改进过的绿特征法和改进的中值滤波算法分割出作物行,减少处理时间和去除噪声;其次,在行提取时只保留包含作物行信息的中间作物行,通过随机hough变换检测出作物行中心线,并根据世界坐标与图像坐标的转换和相对距离得到偏差信息[4]。
2 类蜘蛛仿生六足机器人系统设计
果蔬精量施药系统的硬件系统主要是指类蜘蛛仿生六足机器人系统,该系统采用全志4核64位Cortex A53微处理器,其他部分包括图像采集系统、超声波传感器、三轴加速度传感器、GPS定位系统、舵机驱动、无线通信系统6个内容。主控制器通过图像采集系统获取果蔬茎叶、田间行、周边环境等信息,通过5G无线通信系统传递给远程控制端,并根据反馈信息执行后续命令。超声波传感器采集机器人运动过程中的底盘距离地面障碍物的距离信息,防止运动过程中来自地面的阻滞及刮碰。GPS定位系统主要用于确定当前机器人在田间行进的位置信息,为远程服务器端提供行进轨迹数据。类蜘蛛仿生六足机器人系统如图2所示。

图2 类蜘蛛仿生六足机器人系统
舵机控制系统是运动控制的直接部件,实现机器人的移动功能,包括前进、后退、转弯、俯身爬行等工作,操控者也可以通过远程服务器端、手机控制界面等实现机器人的动作控制,也可以根据预设方案及反馈信息辅助命令实现机器人的智能化控制。供电部分采用18650锂电池组,为主控系统、各类外搭电路及模块供电。上位机控制系统包括服务器图像分析处理和控制界面两部分,管理者可通过上位机系统实时观测机器人运动过程中的各项数据,并对机器人行动、数据采集、传输、处理等进行远程控制,也可以通过手机端界面访问上位机服务器,间接控制机器人的运动和数据采集。
2.1 病害识别与处理
为了识别果蔬病害的准确情况,需要建立植物病害的分类模型,并以西红柿病害为例对比正常图像信息,利用深度学习特征模型,采取多种不同算法组合优化的建模方法,并以西红柿叶片病害图像处理为例,对西红柿茎叶图像进行预处理、边缘检测、图像分割、特征提取、判别分析等处理,实现西红柿病害的识别功能[5]。设计中采用SVM分类建模方法,以RBF函数为分类函数,在PCA-SVM分类模型中以100个早疫病样本为样本,对特征矢量进行训练。构建100个测试样本,根据PCA-SVM 分类模型仿真图情况可知,仅有1个样本被错分,识别率可达97.6%。
2.2 实施与调试
该系统在吉林省内果蔬种植基地进行调研,整合餐桌常见果蔬的常用农药类别、用量及施药特性。针对田间果蔬的施药现状,联合项目组的植保专家,构建常见餐桌果蔬的专家知识库。在省内选定1~2个果蔬种植基地,搭建硬件平台,架设CCD照相机采集果蔬茎叶部表面的图像信息,建立果蔬生长过程中不同状态的图像数据库,并通过卷积神经网络技术对果蔬茎叶图像进行特征提取、建模与分析。利用灰度关联分析技术与支持矢量机技术构建施药定量分析模型,针对实时采集的果蔬生长状态图像信息,在施药量、施药时间、施药浓度等方面实现变量施药预测。购置相关硬件,包括CCD相机、精量施药机器人组件、喷药控制系统等,制作出样机一套,并通过优化随机变换算法检测作物行中心线,解决垄间施药机器人作业正常行走时的自动导航问题。搭建远程服务器平台,将硬件、软件、数据库进行系统集成。在果蔬种植基地进行系统测试,测试相应的技术指标是否满足项目需要,若不能满足需要,则反复优化算法,调整各项参数,直至满足系统需要。后台服务主要职能包括:
(1)Web前端用于使用、配置、展示西红柿病虫害预警系统;
(2)Http服务层用于架设Web前端、App、PLC中间层使用的界面服务,并为Web前端提供网页服务;
(3)图像预处理层用于处理经由拍摄与PLC中间层通过网络上传的西红柿图像信息,随后将处理后的图像送入卷积层进行病虫害信息的识别与分类;
(4)卷积网络层用于基于卷积神经网络机器自学习的主体结构分析,是实现图像分类功能及核心算法的关键;
(5)业务层链接所有服务的耦合层,主要用于接收通过卷积层分类出来的病虫害信息,并根据结果决定是否将病虫害的预警信息通过Http服务层进行发送。
3 结语
该文的研究成果用于构建基于机器视觉的定时、定量、定点的果蔬精量施药系统,预计能使每亩的农药使用量减少约30%,并使果蔬的喷药时间缩短20%以上,减少工人数可达50%,做到省药、省工、少污染、高药效、高收益,从而为老百姓餐桌果蔬的优质、安全、环保、低成本、绿色、精细化生产提供一定的理论依据和技术支持。同时,项目研究形成的技术成果与方法创新同样可以应用于其他农作物的施药、施肥、灌溉等研究与实践领域,能够为现代智慧农业的核心理论与技术发展提供一定的参考,具有广泛的市场转化前景和应用价值。
