论海洋石油平台起重机操作控制技术
——起重机操作控制
2022-09-14陈安顺
陈安顺
中海石油(中国)有限公司深圳分公司 广东 深圳 518067
1 海洋石油平台起重机的基本特性
海洋石油平台起重机是桁架式吊臂、独立圆形钢柱(俗称将军柱)固定于设施上的基座吊。吊机上车体可360°左右回转,在吊臂的幅度范围内作升降、水平移动的功能。由于受到外部风力、船体摇摆力使回转受到干扰,操作危险性增大。了解吊机基本结构与回转系统原理,为操作控制打好坚实基础。
1.1 起重机结构基本概况
起重机基本结构由金属结构、工作机构、控制系统为主体组成,金属结构主体是吊车主要支撑作用,由控制系统控制吊车三大工作机构运行,在一定幅度范围内垂直起升、变幅、水平移动来实现起重功能为目的,共同组成了起重机的基本构造。①起重机主体金属结构由起重机下车体、上车体构成。起重机下车体是一根圆形钢柱(俗称将军柱)固定船舶或平台上,将回转大齿轮固定在圆柱端口面上,组成回转基座。圆形钢柱体是支撑吊机上车体回转的主要结构,他固定于船体甲板,倾翻安全系数高于移动式起重机。②工作机构系统部分都置于在上车体,包括起升机构、变幅机构、回转机构。液压系统主回路、控制回路组成。液压系统由主回路、控制回路组成。主回路上由液压油泵、马达、换向阀、溢流阀、液压管线等组成,形成对各工作机构运行的主要回路。
1.2 回转控制功能
回转系统由液压油泵输出动力源传递给液压马达旋转,通过减速箱驱动小齿轮转动,液控换向阀实现回转换向功能。①回转刹车的种类分常开式、常闭式和机械锁定装置等几种。常开式回转刹车是长期处于打开式状态,根据作业需要手或脚来控制刹车开关。常闭式回转刹车,即操作回转时,刹车控制回路得压,刹车片打开。当手柄回零位,控制油压失压,即刹车停止。②常开式刹车作用可用来动态定位,作业短时或长时的制动,是在回转动态状态下刹车,停车惯性小。③常闭式刹车是回转转动停止,消压即刹车闭合,可短时间暂停,动作灵敏,容易引起刹车过急,没有缓冲量,停车惯性较大。
2 起重机操作控制技术
根据海洋石油平台起重机的特点和对海洋的特殊环境,并经过多年的工作实践经验,在运用操作技术、技能方面进行了总结归纳,操作过程中得到有效控制,确保起重机的安全运行。
2.1 起重机结构对吊车稳定性的影响因素
起重机的工况配置对作业环境有一定的要求,是影响操作控制的重要因素,海上作业环境要求对它要求更高,在系统控制原理、吊车性能上更要合理配置。
2.1.1 起重吊机结构配置对吊车的稳定性产生一定的影响。
2.1.1.1 吊臂长度的影响。①起重吊机的吊臂越长幅度范围越大,对回转稳定性越不利。②在倾角越小时,即使不吊载荷,力矩变小,回转稳定性会越差。③吊重时吊臂会产生挠性,使实际的工作幅度偏差,起升力矩也随之波动,过大的冲击力使得回转稳定性变差。
2.1.1.2 吊臂受重物摆动影响,起重吊机在回转时会产生离心力,使重物内外抛移。①重物向外抛移(相当于斜拉)时,通过起升钢丝绳使吊臂端部承受水平力的作用,从而增大起重力矩,不利回转控制。②使用吊臂越长时,起重机操纵回转时受外界影响过大,要特别慎重,吊臂端部的速度和离心力都很大,力矩增大危险性变得越大。
2.1.2 起重设备外部因素对控制因果关系。
2.1.2.1 吊臂受到风力的影响最大,回转停止刹车困难[1]。①工作状态最大风力,一般规定在30节风速时应根据作业任务或司机的操作控制情况来决定应当停止作业。当风速大于35节的速度时必须停止作业。②受顺风影响停车时会顺着方向滑动,反向来风停车时会向相反方向滑动。③对于大型吊臂,风力的作用很大,如表1可以看出随着臂长和风速的增加,风载力矩增加很快,风力对吊车回转的影响越大(如表1)。
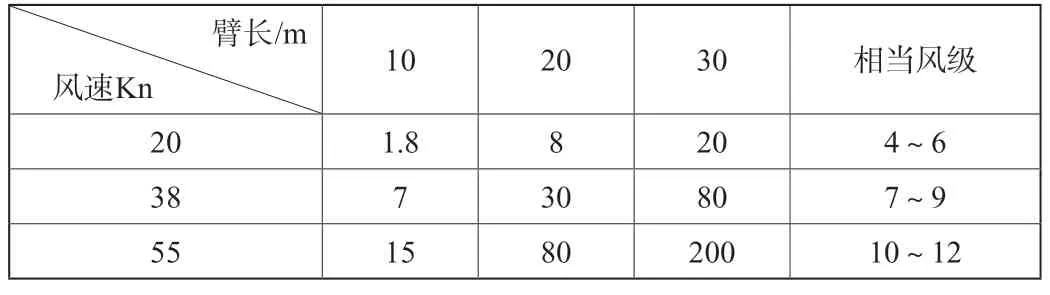
表1 臂长、风速、风载力矩关系表(单位:kN/m)
2.1.2.2 吊臂受到船舶摇摆会使得自由摆动。①船舶横向1度与纵向摇摆0.5度时,吊车回转受到重心偏移出现前后、左右摆动,横向超过2度时就难以控制,3度时就必须停止作业。②当船舶摇摆起重机倾斜1°时起重能力要下降7.4%;倾斜2°时,降低14.3%;倾斜3°时,降低19.8%;中心偏移力矩变小,扭矩增大,危险性增大。③在任何急速动态回转时,停车制动与反车制动都容易损坏设备引起事故。
2.2 操作回转刹车制动不利因素
①回转制动是当确认回转自动平稳停止后所采取的人工手动操作刹车。如果是利用常闭刹车按钮,增加手动操作,需时间等待回转自动停稳的状态下才能执行此操作,在时机上很难控制。②现场风力大较大,船舶摇摆使回转滑行速度加快,不能立即刹车,难以等待起重机回转自动停稳想要的中心位置。③如遇时机紧迫,驾驶员就会利用反车制动,这时就会由于滑行速度过快,而突然受相反方向冲击力的影响,造成设备回转齿轮、减速箱、液压马达严重的磨损或损坏。④手动刹不利因素。回转手刹系统,在其他机构都停止动作时,才能单独手摇制动。泵油有一个时间过程,而且还要在合适的机会,操作极其不便,协同配合较难。
2.3 回转控制系统工作原理
根据回转刹车的结构及原理,由脚踏比例控制阀与单向节流阀调节刹车速度,使回转脚踏刹车能够灵活配合其他机构完成操作。
2.3.1 刹车控制回路工作原理:液压控制系统压力350psi,提供回转刹车系统260psi的工作压力。使用脚控刹车比例控制阀及节流阀导通,梭阀自动关闭手控刹车,回转刹车停止,松开脚控刹车,压力回零刹车打开。使用手刹拉动手摇泵,手动刹车回路导通,梭阀关闭脚踏刹车回路,回转刹车停止,松开手摇泵,压力回零刹车打开。
2.3.2 脚控刹车操作程序:在转动操作停止,回转还在滑行时,通过比例减压控制刹车速度,观察压力表读数值判断刹车系统压力变化。
2.3.3 动态稳定性是起重机主要考虑的方式,当回转滑动速度过快时,以动态刹车方式把速度控制在合理范围内。在指定某位置时能平稳停止制动,减少吊机的惯性冲击力。
2.4 回转动态刹车操作控制技术
由于风力、摇摆力的影响,回转刹车难以控制。回转刹车过急使货物摆动幅度大难以控制,过慢会错过机会,打反车时容易磨损或损坏设备,货物受惯性摆动过大。回转刹车系统的可操作性将直接影响起重机司机安全操作水平[2]。
2.4.1 提升操作技能水平,有效缓解驾驶员的精神压力。利用脚动控制回转动态刹车,从效果上便利于驾驶员控制,要求驾驶员一定要精通技术原理,掌握操作方法,熟练协同配合。
2.4.2 回转动态刹车起到了安全、高效的作用,在惯性力、风力、油轮摇摆力作用下使回转自由转动,通过回转动态脚刹控制速度,不再间接性打反车,提升设备安全可靠性。驾驶员操作精、准、稳,减少作业时间,提高工作效率。
2.4.3 操作程序简单,可操作性强。除了起重机自重和载重之外,还需要考虑风力、惯性力、离心力和油轮摇摆力的影响。回转动态刹车控制对起重机的稳定性起到重要的作用,掌握时机精准,减少手动控制负担,保证制动方便、快捷,有力保障回转控制操作。
2.5 稳钩控制技术
稳钩是实际操作的重要基本技能之一,是完成每一个吊运工作循环中必不可少的工作环节。所谓稳钩,就是使摇摆着的吊钩,平稳地停在所需要的位置,或使吊钩随起重机平稳运行的操作方法。
2.5.1 吊钩摆动的因素分析。物:吊物重量,体积大小,形状规格;设备:控制有动作滞后性,机械速度,稳定性;人:心理素质,时效性;环境:风力,海况,作业空间。
2.5.2 稳钩技能要领。三点两式:三点即定滑轮、钩头、船体重心两式——回转、变幅;接点控制:左右、前后、上中下;精准发力:速度控制、方向正确;回转操作与动态脚踏刹车协同配合,掌握时机精准;果断操作:及时性、连贯性;准确判断货物摆动方向,利用动态制动的方式追钩、稳钩,使吊装在合理的操控之中。
2.5.3 稳钩操作控制。
①乘胜追钩法:吊钩来回摆动时:利用回转或者变幅来追钩。如果一次追钩未能完全消除摇摆,可重复动作,直到完全消除摆动为止。②迂回制胜法:当吊物摆幅过大时,待吊物回摆时向相反方向跟车到吊物与中心垂直相交。③先后顺序法:当摆动成三点式时,先稳上部,再下部,直到三点在一条线上,再重复乘胜追钩法操作。④双向同步法:吊物打圈晃动时,操作回转左右转动、同时前后变幅进行追钩,可参照乘胜追钩法、迂回制胜法步骤动作要领。⑤甲板止荡法:在起吊或就位前,吊物有轻微偏离垂直中心时,可以利用甲板或支撑物之间的摩擦,进行自由找中法。⑥动态起吊法:在守护船上起吊时,可根据守护船动态规律,在船体起浮时相向起吊,船体下沉时相向落钩,保持与吊物垂直中心,防止船体摇摆重心偏离拉拽。
2.5.4 稳钩操作技术起到了安全、高效的作用。根据起重机的工作特点,货物的形状大小、起重量等因素,经常从静止到快速运动,由快速运动到制动停止。因此,吊物因惯性存在而产生摇摆是客观存在,吊物摇摆的情况千变万化。需要采取哪种方式行稳钩,要根据具体情况,因时、地制宜,综合采用稳钩方法,这对稳钩操作的效果和技术的发挥有着十分重要的意义。驾驶员操作精、准、稳,减少作业时间,提高工作效率。
3 起重机安全操作要领
良好的操作术必须精心掌握所操作吊车设备的工作原理、结构、性能和参数,以及作业时物的属性特点和作业工艺流程等关键性要素应知应会,细心把握设备的状态变化。海洋石油平台起重机是特种设备,设备操作要确保吊车的技术状态和完好状态,在起重机运行过程中,受到作业条件和环境等因素的限制影响,设备运行状态可能会由于吊装作业发生变化而使工作性能下降,这就必须对设备维护保养到位,认真做到“十字”(清理、清洁、润滑、调整、紧固)作业法,及时处理随时发生的各种故障问题,改善设备运行条件,防患于未然[3]。充分理解海上吊装作业的特殊性,掌握海上吊装的特殊技能,海上吊装由于海况的影响,一般情况下,供应船和平台或FPSO都处于摇摆状态,这就要求吊车操作者利用经验通过观察海浪动态情况,抓住时机果断操作,保证吊装作业必须在相对稳定的状态下完成。
设备的异常现象可通过人体第一感官来监控设备:“视”就是用视觉观察以期发生直观的缺陷和故障;“听”就是依靠听觉感观发现设备运行状态、声音的不同变化就能判断故障的大概部位;“闻”就是依靠嗅觉检测设备状态,各种油路的泄漏、安全电磁阀门线圈以及电路发生过热短路发出刺鼻异味;“触”就是通过手感诊断设备的异常状态,“觉”就是指感觉或感受,操作时会感受到来自各方面的信息,经验告诉你,哪些正常哪些不正常,当感觉与平时不一样时,要立刻追根溯源,一查到底。
起重吊机在运行过程中出现故障或一旦失控时,吊机司机应正确判断紧急状态的特性并采取得当的应急处置措施,防止措施不当造成恶性循环,在危险状态下一定要沉着冷静、化险为夷或尽可能把事故损失降到最低,比如在吊机摇摆幅度过大时起升货物,最易造成钢丝绳出槽,在发现吊货上下不通畅出现异常跳动的现象时,要立即停止起降操作;在情况允许时可放稳货物后停车查看,防止钢丝绳被卡,卷扬上的钢丝绳松乱,如不及时发现处理,最终会导致钢丝绳被卡拉断后货物坠落的重大事故发生;作业过程中安全限位器失效,在做每一个动作时都要确认是否吊车运行状态与操作时的一致性,如超过极限时要及时查证原因并修正保持在正常工况工作。起吊过程中由于船舶摇摆造成所吊货物摇摆过大,不能安全放在甲板上时,应急情况下可以把货物放到水中,稳定后再进行下一步吊装作业等等。
