环境风速对六旋翼无人机下洗气流和雾滴沉积影响研究
2022-09-14周宏平杨风波
张 健 张 超 陈 青 周宏平 杨风波 茹 煜
(1.南京林业大学林业资源高效加工利用协同创新中心, 南京 210037; 2.南京林业大学机械电子工程学院, 南京 210037)
0 引言
近年来,我国农作物病虫害发生次数和有害生物种类逐年增加[1],传统的植保机械已经无法应对这些问题[2],植保无人机凭借其不受地理条件约束和精确高效完成病虫害防治等优点,成为植保作业的重要手段[3]。相比固定翼飞机和轻型直升机,小型多旋翼植保无人机灵活性好,无需专门起降场地,能够实现低空施药作业,具有工作效率高、作业效果好、农药利用率高、中毒率低等优点[4]。
植保无人机通过地面人员遥控或飞控自主作业来实现植保作业,可以完成农药喷雾作业、叶面肥喷雾作业、促进授粉作业等农业作业[5]。目前,小型旋翼植保无人机在我国丘陵、山地、平原等地域有广阔的应用前景[6-7],市场潜力大,国内外学者对旋翼植保无人机的下洗风场、雾滴沉积等进行了研究[8-12]。CROWE等[13]和LEE[14]利用水雾和彩色烟雾显示载体,获得无人直升机风场形态和翼尖涡的轨迹;张京等[15]利用WPH642型无人机搭载红外热像仪,研究了无人驾驶直升机航空喷雾参数对药液雾滴沉积效果的影响。目前试验法存在成本高、耗费人力大、测量过程复杂等缺点,计算流体力学方法(CFD)在植保无人机施药研究中成为一种越来越重要的手段。陈明[16]利用CFD方法分别研究了孤立螺旋桨和四旋翼植保无人机的气动特性,得到了相关的气动特性参数;张宋超等[17]利用CFD方法对N-3型无人直升机风场和喷雾场进行了模拟,研究侧向风速对液滴飘移方向和飘移量的影响。目前国内外学者主要在理想情况下,对植保无人机施药进行初步探索,对于耦合风场和喷雾场,环境风速对多旋翼植保无人机施药的影响研究报道较少。
为探析小型六旋翼植保无人机飞行作业时,环境风速对下洗风场和喷雾场的影响,本文采用RANS方程、SSTk-ω湍流模型和SIMPLE算法,对小型六旋翼植保无人机进行几何和物理建模,并对耦合下洗风场和雾滴颗粒的两相流场进行数值模拟计算。结合机身下方空间点风速测试和末速度验证数值计算的准确性,研究来流和侧风对小型六旋翼植保无人机下洗风场的影响,探析喷嘴布置和来流对雾滴沉积和运动轨迹的影响规律,为进一步分析多旋翼植保无人机耦合风场和雾滴场对喷雾沉积运动规律的影响提供基础。
1 小型多旋翼植保无人机工作原理及数值模型
1.1 小型多旋翼植保无人机工作原理及结构简化
近年来小型多旋翼无人机在农业应用中越来越广泛,本文以应用最广泛的六旋翼植保无人机为研究对象。六旋翼运动系统如图1所示,图1中OeXeYeZe为绝对坐标系,ObXbYbZb为六旋翼无人机自身相对坐标系,f1、f2、f3、f4、f5、f6分别表示6个旋翼的升力。六旋翼无人机6个旋翼呈60°均匀布置,相邻旋翼转速相同,转向相反,平衡旋翼产生的反扭矩[18]。六旋翼植保无人机下洗气流和雾滴分布与旋翼系统气动布局紧密相关[19],本文研究环境风速对六旋翼植保无人机下洗气流和雾滴沉积的影响。
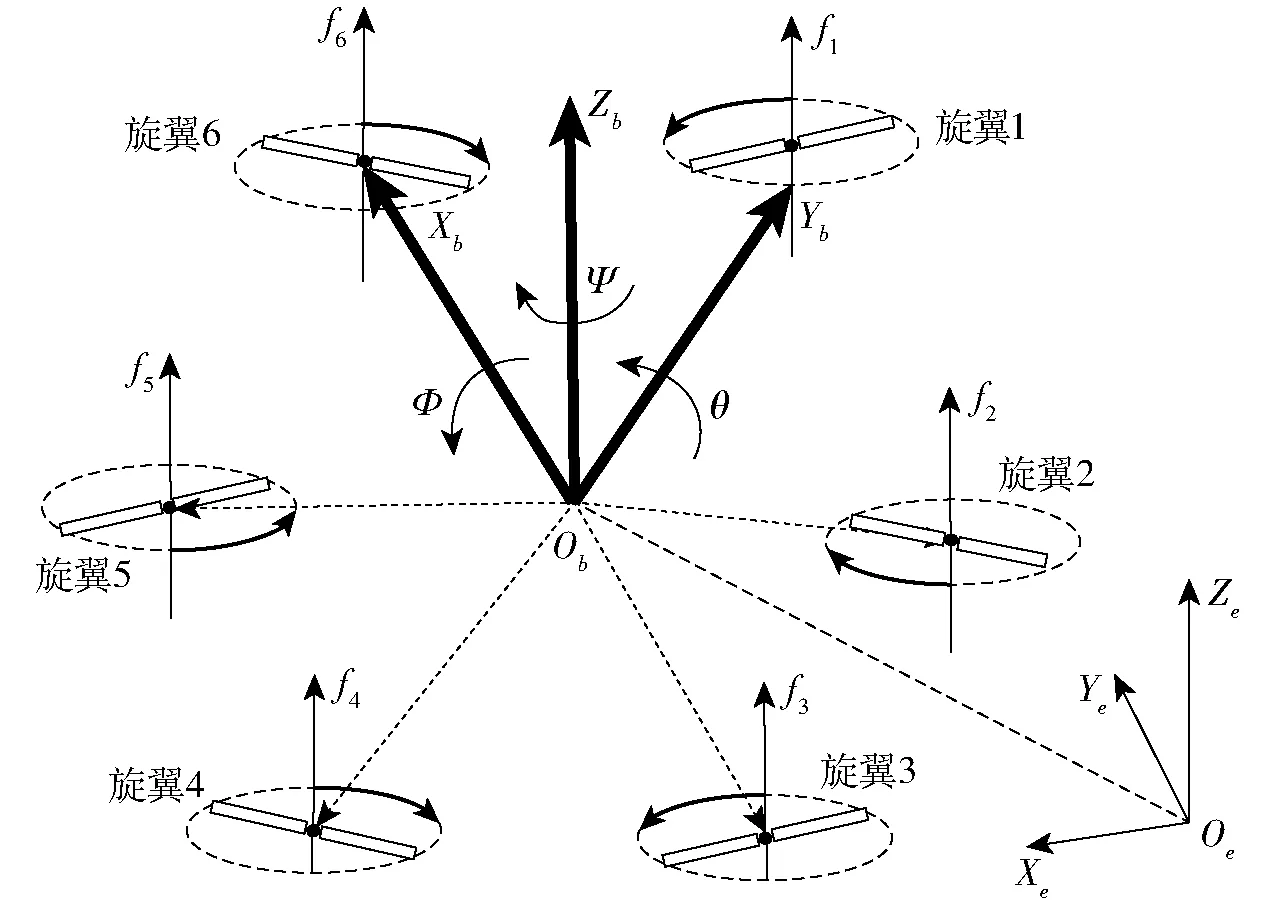
图1 六旋翼运动系统示意图Fig.1 Schematic of six-rotor system motion system
小型六旋翼植保无人机三维建模结构复杂,本文对无人机模型进行结构简化,省略对无人机下洗风场影响很小的旋翼连接件和大量的不规则曲线,简化后的模型主要由机身和旋翼组成,小型六旋翼植保无人机的主要技术参数为:六旋翼无人机机臂长度533 mm、旋翼半径207 mm、桨叶负扭角0°、旋翼最高转速3 600 r/min、桨叶迎角6°。
1.2 计算区域网格划分与边界条件
由于求解无人机下洗风场时存在旋翼的转动,为保证数值模拟的求解精度,采用多参考系模型进行求解计算。总计算区域为8 m×8 m×4.5 m的长方体,如图2所示,包括静域和动域两部分。静域包含远场静域和无人机悬停状态下除旋翼外的其他部件,动域为包含所有旋翼的6个直径480 mm、高48 mm的圆柱体,此时旋翼距离地面高度为2 m。采用ICEM CFD将计算区域自下而上划分为非结构网格,为提高计算精度,对无人机旋翼处的动域网格进行加密处理,模拟总网格数量为3 877 580,其中动域网格数量为2 622 122,静域网格数量为1 255 458,网格质量评价参数最小正交质量和最大正交斜率分别为0.260 89和0.625 98,符合网格质量要求。
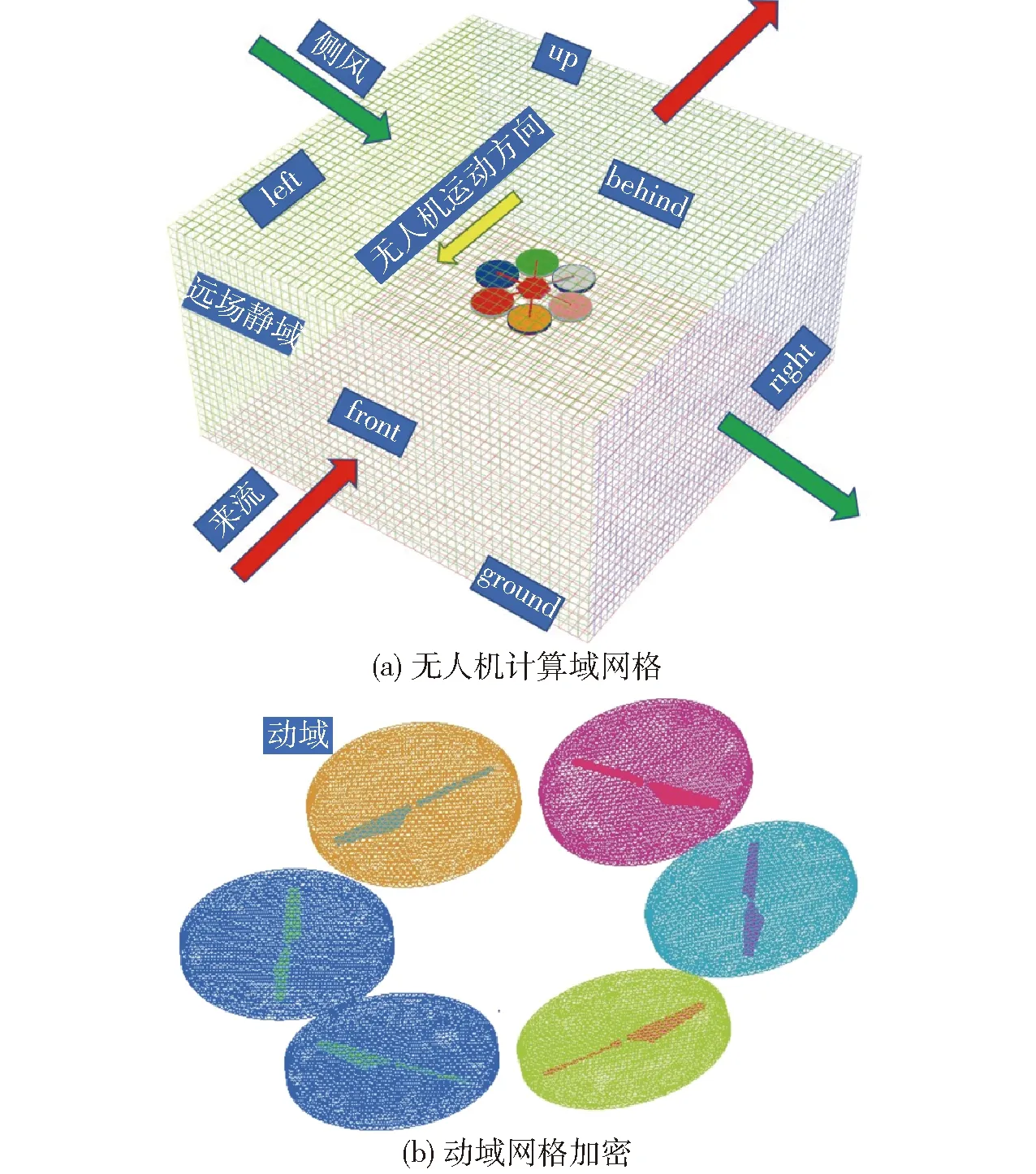
图2 计算区域网格划分Fig.2 Griddings of calculation domain
六旋翼植保无人机数值模型的边界条件设置如下:①远场静域的底面ground设置为wall,且固体面上的速度为无滑移边界条件。②当无环境风速影响时,远场静域四周设置为pressure-outlet且压力为0;当无人机受来流影响时,远场静域front面设置为velocity-inlet,速度由无人机和来流的相对速度决定,left、right、behind 3个面均设置为pressure-outlet且压力为0;当无人机受侧风影响时,远场静域left面设置为velocity-inlet,速度由侧风速度决定,front、behind、right 3个面均设置为pressure-outlet且压力为0。③远场静域的入口up设置为velocity-inlet,由于六旋翼无人机模型距入口2.5 m,入口面对无人机下洗风场影响很小,为简化计算模型,远场静域入口速度设置为0。④无人机6个旋翼和机架部分均设置为wall,且固体面上的速度为无滑移边界条件。
1.3 数值计算方法
小型六旋翼植保无人机旋翼流场采用RANS作为基本控制方程,对于单个旋翼,将旋转坐标系的坐标轴固连在旋翼上,其守恒积分控制方程具体可表示为[20]

(1)
其中
式中W——守恒变量
F(W)——无粘通量
G(W)——粘性通量
S——控制单元表面积,m2
Q——旋转通量
V——控制单元体积,m3
ρ——流体密度,kg/m3
u、v、w——流体速度的3个分量,m/s
E——单位流体内能,J/(kg·K)
H——流体总焓
p——流体压强,Pa
qn——流体速度沿网格面法向的分量
qb——网格运动速度沿网格面法向的分量
nx、ny、nz——控制体外法矢量的3个分量
τxx、τyy、τzz、τxy、τxz、τyz——粘性通量G(W)粘性力τ的各分量
Φx、Φy、Φz——粘性项
t——时间,s
Ω——旋翼旋转角速度矢量,m/s
小型六旋翼植保无人机的喷雾场中,雾滴在下洗风场中除了受重力影响,还受到风场多种作用力,包括粘性力、惯性力等。雾滴离散相运动方程采用欧拉-拉格朗日方法求解[21-22],即
(2)
其中
(3)
(4)
(5)
(6)
式中vpar——雾滴速度矢量,m/s
g——重力加速度,m/s2
ρpar——雾滴颗粒密度,kg/m3
FD——粘性力系数
v——气流速度矢量,m/s
μ——流体粘性系数
CD——阻力系数
K1、K2、K3——与雷诺数相关的常数
Re——相对于流场运动的雷诺数
FM——流体与粒子相互冲击产生的力,N
FP——压强梯度力产生的作用力,N
dpar——雾滴颗粒直径,m
ei——方向矢量
六旋翼植保无人机旋翼高速旋转产生下洗风场,小型无人机的雷诺数一般在104~105之间,处于湍流状态,而在航空工程中应用最为广泛的是双方程湍流模型中的SSTk-ω湍流模型,因此本文选择SSTk-ω模型[23],压力与速度耦合采用SIMPLE算法,使用有限体积法将控制方程离散化,对流格式采用二阶迎风格式。
1.4 网格无关性验证
对于数值模拟研究,需要确定计算采用的网格数量和计算结果之间无关联性,即要进行网格无关性验证。本文选取植保无人机旋翼中心下方0.5、1、1.5 m特征点的速度进行网格无关性验证,不同数量网格的计算结果如表1所示。当网格数增加到3 877 580后,随着网格数量增大,特征点速度计算结果的相对误差在可接受范围内,考虑到网格收敛性和计算效率,采用网格数量为3 877 580。
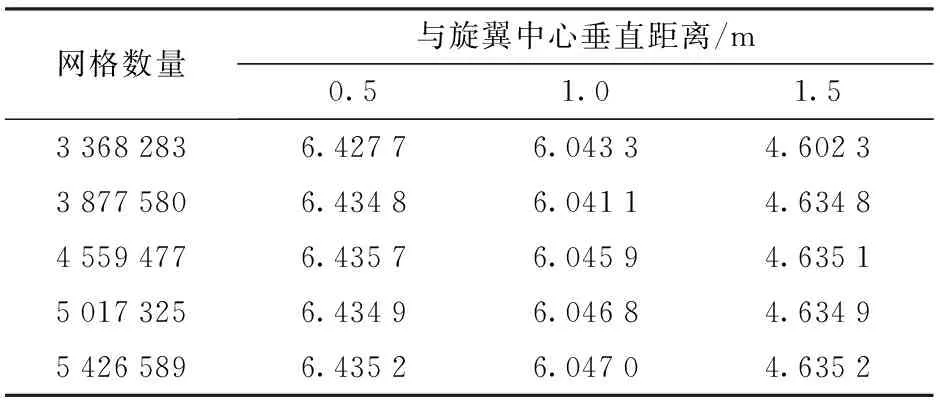
表1 网格无关性验证结果(特征点速度)Tab.1 Grid independence test (characteristic point speed) m/s
2 小型六旋翼植保无人机下洗风场分析
2.1 小型六旋翼植保无人机数值计算验证
2.1.1悬停下洗风场试验验证
小型多旋翼植保无人机的下洗风场是影响植保无人机施药质量的主要因素之一,研究植保无人机喷雾场前需要先探析无人机下洗风场的规律性。为验证数值模拟无人机旋翼下洗风场的准确性,开展无人机悬停状态下洗风场试验研究。
采用多点风速仪和空间网格相结合的六旋翼无人机立体风场测试方法,实现无人机立体风场快速准确的检测。采用日本Kayo公司生产的KANOMAX MODEL 1560型多点风速仪对无人机下洗风场中测点的风速进行逐一测量,空间网格是搭建的1 900 mm×1 000 mm的铁丝网。六旋翼无人机风场测试现场和测点布置如图3所示,风场测试在封闭宽敞的室内进行,环境温度27.5℃,环境相对湿度40%,环境风速0 m/s。

图3 下洗气流风速测试Fig.3 Downwash airflow wind speed test
风速测试点布控在小型六旋翼植保无人机下方,选取机身正下方的风速测点进行试验值和模拟值的对比分析。无人机悬停离地高度为2 m,机身正下方共设置11个测点,其中靠近旋翼处旋翼对风速影响较大,每隔100 mm布置一个测点,共布置3个,中间位置风速变化较小,每隔200 mm布置一个测点,共布置5个,靠近地面时由于近地风场的影响,每隔100 mm布置一个测点,共布置3个。风速测点的试验值和模拟值对比如表2所示,风速误差在15%以内,数值计算基本满足工程计算的精度要求,验证数值模型的准确性,该数值模型可用于分析小型六旋翼植保无人机的下洗风场和喷雾场。
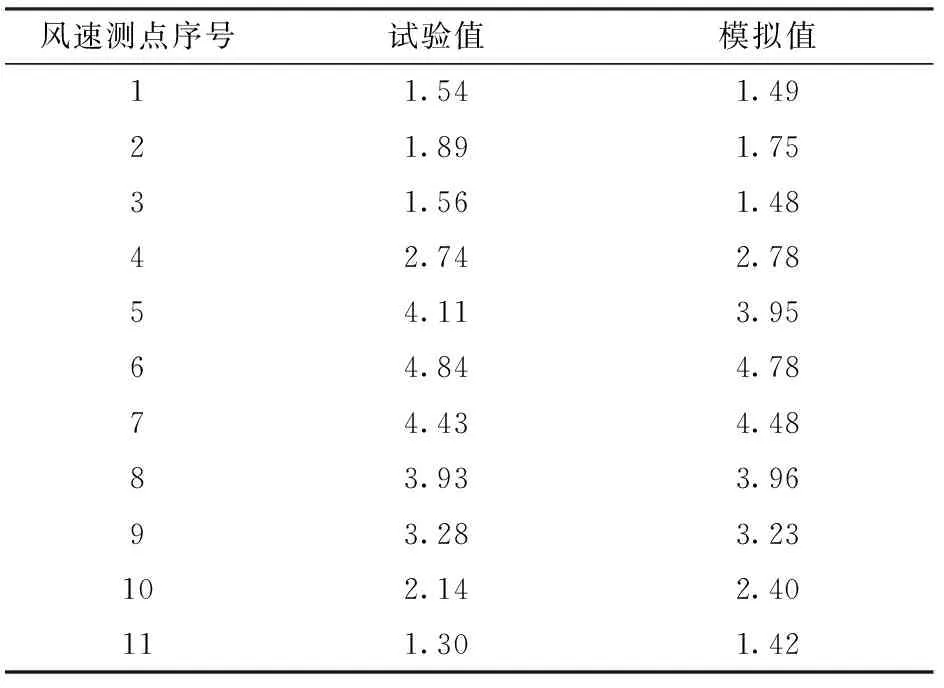
表2 机身正下方测点风速试验值与模拟值对比Tab.2 Experimental and simulated values of measurement points under fuselage m/s
2.1.2六旋翼植保无人机末速度验证
文献[24]指出,为保证雾滴的有效沉积,植保无人机的近地风场应满足末速度要求,当风场到达靶标作物时,必须仍保持一定的速度,即为末速度,末速度一般为2~4 m/s。当末速度过大时,容易造成作物倒伏;当末速度过小时,不利于雾滴的沉积。本文在植保无人机旋翼转速3 600 r/min、环境风速0 m/s时,分析旋翼离地高度1、2、3 m时小型六旋翼植保无人机的下洗风场。图4给出了不同旋翼离地高度时桨毂中心纵向剖面的速度变化曲线,旋翼离地高度越大,近地风场风速越小,旋翼离地1~3 m均满足末速度要求,验证了数值模型的准确性。
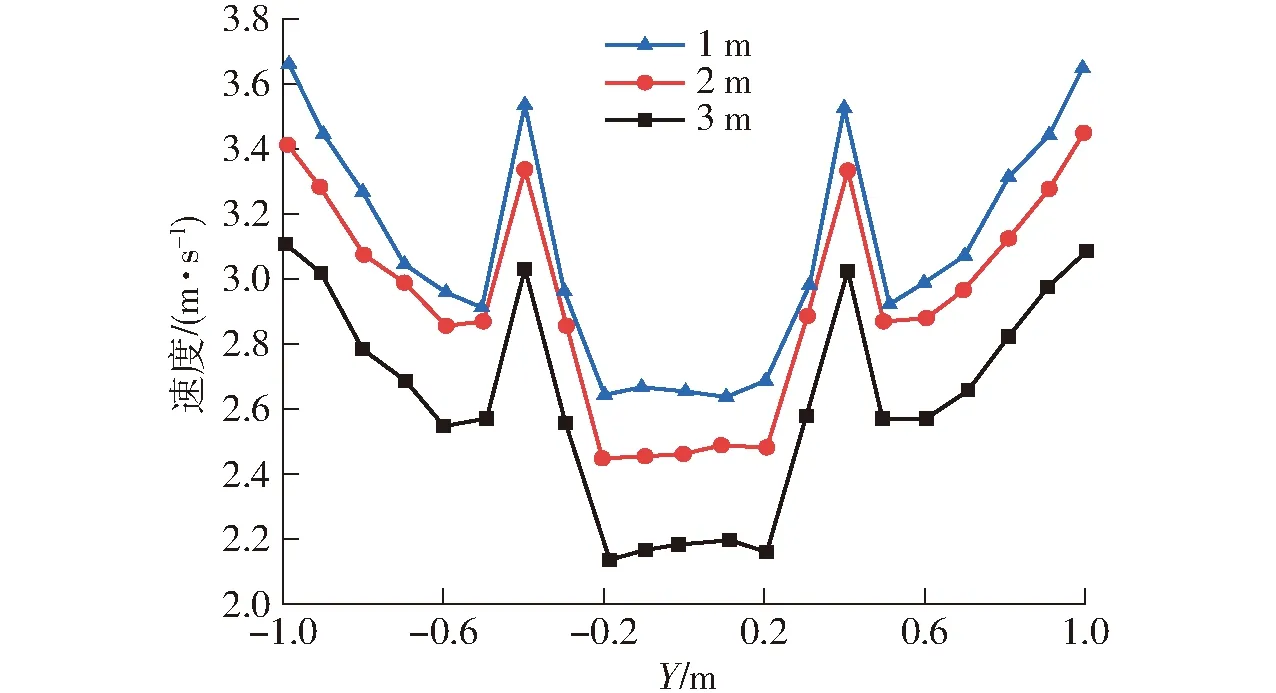
图4 不同旋翼离地高度桨毂中心剖面速度变化曲线Fig.4 Variation of rotor hub center profile speed at different rotor heights from ground
2.2 环境风速对小型六旋翼植保无人机下洗风场影响分析
小型六旋翼植保无人机飞行作业时,主要受到来流和侧风等环境风速的影响,本文针对来流和侧风对下洗风场的影响分别进行仿真分析。当小型六旋翼植保无人机作业时,不考虑环境风速的影响,本文选取六旋翼无人机桨毂中心纵向剖面作为下洗风场的特征面,图5所示为无人机下洗风场的速度云图和无人机桨毂中心纵向剖面不同高度速度变化曲线。图5显示,小型六旋翼植保无人机下洗风场沿无人机中心对称分布,无人机下洗气流在靠近地面时向两边发展形成近地风场。相同高度时,受旋翼转动影响,最大风速位于旋翼的正下方,在不同高度处,随着离地高度的降低,旋翼正下方空间点风速逐渐减小,为对来流和侧风的影响分析奠定基础。
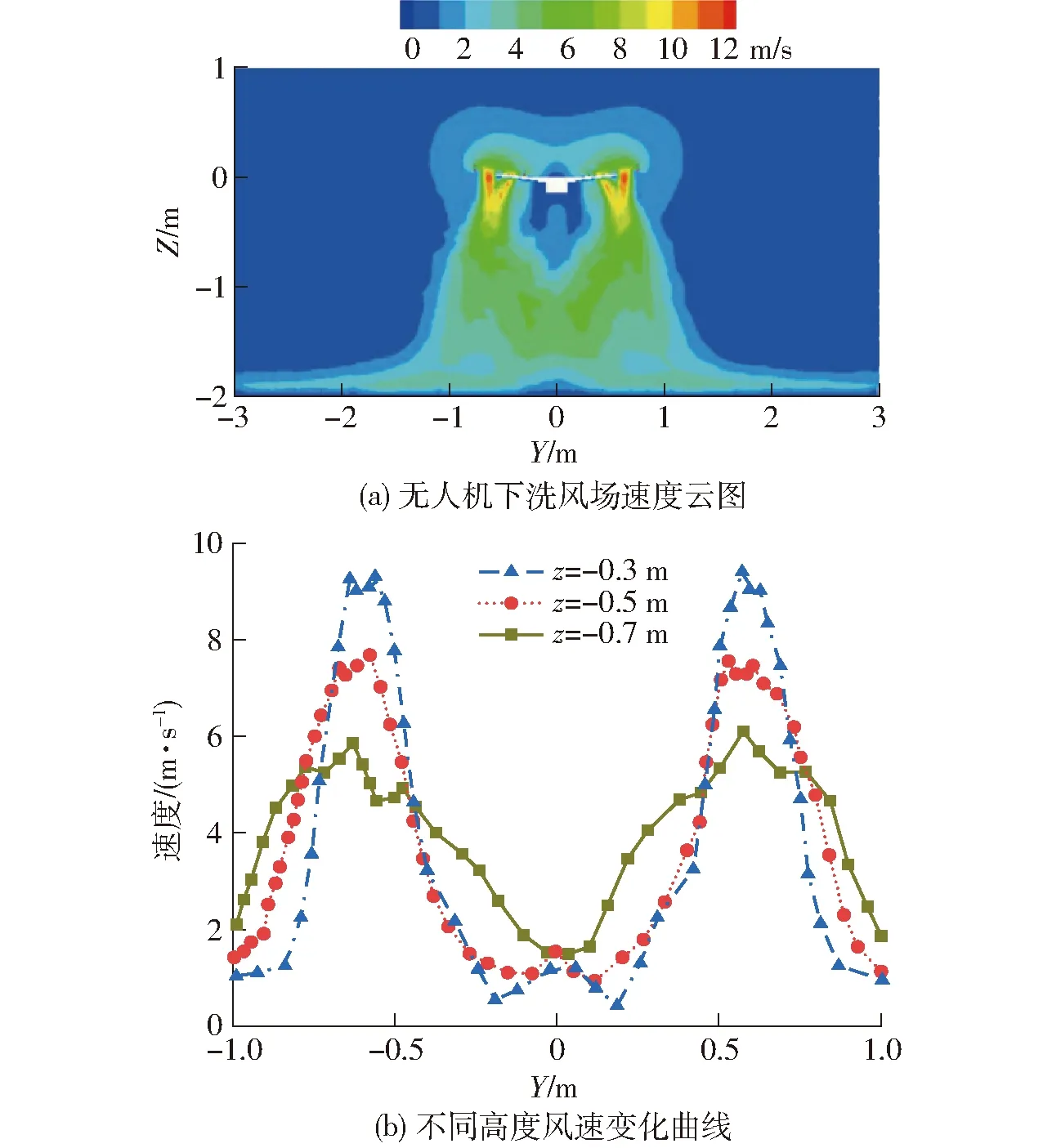
图5 六旋翼无人机下洗风场速度分布Fig.5 Six-rotor UAV downwash wind field speed distribution
2.2.1来流速度对小型六旋翼植保无人机下洗风场的影响小型六旋翼植保无人机作业时,飞行速度为3 m/s,一般无人机作业时自然风速为1 m/s。根据相对运动原理,假设无人机静止,当无人机运动方向和来流方向一致时,来流速度为4 m/s,当无人机运动方向和来流方向相反时,来流速度为2 m/s。无人机旋翼转速为3 600 r/min,旋翼离地高度为2 m,通过对比不同来流速度时下洗风场的流线图和特征线速度变化,分析来流速度对小型多旋翼植保无人机下洗风场的影响。本文选取垂直于来流方向的桨毂中心纵向剖面作为下洗风场的特征面,图6所示为不同来流速度时无人机下洗风场的速度云图和流线图。当来流速度为0 m/s时,无人机下洗风场只有旋翼高速旋转产生的稳定风场,当出现来流时,下洗风场出现漩涡,下洗风场的稳定性降低,随着来流速度的增大,下洗风场出现的漩涡高度上升,来流速度的增加对靠近无人机机身的风场影响较大。当来流速度增大至4 m/s时,近地风场消失,来流速度导致风场流动方向发生改变,然而不论来流速度的大小如何变化,下洗风场最大速度总是位于旋翼中心下方。来流速度不同时,下洗风场的稳定性受到影响,无人机下洗风场内空间各点风速大小和方向发生改变。本文选取无人机机身中心和旋翼中心下方点的风速进行研究,图7为不同来流速度时无人机机身和旋翼正下方空间点的速度图。图7a显示,机身中心正下方空间点速度峰值随着来流速度的改变而改变,当来流速度变化曲线(高度以机身为零点,向下为负)达到4 m/s时,在距离机身中心1.5 m以下,空间点速度基本保持不变,主要是因为该区域来流速度对下洗风场的影响远大于旋翼风场,在距离机身中心1.2 m处附近,速度基本达到峰值,该区域来流速度与旋翼风场耦合造成总速度增大。图7b显示,来流速度大小对旋翼下方空间点的速度基本没有影响,主要是由于旋翼下方无人机旋翼风场速度远大于来流风速。
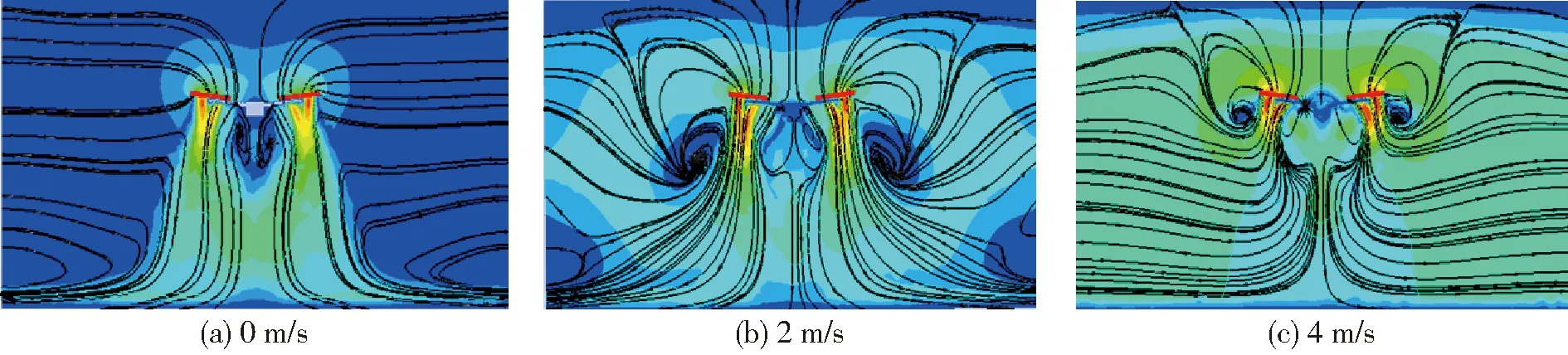
图6 不同来流速度时下洗风场速度云图和流线图Fig.6 Velocity cloud and streamline of downwash wind field at different incoming flow rates
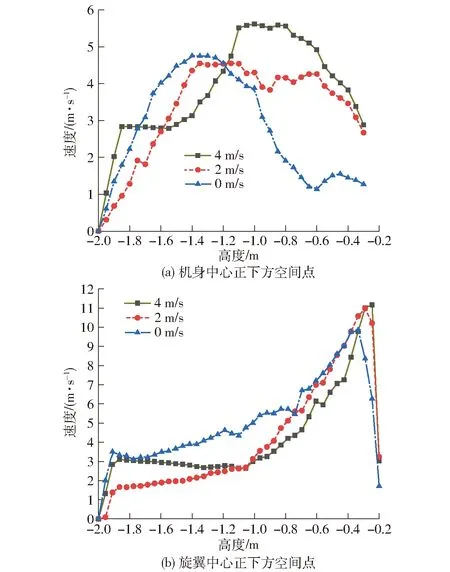
图7 不同来流速度时下洗风场空间点速度变化曲线Fig.7 Spatial point velocity variation of downwash wind field at different incoming flows
2.2.2侧风对小型六旋翼植保无人机下洗风场的影响当环境风速方向垂直于植保无人机作业运动方向时,外界环境风即为侧风,本文选取旋翼转速3 600 r/min,旋翼离地高度2 m,分析侧风风速为1 m/s时对无人机下洗风场的影响。本文选取桨毂中心纵向剖面作为下洗风场的特征面,该特征面平行于侧风方向,侧风方向由左向右。图8显示,侧风作用下,无人机下洗风场风向向右倾斜,风场不沿中轴线对称分布,无人机左侧旋翼下方风场出现漩涡,下洗风场稳定性降低。当下洗风场不对称分布时,必然导致喷雾雾滴的不均匀分布,为提高小型多旋翼植保无人机喷雾雾滴的均匀性,应尽量避免侧风的影响,即在无人机作业时,应保证小型多旋翼植保无人机作业方向与环境风速方向保持平行。
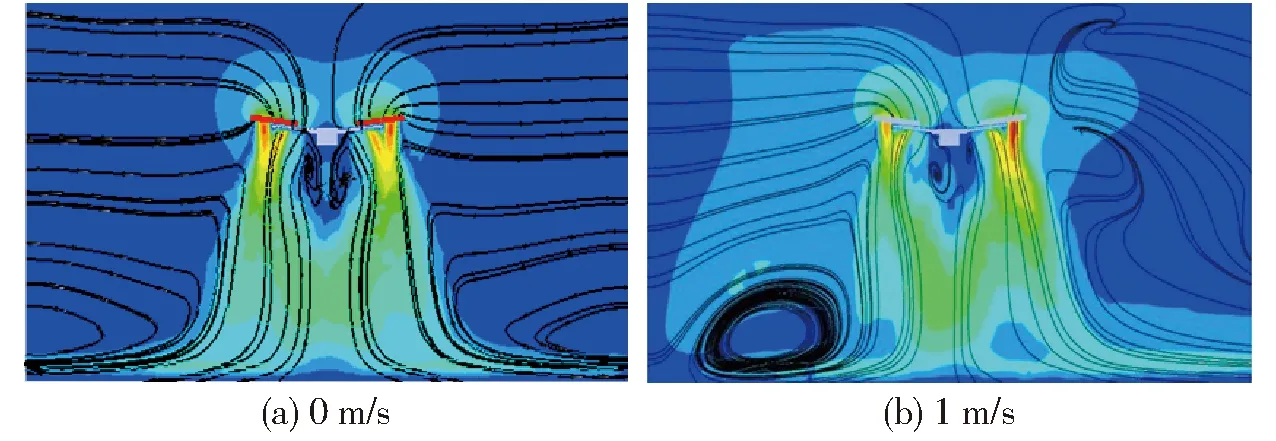
图8 有无侧风时下洗风场速度云图和流线图Fig.8 Velocity cloud and streamline of downwash wind field with and without side wind
3 小型六旋翼植保无人机喷雾场分析
喷嘴是小型六旋翼植保无人机喷雾的执行机构,建立喷嘴喷雾模型是研究植保无人机喷雾场的前提。本文选用的喷嘴为广角锥形喷嘴,喷嘴喷雾角110°,喷雾压力0.4 MPa,喷嘴流量0.91 L/min。采用Discrete Phase Model(DPM)引入雾滴颗粒离散相,颗粒注入类型选择cone圆锥喷嘴,颗粒为惰性粒子,喷嘴的半入射角和喷嘴流量分别设置为55°和0.91 L/min。采用离散随机游走模型模拟雾滴粒子在计算域中的运动,雾滴粒子在沉积区域ground面离散相边界条件为trap,雾滴粒子在飘移区域计算域四周和up面离散相边界条件为escape。通过含离散相的两相流计算对小型六旋翼植保无人机喷雾场进行数值模拟,研究植保无人机施药作业时雾滴的流动和沉积特性。在y轴两端对应的旋翼正下方300 mm和机身正中心下方300 mm分别增加两对喷嘴和一个独立喷嘴,将喷嘴依次编号,其中1号和5号喷嘴在旋翼外侧,2号和4号喷嘴在旋翼内侧,3号喷嘴在机身正下方。图9给出了雾滴粒子在下洗风场中的运动轨迹和喷雾场雾滴沉积云图。

图9 雾滴沉积云图和雾滴运动轨迹Fig.9 Droplet deposition cloud and droplet motion trajectory
图9a、9b显示,3号喷嘴下雾滴飘移最严重,农药雾滴脱离靶标区域,沉积到非靶标区,在其正下方几乎没有雾滴沉积,这主要是由于机身正下方风场稳定性差,造成3号喷嘴雾滴运动轨迹混乱无序,当去除3号喷嘴时,雾滴沉积云图两边对称,提高雾滴沉积均匀性。如图9c所示,雾滴受到下洗风场影响,每个喷嘴下方的雾滴均出现飘移,其中3号喷嘴下方雾滴飘移最严重,这与雾滴沉积云图相对应。植保无人机在作业过程中,不可避免会受到自然风速的影响,上述分析了来流2 m/s和4 m/s时的下洗风场,本文研究对应状态下的雾滴运动轨迹,喷嘴布置去除3号喷嘴,其余喷嘴位置不变。图10所示为不同来流速度时的雾滴运动轨迹,在下洗风场和来流耦合作用时,雾滴飘移加剧,在风场漩涡处雾滴卷积,随着来流速度的增大,雾滴卷积加剧,雾滴飘移量随之增大。在植保无人机作业时,需要尽量避免来流影响,选择晴朗无风的环境进行喷雾作业,提高雾滴沉积均匀性,减小农药飘移。
4 结论
(1)通过分析小型六旋翼植保无人机的下洗风场特性可以得出:本文选取的小型植保无人机参数满足末速度原则;来流造成无人机下洗风场出现漩涡,随着来流速度增大,漩涡高度上升,来流对靠近机身处的风场稳定性影响较大;下洗风场速度峰值总是位于旋翼中心下方,来流速度对机身正下方流场的影响大于对旋翼正下方流场;侧风造成无人机下洗风场出现较大漩涡,下洗风场稳定性降低。(2)通过分析小型六旋翼植保无人机的喷雾场特性可以得出:旋翼正下方对称布置喷嘴更有利于提高雾滴沉积均匀性;来流造成雾滴卷积,雾滴飘移严重,雾滴飘移量随着来流速度提高而增大。(3)在植保无人机实际作业时,为降低雾滴飘移,提高农药利用率,小型六旋翼植保无人机作业方向需要与环境风向保持平行,同时应在晴朗环境下进行施药作业,无人机喷嘴应在旋翼下方对称布置。

图10 不同来流速度的雾滴运动轨迹Fig.10 Droplet trajectory at different incoming flow velocities
